
一种智能割草机器人混合路径规划方法.pdf

雨巷****碧易


1/10

2/10

3/10

4/10

5/10

6/10
7/10

8/10

9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种智能割草机器人混合路径规划方法.pdf
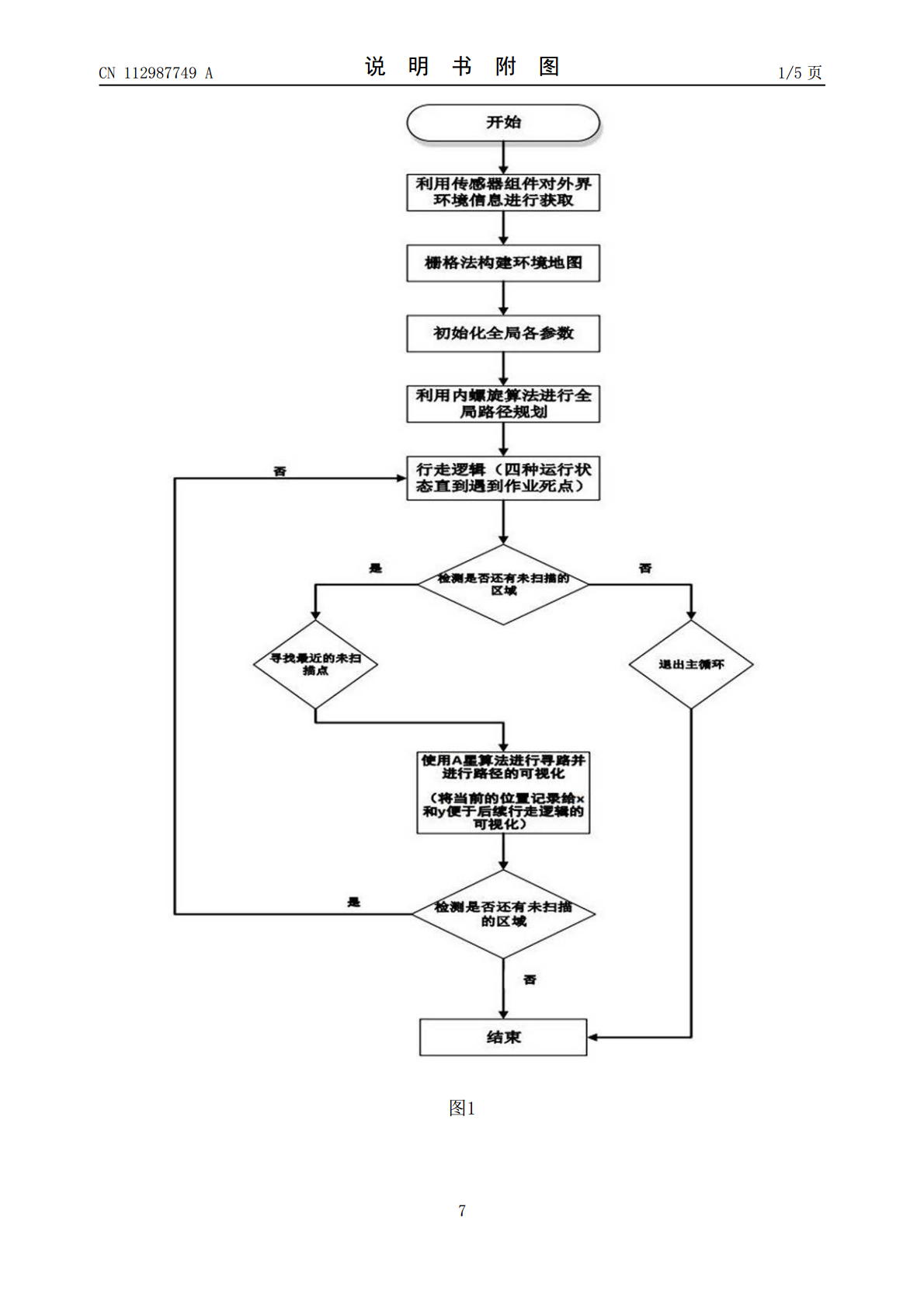
本发明提供一种智能割草机器人混合路径规划方法,本发明将内螺旋算法和A星寻路算法相结合,避免了搜索路径的盲目性,减少了搜索时长,达到在约束条件下的相互弥补,提高智能割草机路径规划解决方案的质量和效率;本发明方法相比于单一的路径规划方法,可以使智能割草机遇到作业死点时,利用A星寻路算法,缩小了搜索空间,迅速在剩余未作业区域找到最近点,并实现动态规划和避障功能,保证了智能割草机器人运动过程中的实时性和安全性,完成了智能割草机器人全面有序割草的目标。
一种割草机器人路径规划方法及割草机器人.pdf
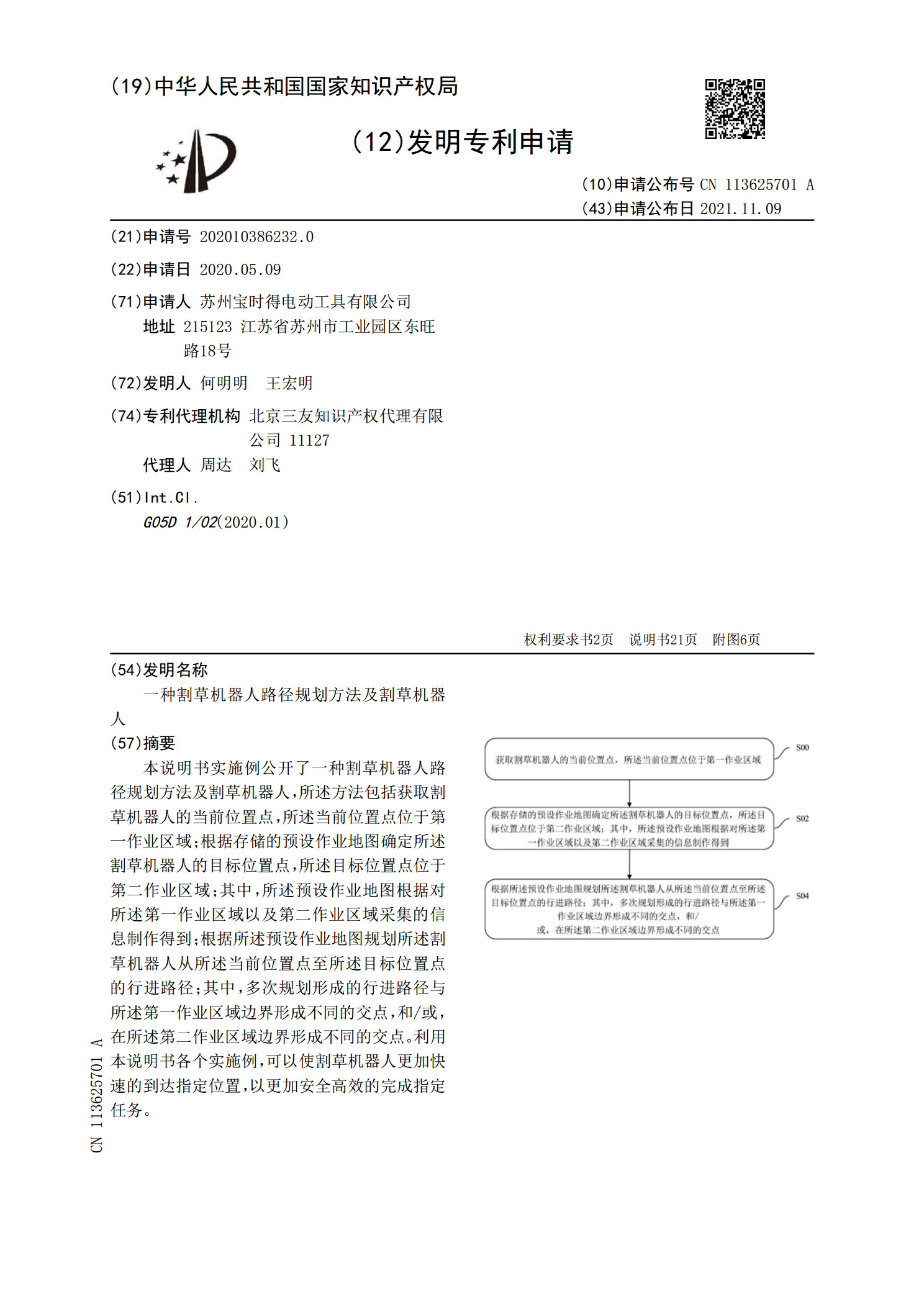
本说明书实施例公开了一种割草机器人路径规划方法及割草机器人,所述方法包括获取割草机器人的当前位置点,所述当前位置点位于第一作业区域;根据存储的预设作业地图确定所述割草机器人的目标位置点,所述目标位置点位于第二作业区域;其中,所述预设作业地图根据对所述第一作业区域以及第二作业区域采集的信息制作得到;根据所述预设作业地图规划所述割草机器人从所述当前位置点至所述目标位置点的行进路径;其中,多次规划形成的行进路径与所述第一作业区域边界形成不同的交点,和/或,在所述第二作业区域边界形成不同的交点。利用本说明书各个实

一种智能割草机器人.pdf
本发明涉及了一种智能割草机器人,它包括车体,车体安装有行走轮;车体的顶侧靠前的位置安装有差分GPS、靠后的位置设置有控制面板;车体的前侧和后侧分别设置有超声波传感器,车体的前侧还设置有双目相机;车体的底侧靠后的位置设置有修剪刀具;车体的内部靠近行走轮的位置设置有行走轮驱动机构;车体的内部与修剪刀具相对应的位置设置有用于驱动修剪刀具的修剪驱动机构;车体的中间位置设置有控制模块;差分GPS、控制面板、超声波传感器、双目相机、行走轮驱动机构、修剪驱动机构分别与嵌入式控制板连接。本发明提供了一种智能割草机器人,可

一种陡坡智能割草机器人及控制方法.pdf
本发明涉及一种陡坡智能割草机器人及控制方法,其中割草机器人包括安装有动力装置、行走轮和割草装置的底盘,所述底盘上还安装有卷扬装置,所述卷扬装置的绳索连接有机械抓手。本发明避免了陡坡除草存在的安全性问题,实现了在陡坡上稳定工作,而且除草覆盖面大;利用机械抓手抓住固定柱并通过绳索拉住机器人的方式,使机器人能够稳定在陡坡上工作而不发生倾翻;90°活页的设置使得滚刀可以自由越过土丘和一般障碍物,在行进过程中机器人能实现自动避障功能。
割草机器人及智能割草机器人.pdf
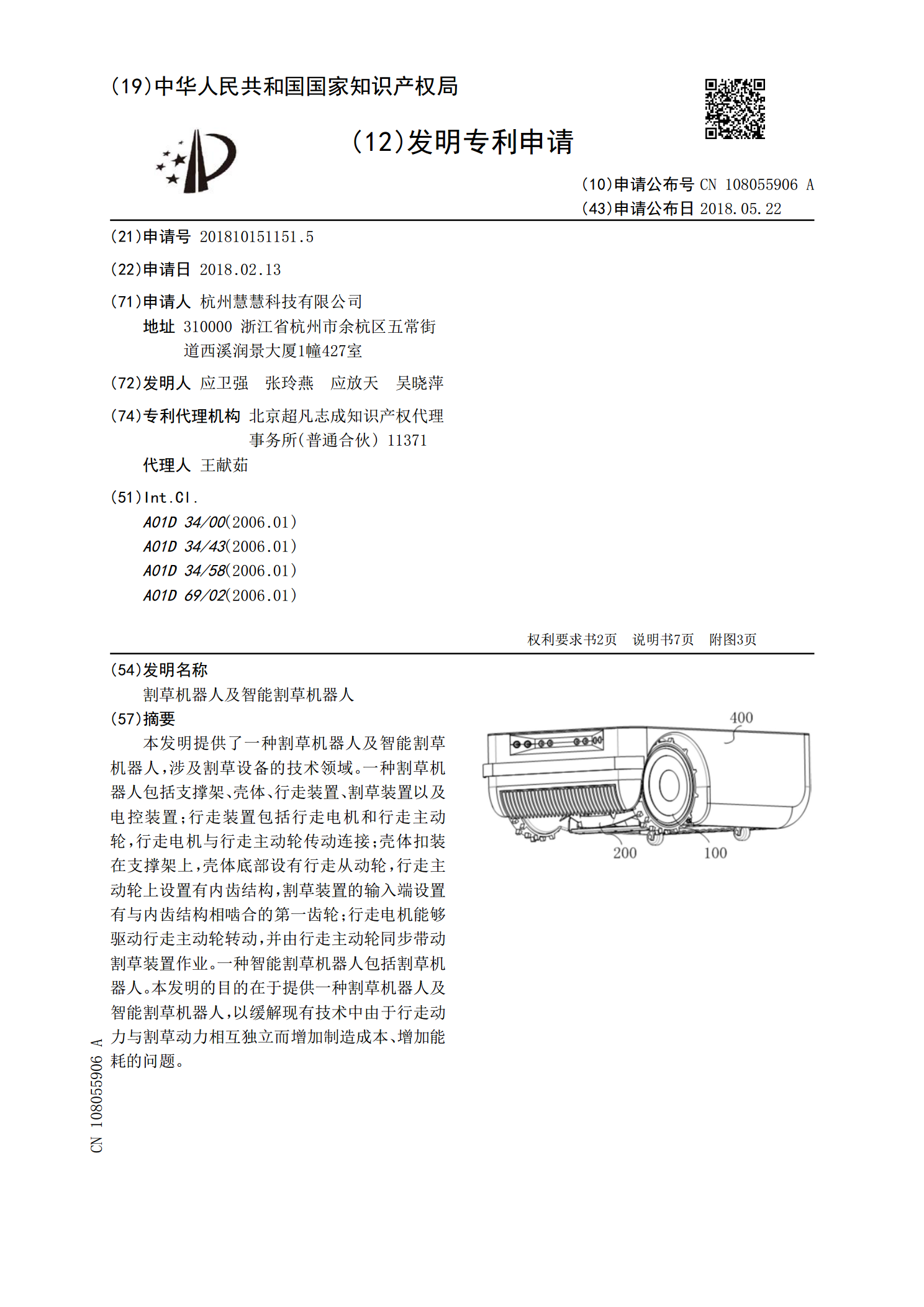
本发明提供了一种割草机器人及智能割草机器人,涉及割草设备的技术领域。一种割草机器人包括支撑架、壳体、行走装置、割草装置以及电控装置;行走装置包括行走电机和行走主动轮,行走电机与行走主动轮传动连接;壳体扣装在支撑架上,壳体底部设有行走从动轮,行走主动轮上设置有内齿结构,割草装置的输入端设置有与内齿结构相啮合的第一齿轮;行走电机能够驱动行走主动轮转动,并由行走主动轮同步带动割草装置作业。一种智能割草机器人包括割草机器人。本发明的目的在于提供一种割草机器人及智能割草机器人,以缓解现有技术中由于行走动力与割草动力