
一种基于永磁弹簧的串联可重构变刚度机器人关节结构.pdf

论文****轩吖

1/9
2/9
3/9
4/9

5/9

6/9

7/9

8/9

9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种基于永磁弹簧的串联可重构变刚度机器人关节结构.pdf
一种基于永磁弹簧的串联可重构变刚度机器人关节结构,包括基座、绳索、变刚度电机;所述基座的竖向基体一端加工成腰形盲孔,另一端加工有与腰形盲孔连通的上通孔和下通孔,下通孔内通过轴承安装有转轴Ⅰ,转轴Ⅰ一端依次连接有减速器和位置伺服电机,另一端位于腰形盲孔内部分安装有小带轮;上通孔内通过交叉滚子轴承Ⅰ与输出圆盘的轴体转动安装,且交叉滚子轴承Ⅰ的端面与输出圆盘的圆盘一端固定连接,输出圆盘的轴体位于腰形盲孔内部分安装有大带轮,在大带轮与小带轮之间安装有同步带,输出圆盘的圆盘通过交叉滚子轴承Ⅱ依次与连杆圆盘及变刚度装
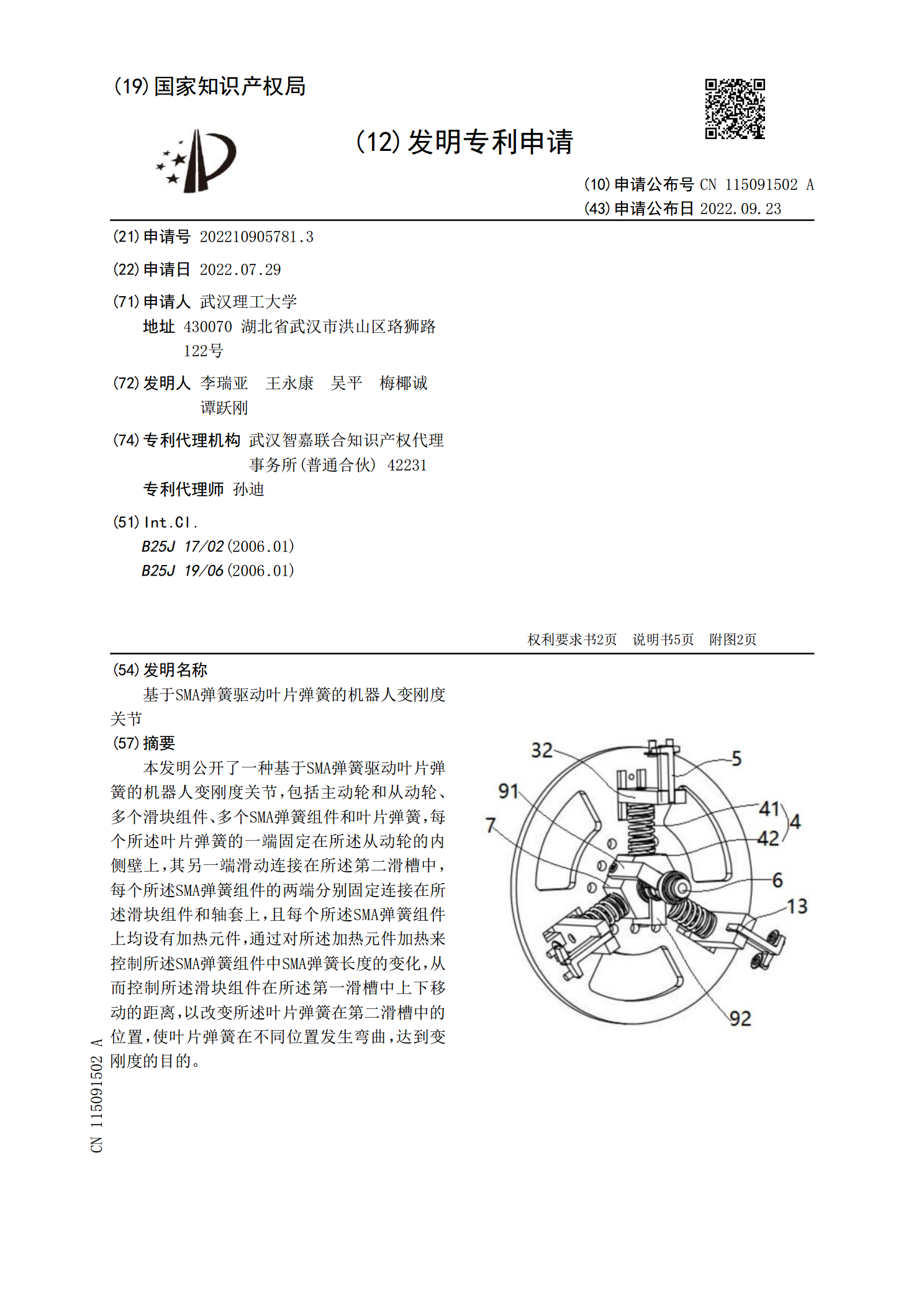
基于SMA弹簧驱动叶片弹簧的机器人变刚度关节.pdf
本发明公开了一种基于SMA弹簧驱动叶片弹簧的机器人变刚度关节,包括主动轮和从动轮、多个滑块组件、多个SMA弹簧组件和叶片弹簧,每个所述叶片弹簧的一端固定在所述从动轮的内侧壁上,其另一端滑动连接在所述第二滑槽中,每个所述SMA弹簧组件的两端分别固定连接在所述滑块组件和轴套上,且每个所述SMA弹簧组件上均设有加热元件,通过对所述加热元件加热来控制所述SMA弹簧组件中SMA弹簧长度的变化,从而控制所述滑块组件在所述第一滑槽中上下移动的距离,以改变所述叶片弹簧在第二滑槽中的位置,使叶片弹簧在不同位置发生弯曲,达到
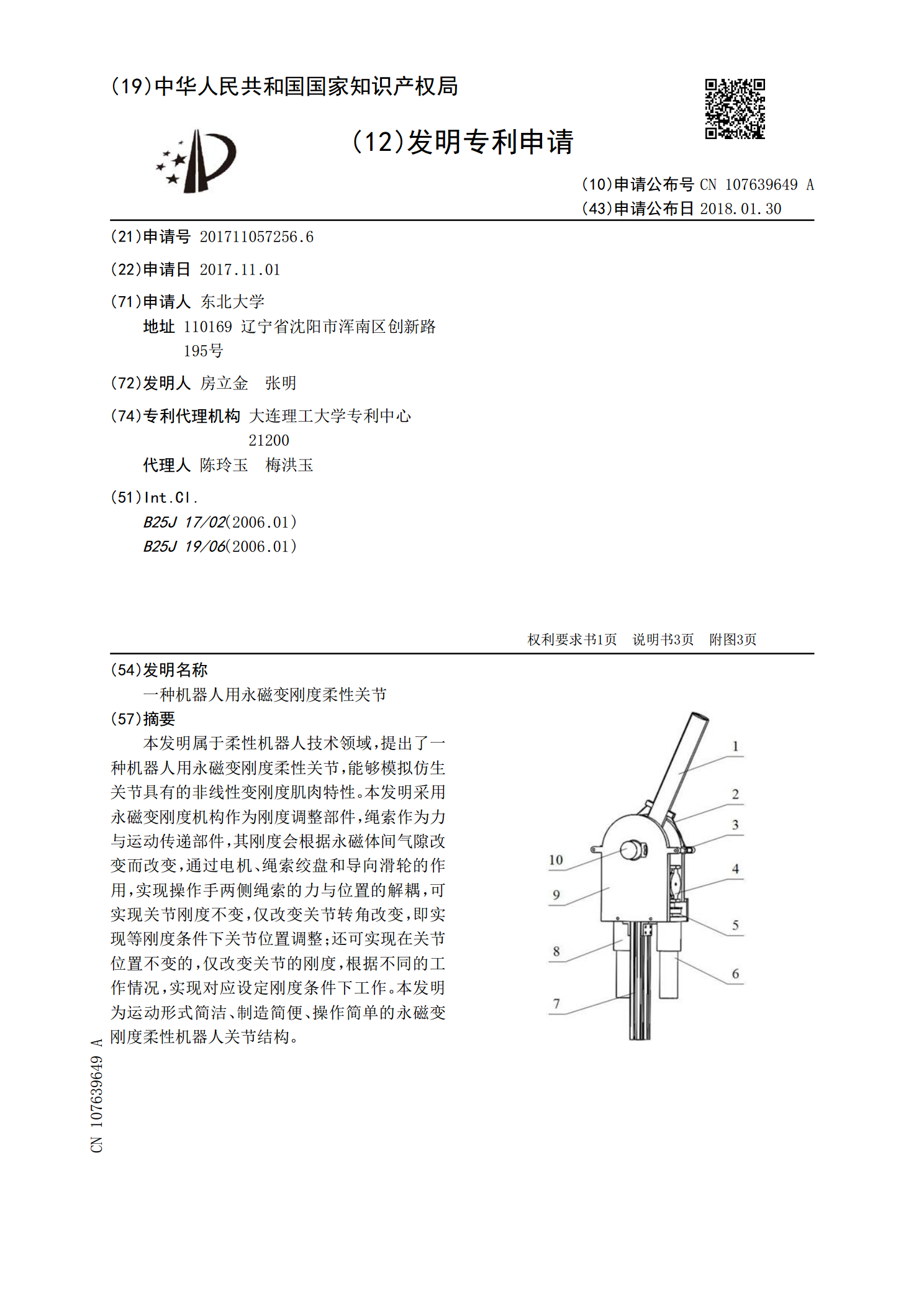
一种机器人用永磁变刚度柔性关节.pdf
本发明属于柔性机器人技术领域,提出了一种机器人用永磁变刚度柔性关节,能够模拟仿生关节具有的非线性变刚度肌肉特性。本发明采用永磁变刚度机构作为刚度调整部件,绳索作为力与运动传递部件,其刚度会根据永磁体间气隙改变而改变,通过电机、绳索绞盘和导向滑轮的作用,实现操作手两侧绳索的力与位置的解耦,可实现关节刚度不变,仅改变关节转角改变,即实现等刚度条件下关节位置调整;还可实现在关节位置不变的,仅改变关节的刚度,根据不同的工作情况,实现对应设定刚度条件下工作。本发明为运动形式简洁、制造简便、操作简单的永磁变刚度柔性机

一种基于凸轮式杠杆结构的机器人关节变刚度模块.pdf
本发明公开了一种基于凸轮式杠杆结构的机器人关节变刚度模块,包括输入部分、输出部分及刚度调节部分。刚度调节部分包括压簧、凸轮式杠杆及刚度调节支点;凸轮式杠杆绕刚度调节支点转动,且其一端与输出部分配合、另一端与压簧配合。输入部分与输出部分之间设有轴承以承受整个模块的非扭矩载荷并使输入部分与输出部分可以相对旋转。当变刚度模块的输出部分受到外部的瞬态负载时,负载经过凸轮式杠杆传递到压簧处被吸收,从而降低外部冲击、实现柔性驱动输出,同时提高机器人的鲁棒性及运行稳定性。本发明结构紧凑、成本低并集成为一个模块,因此可以

一种可级联扩展的变刚度机器人关节.pdf
本发明涉及一种可级联扩展的变刚度机器人关节,采用槽轮、钢丝和弯片弹簧组成的柔性轴盘机构提供形变力矩,利用由支撑架、涡轮蜗杆、伺服电机组成的旋转支撑机构唯一确定轴盘机构上轴对称分布的圆弧弯片弹簧的工作端点位置,进行关节刚度的高精度调节,关节的储能能力可以通过改变柔性轴盘机构的级联个数来调整,采用一种差分齿轮组机构实现机器人关节旋转、关节电机旋转、以及弹性机构旋转的耦合运动,以同时改变关节平衡位置和关节刚度,实现正反旋转刚度可调。