
一种基于高精度地图的障碍物检测方法.pdf

夏萍****文章

1/10
2/10

3/10

4/10
5/10
6/10

7/10
8/10

9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种基于高精度地图的障碍物检测方法.pdf
本发明属于自动驾驶的障碍物检测技术领域,具体公开了一种基于高精度地图的障碍物检测方法,包括:构建地图的原始点云;点云预处理;对地图点云与实时点云进行降采样,并将局部特征点云作为参考点进行局部重叠点云匹配;利用背景差分算法,参考地图点云为地面点云,根据地图点云与实时点云的差异,提取实时点云中的地面点云与非地面点云;根据最近三帧的非地面点云在栅格地图中的分布自适应调整邻域参数,再结合密度聚类算法输出各个障碍物的边界框;排除了大量冗余点的干扰,有效地缩短了配准算法的运行时间;排除了矿区中地面和挡墙的点云干扰,有

一种基于高精度地图的路径跟踪方法.docx
一种基于高精度地图的路径跟踪方法基于高精度地图的路径跟踪方法摘要:随着自动驾驶技术的快速发展,路径跟踪是实现自动驾驶的一个核心问题。高精度地图作为自动驾驶系统中的重要组成部分,能够提供准确的道路拓扑结构、车道信息、交通规则等信息,为路径跟踪提供了关键的先验知识。本论文提出了一种基于高精度地图的路径跟踪方法,该方法将高精度地图与实时感知数据相结合,通过预测车辆当前所处的位置和预测未来的状态,实现精准的路径跟踪。实验结果表明,该方法能够有效地提高路径跟踪的精度和鲁棒性。关键词:高精度地图、路径跟踪、自动驾驶、

一种基于代价地图的记忆性存储障碍物方法.pdf
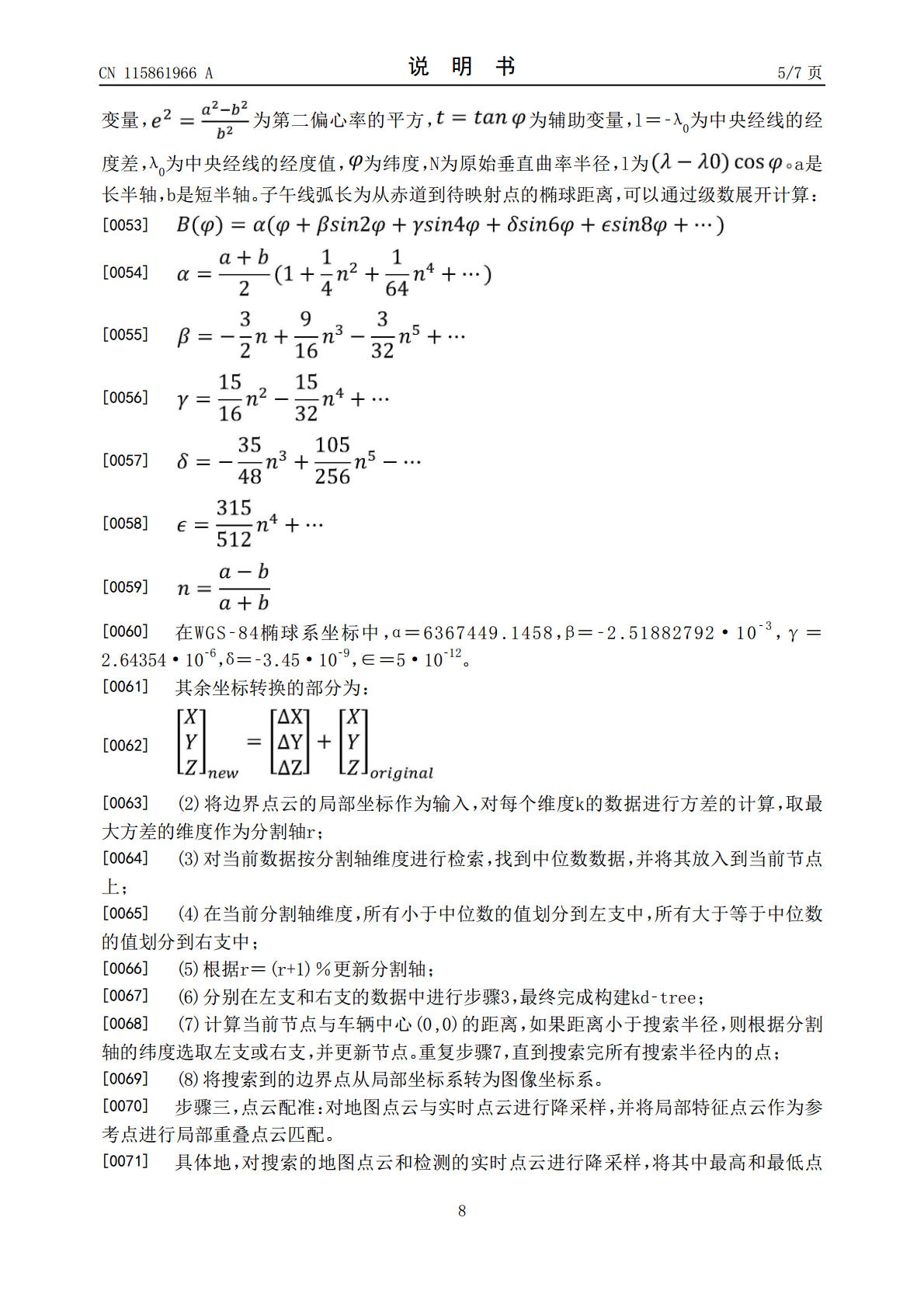
本发明涉及一种基于代价地图的记忆性存储障碍物方法,包括以下步骤:1)在移动机器人行驶过程中,将传感器检测到的障碍物数据经过处理加入到代价地图中障碍物层中的二维栅格地图内;2)分别构建一个与栅格地图相同规模的时间地图和次数地图,用以分别记录栅格地图相应位置的更新时间以及障碍物的删除次数;3)根据传感器检测区域和时间地图确定障碍物层的更新区域;4)在更新区域内更新栅格地图,并根据设定的衰减函数更新对应的代价值;5)在代价地图的膨胀层中基于代价值对记忆性存储的障碍物进行膨胀。与现有技术相比,本发明具有动态删除观
一种基于代价地图的记忆性存储障碍物方法.pdf
本发明涉及一种基于代价地图的记忆性存储障碍物方法,包括以下步骤:1)在移动机器人行驶过程中,将传感器检测到的障碍物数据经过处理加入到代价地图中障碍物层中的二维栅格地图内;2)分别构建一个与栅格地图相同规模的时间地图和次数地图,用以分别记录栅格地图相应位置的更新时间以及障碍物的删除次数;3)根据传感器检测区域和时间地图确定障碍物层的更新区域;4)在更新区域内更新栅格地图,并根据设定的衰减函数更新对应的代价值;5)在代价地图的膨胀层中基于代价值对记忆性存储的障碍物进行膨胀。与现有技术相比,本发明具有动态删除观
一种基于牵引车高精度地图制作方法.pdf
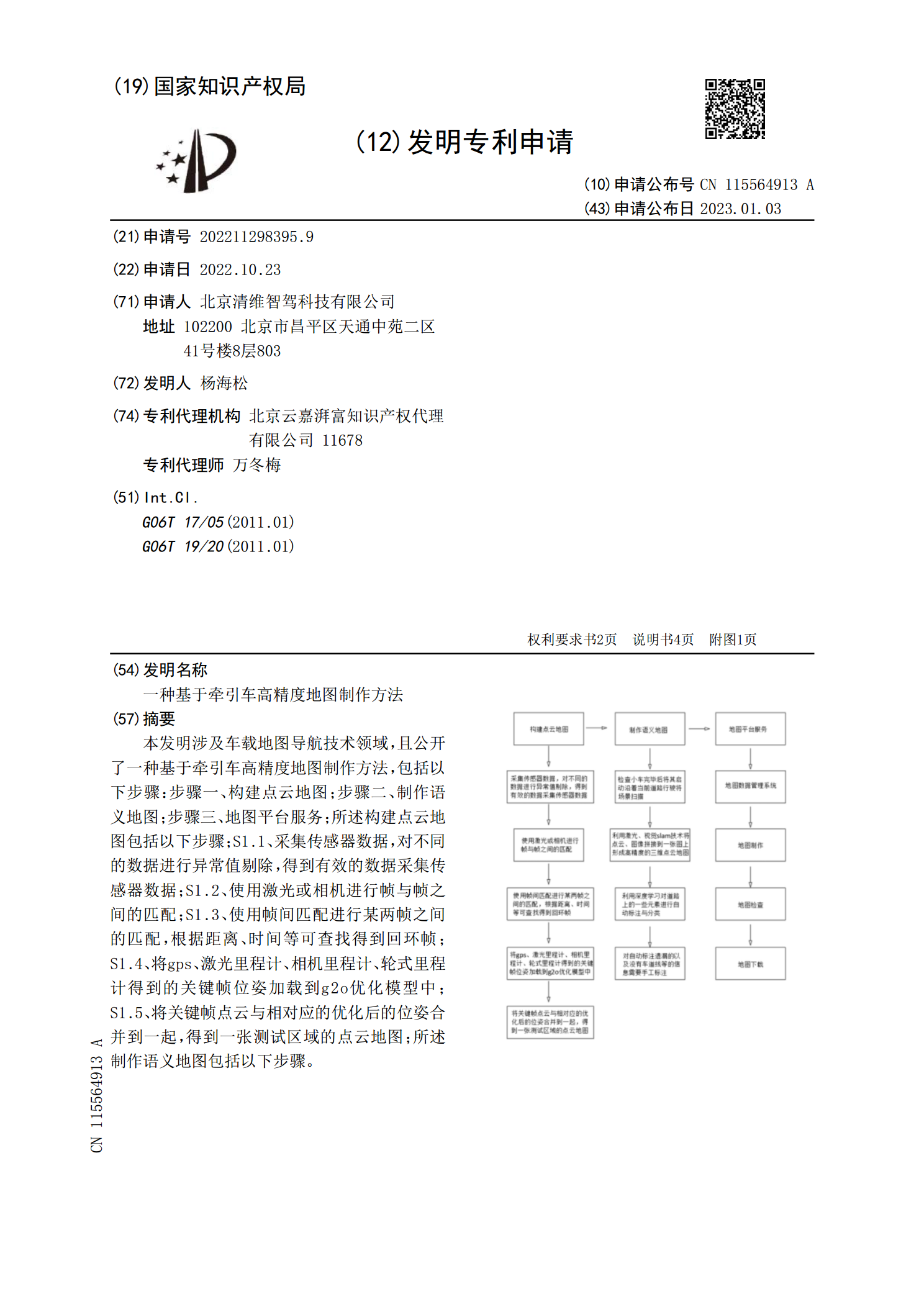
本发明涉及车载地图导航技术领域,且公开了一种基于牵引车高精度地图制作方法,包括以下步骤:步骤一、构建点云地图;步骤二、制作语义地图;步骤三、地图平台服务;所述构建点云地图包括以下步骤;S1.1、采集传感器数据,对不同的数据进行异常值剔除,得到有效的数据采集传感器数据;S1.2、使用激光或相机进行帧与帧之间的匹配;S1.3、使用帧间匹配进行某两帧之间的匹配,根据距离、时间等可查找得到回环帧;S1.4、将gps、激光里程计、相机里程计、轮式里程计得到的关键帧位姿加载到g2o优化模型中;S1.5、将关键帧点云与