
一种基于人工智能的障碍物检测方法.pdf

是你****嘉嘉

1/8

2/8
3/8
4/8

5/8
6/8

7/8

8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种基于人工智能的障碍物检测方法.pdf
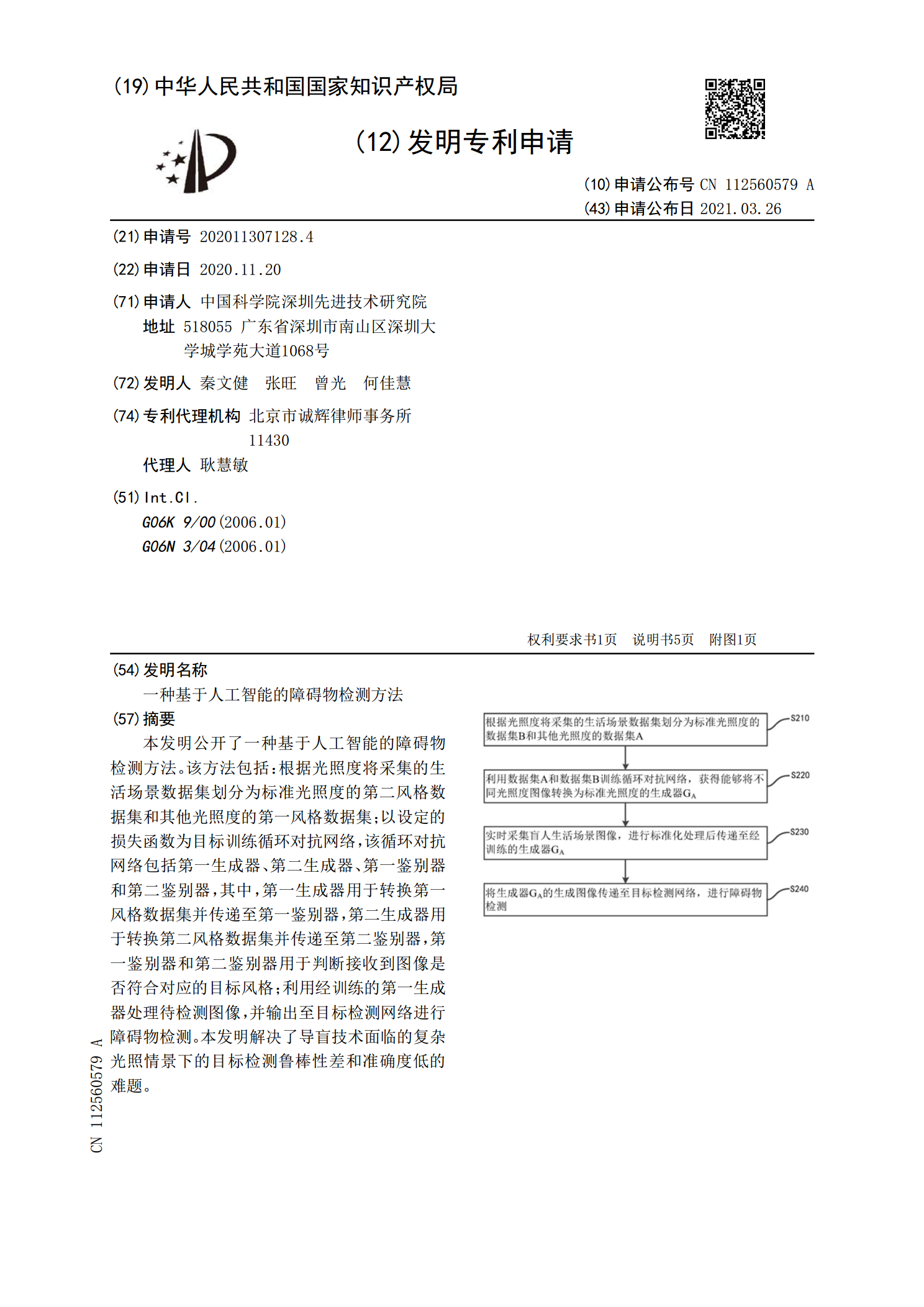
本发明公开了一种基于人工智能的障碍物检测方法。该方法包括:根据光照度将采集的生活场景数据集划分为标准光照度的第二风格数据集和其他光照度的第一风格数据集;以设定的损失函数为目标训练循环对抗网络,该循环对抗网络包括第一生成器、第二生成器、第一鉴别器和第二鉴别器,其中,第一生成器用于转换第一风格数据集并传递至第一鉴别器,第二生成器用于转换第二风格数据集并传递至第二鉴别器,第一鉴别器和第二鉴别器用于判断接收到图像是否符合对应的目标风格;利用经训练的第一生成器处理待检测图像,并输出至目标检测网络进行障碍物检测。本发
一种基于空间分割的障碍物检测方法.pdf
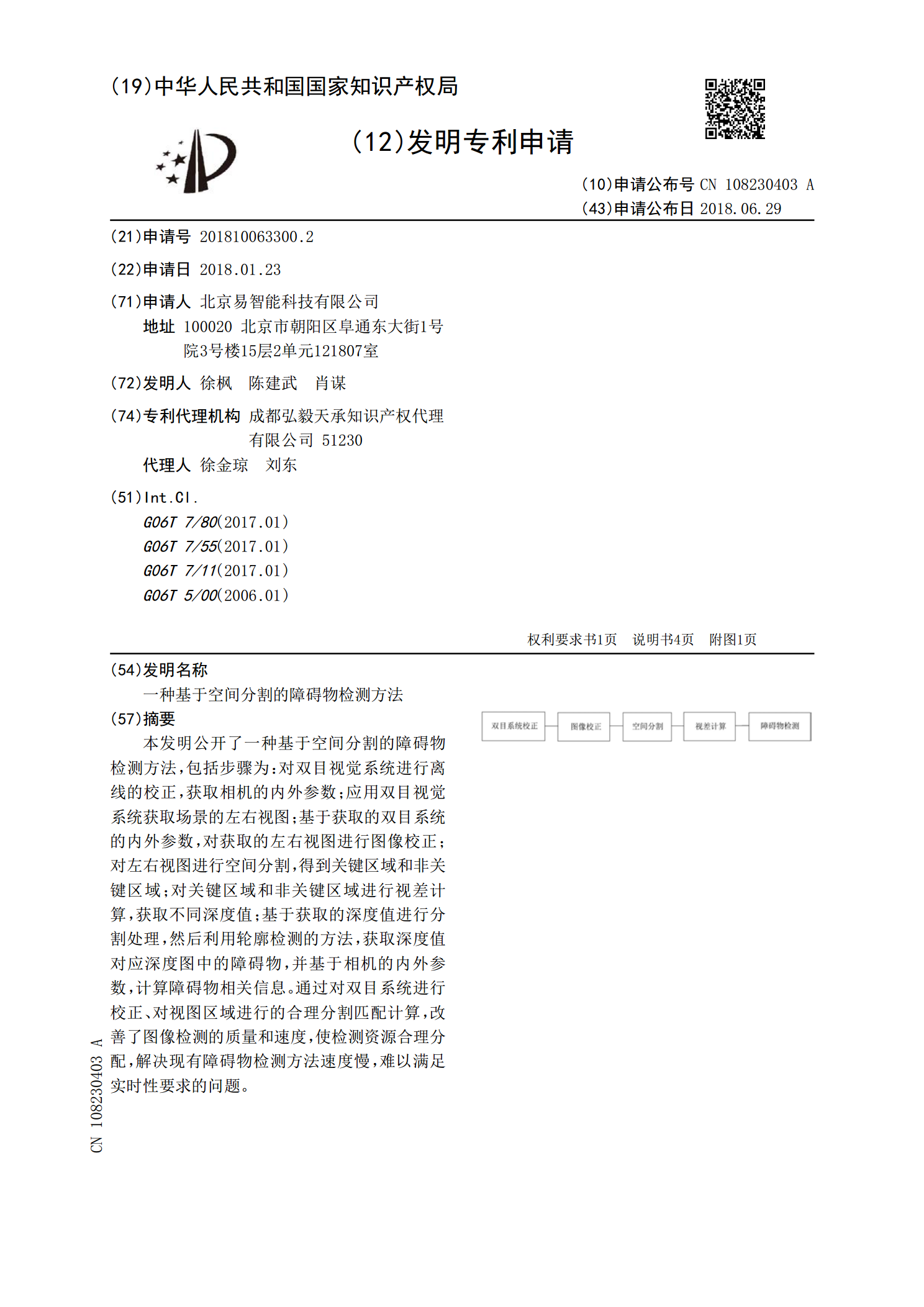
本发明公开了一种基于空间分割的障碍物检测方法,包括步骤为:对双目视觉系统进行离线的校正,获取相机的内外参数;应用双目视觉系统获取场景的左右视图;基于获取的双目系统的内外参数,对获取的左右视图进行图像校正;对左右视图进行空间分割,得到关键区域和非关键区域;对关键区域和非关键区域进行视差计算,获取不同深度值;基于获取的深度值进行分割处理,然后利用轮廓检测的方法,获取深度值对应深度图中的障碍物,并基于相机的内外参数,计算障碍物相关信息。通过对双目系统进行校正、对视图区域进行的合理分割匹配计算,改善了图像检测的质
基于人工智能导盲的多模态融合障碍物检测方法及装置.pdf
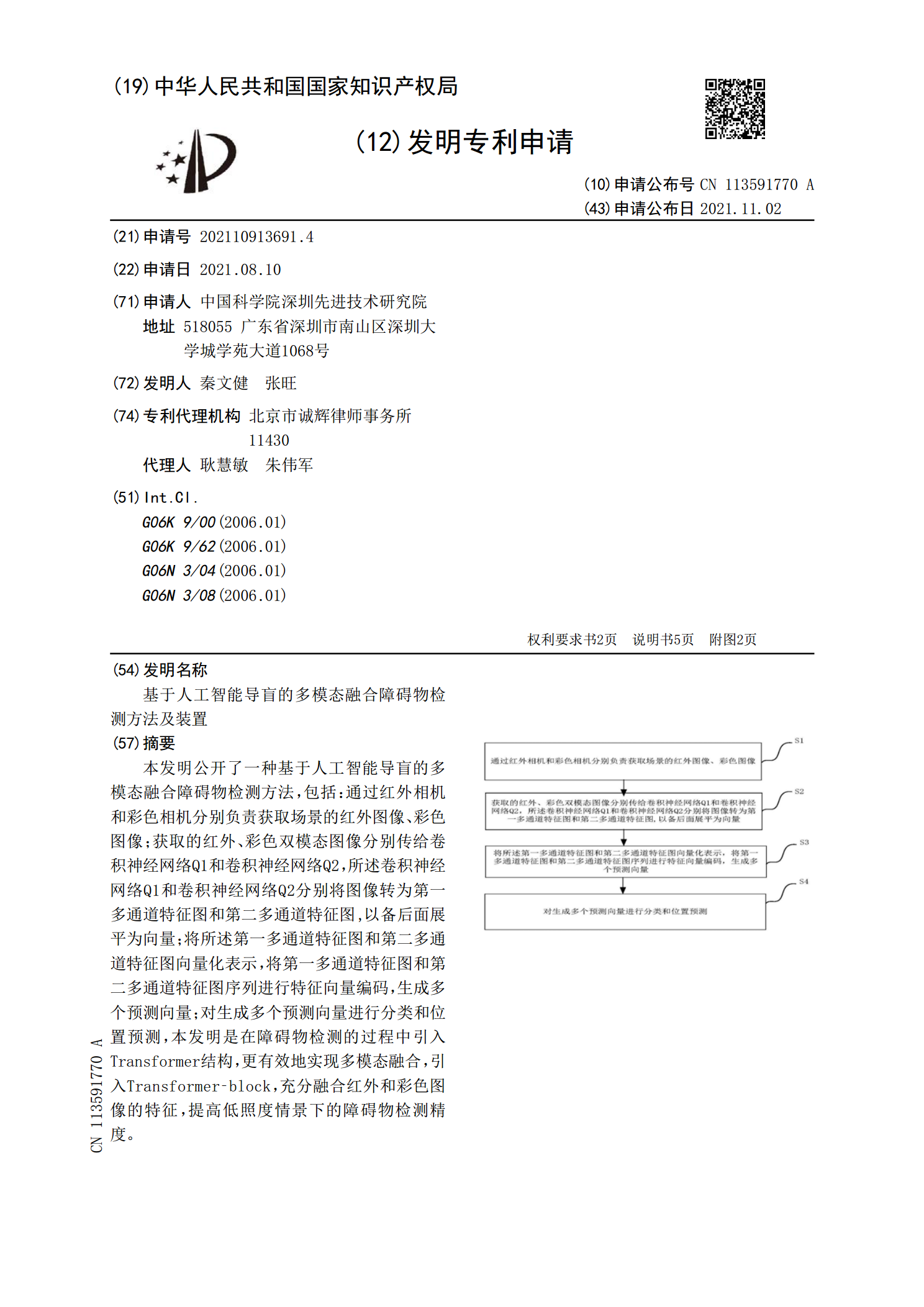
本发明公开了一种基于人工智能导盲的多模态融合障碍物检测方法,包括:通过红外相机和彩色相机分别负责获取场景的红外图像、彩色图像;获取的红外、彩色双模态图像分别传给卷积神经网络Q1和卷积神经网络Q2,所述卷积神经网络Q1和卷积神经网络Q2分别将图像转为第一多通道特征图和第二多通道特征图,以备后面展平为向量;将所述第一多通道特征图和第二多通道特征图向量化表示,将第一多通道特征图和第二多通道特征图序列进行特征向量编码,生成多个预测向量;对生成多个预测向量进行分类和位置预测,本发明是在障碍物检测的过程中引入Tran

一种基于车载设备的障碍物实时检测方法.pdf
本申请提供了一种基于车载设备的障碍物实时检测方法,解决结构循环往复缺少特征的隧道内环境中障碍位置判断精度低的技术问题。本申请提供基于车载设备的障碍物实时检测方法包括:获取轨道行进区域的激光点云数据和摄像头图像数据;其中,摄像头图像数据为多帧约束;融合激光点云数据和摄像头图像数据,得到融合点云数据;根据融合点云数据,绘制点云地图;标记点云地图上的安全限界,安全限界为轨道行进区域中车辆安全行驶空间的轮廓;获取车辆的第一位置,第一位置为车辆的实时位置和姿态信息在点云地图中对应的位置坐标;在点云地图上,标记第一位

一种基于高精度地图的障碍物检测方法.pdf
本发明属于自动驾驶的障碍物检测技术领域,具体公开了一种基于高精度地图的障碍物检测方法,包括:构建地图的原始点云;点云预处理;对地图点云与实时点云进行降采样,并将局部特征点云作为参考点进行局部重叠点云匹配;利用背景差分算法,参考地图点云为地面点云,根据地图点云与实时点云的差异,提取实时点云中的地面点云与非地面点云;根据最近三帧的非地面点云在栅格地图中的分布自适应调整邻域参数,再结合密度聚类算法输出各个障碍物的边界框;排除了大量冗余点的干扰,有效地缩短了配准算法的运行时间;排除了矿区中地面和挡墙的点云干扰,有