
一种基于车载设备的障碍物实时检测方法.pdf

诗文****仙女

1/10
2/10

3/10
4/10
5/10

6/10

7/10

8/10
9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种基于车载设备的障碍物实时检测方法.pdf
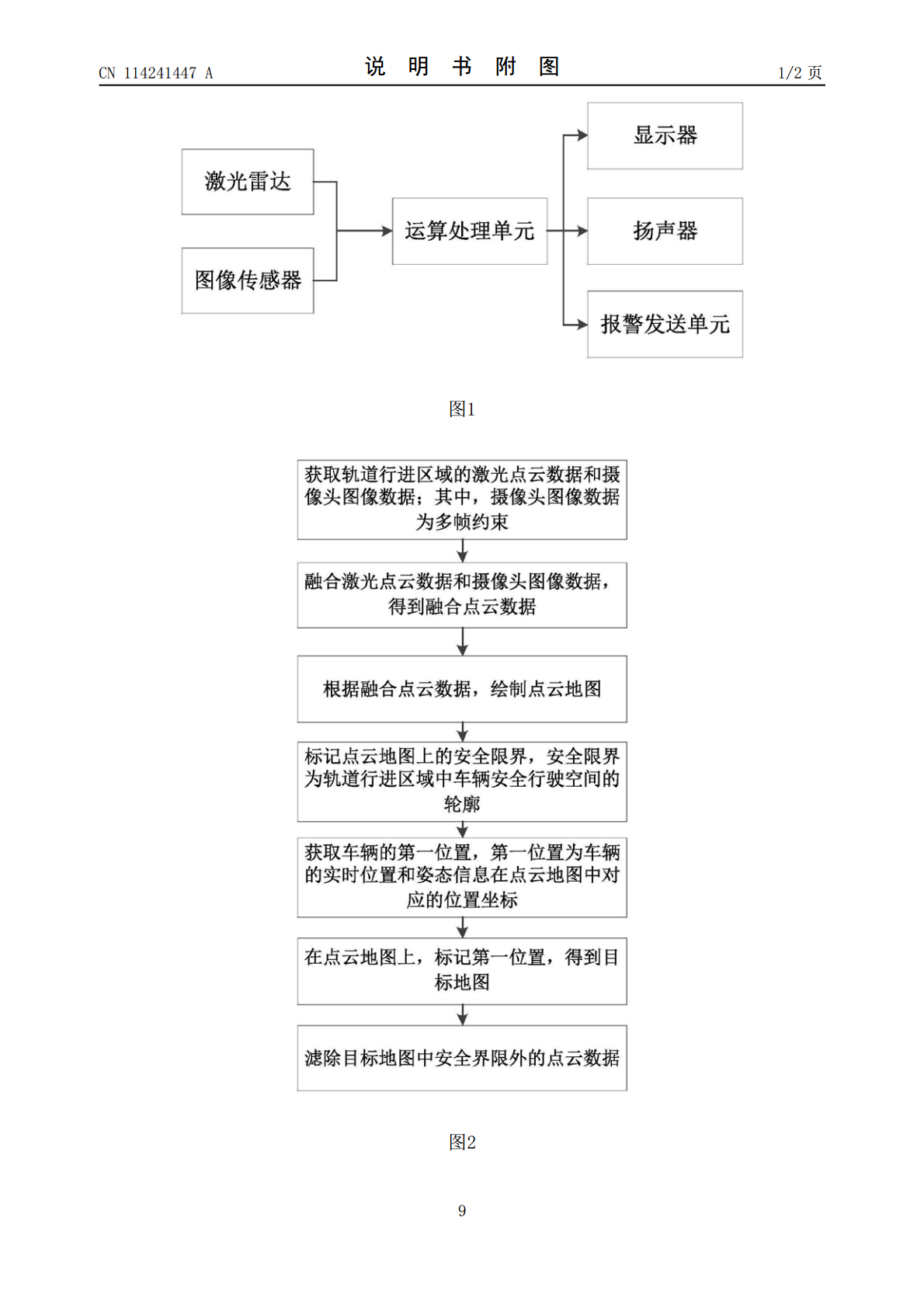
本申请提供了一种基于车载设备的障碍物实时检测方法,解决结构循环往复缺少特征的隧道内环境中障碍位置判断精度低的技术问题。本申请提供基于车载设备的障碍物实时检测方法包括:获取轨道行进区域的激光点云数据和摄像头图像数据;其中,摄像头图像数据为多帧约束;融合激光点云数据和摄像头图像数据,得到融合点云数据;根据融合点云数据,绘制点云地图;标记点云地图上的安全限界,安全限界为轨道行进区域中车辆安全行驶空间的轮廓;获取车辆的第一位置,第一位置为车辆的实时位置和姿态信息在点云地图中对应的位置坐标;在点云地图上,标记第一位

一种基于图像特征标定的实时障碍物检测方法.pdf
本发明公开了一种基于图像特征标定的实时障碍物检测方法,包括以下步骤:步骤一:图像采集与预处理;步骤二:通过改进的LOG算法对所述灰度图进行图像特征的提取,获得连续两帧灰度图的特征图;步骤三:通过改进的FLANN算法对特征图进行特征匹配,获得连续两帧的特征图之间的匹配关系图;步骤四:通过A‑D匹配过滤算法对匹配关系图内的特征点进行过滤,过滤特征点后获得新的匹配关系图;步骤五:对障碍物进行标定,获得障碍物的运动方向和距离。本发明,通过改进LOG算法、改进FLANN算法、A‑D过滤算法获得障碍物特征点及对应关系

基于回波特征的无人车载雷达地形障碍物的检测方法.pdf
本发明提出的一种基于回波特征的无人车载雷达地形障碍物的检测方法,利用地形障碍物的回波多普勒频移特征和高分辨距离像特征,实现了陡坡和壕沟的检测与识别。适合将该方法应用于小型化的无人车载毫米波雷达。与现有技术相比,采用本发明方法设计的无人车载防撞雷达,具有以下两方面的有益效果:便于实现雷达小型化,由一维线性阵列即可实现障碍物方位和俯仰信息的检测,省却了复杂的伺服系统。利用毫米波雷达进行地形障碍物检测,可以克服烟尘雨雾等恶劣气候的影响,增强了雷达全天候工作的能力。

一种盲区障碍物处理方法、装置、车载设备及存储介质.pdf
本发明实施例涉及一种盲区障碍物处理方法、装置、车载设备及存储介质,方法包括:获取图像传感器采集的图像信息;确定图像信息中的障碍物信息;基于障碍物信息以及图像传感器的盲区边界,确定盲区障碍物;在确定盲区障碍物后,在图像传感器的前方预设距离生成模拟障碍物;在生成模拟障碍物后,基于预设自动驾驶策略控制车辆。本发明实施例通过分析图像传感器采集的图像信息中的障碍物,并结合图像传感器的盲区边界,确定图像传感器的盲区是否存在障碍物,进而调整当前的自动驾驶策略,减少盲区障碍物对车辆自动驾驶的影响。

一种基于车载实时监控的车辆驾驶辅助方法及装置.pdf
本发明公开了一种基于车载实时监控的车辆驾驶辅助方法及装置,其中,所述方法包括:进行车辆四周的实时视频采集处理,获得车辆四周的实时视频数据;进行视频拼接处理,形成360度全景实时视频数据;进行分帧处理,形成全景实时视频帧数据;识别全景实时视频帧数据中的目标数据,并确定目标数据在车辆当前位置的相对位置和所述目标数据的类别;进行目标识别和/或者目标轨迹预测处理,获得所述目标数据的识别结果和/或目标轨迹预测结果;基于车辆的当前状态和所述目标数据的识别结果和/或目标轨迹预测结果向车辆的驾驶用户进行驾驶辅助预警。在本