
基于SMA弹簧驱动叶片弹簧的机器人变刚度关节.pdf

是你****优呀

1/10

2/10

3/10
4/10
5/10
6/10

7/10

8/10
9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
基于SMA弹簧驱动叶片弹簧的机器人变刚度关节.pdf
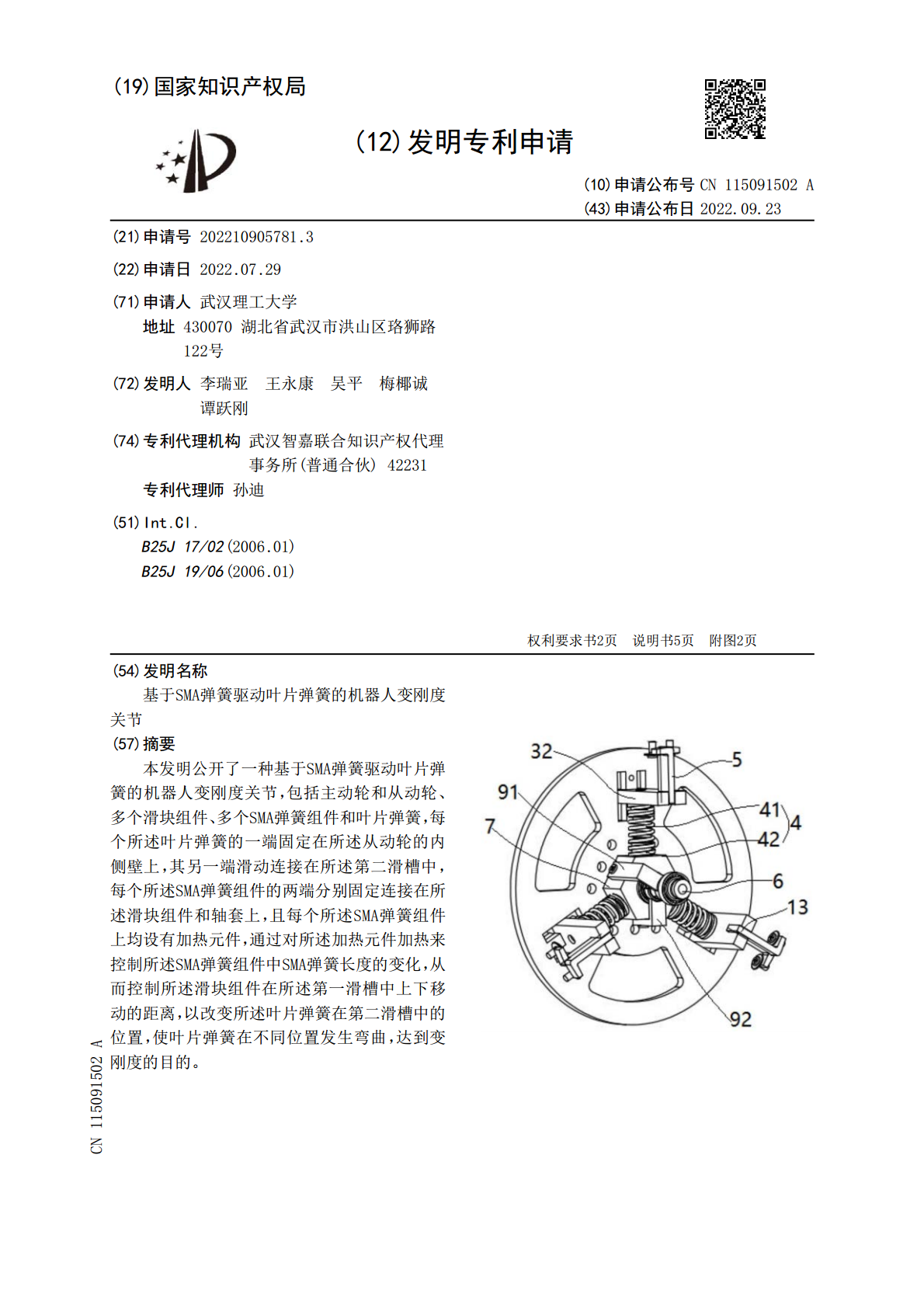
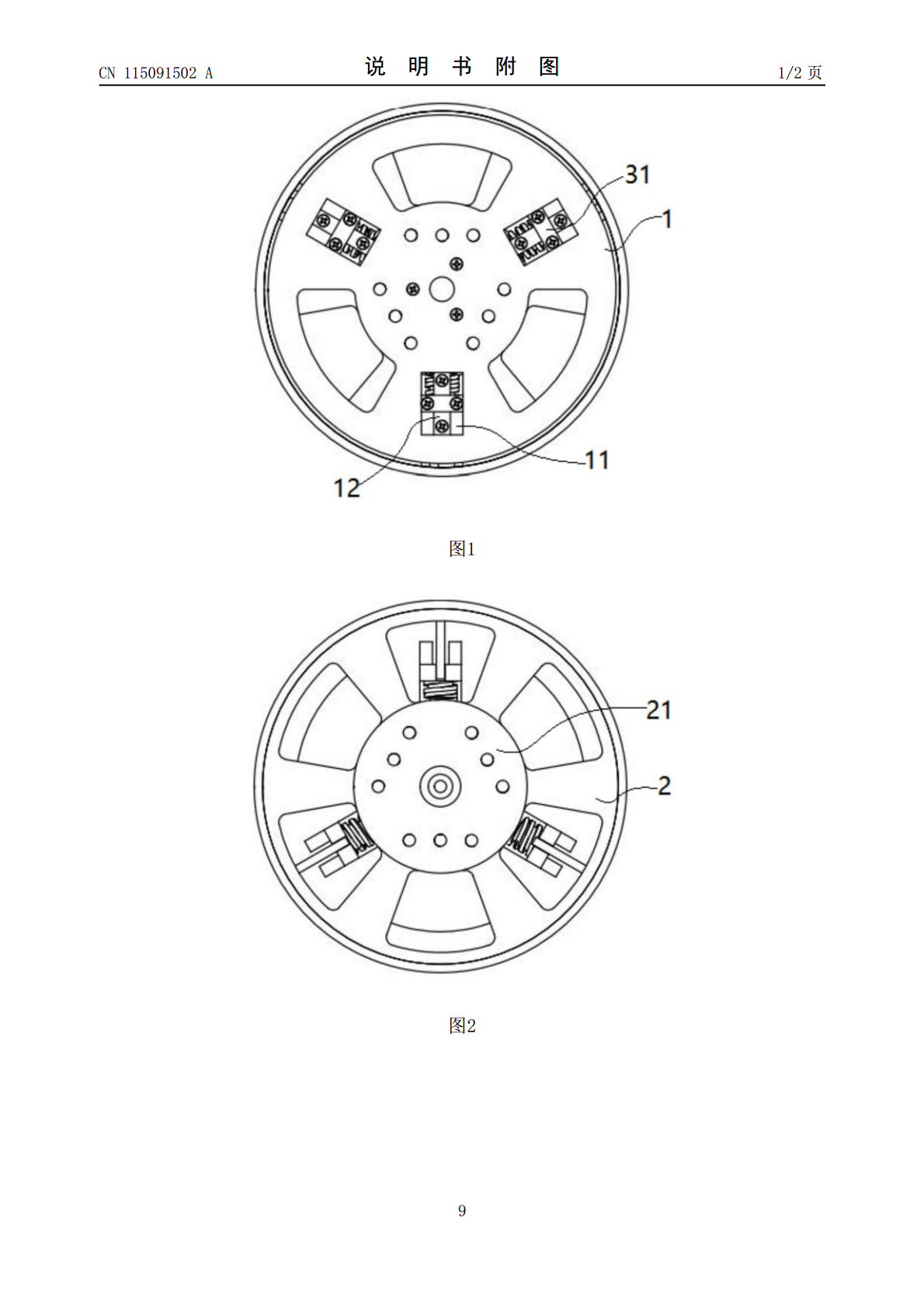
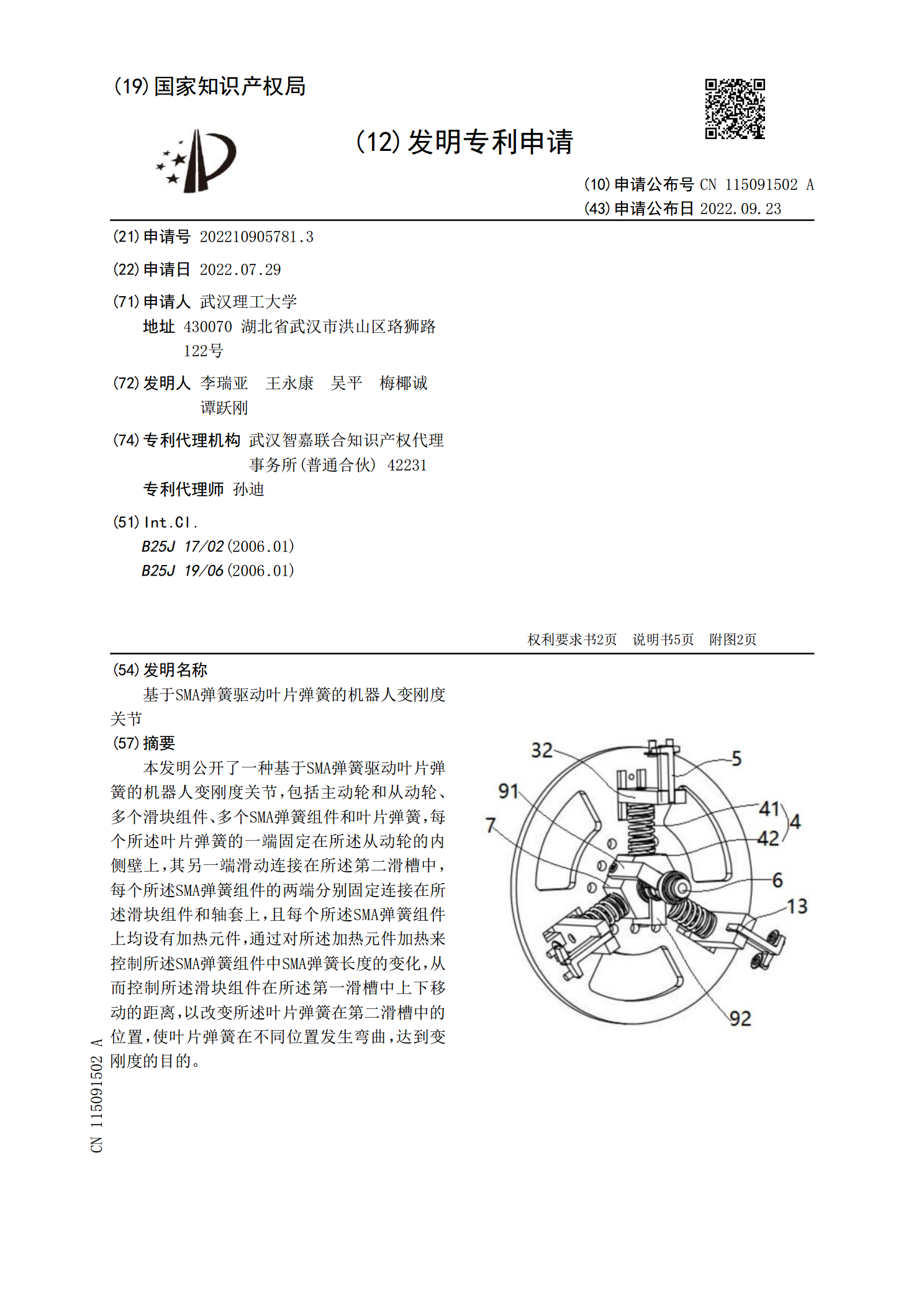
本发明公开了一种基于SMA弹簧驱动叶片弹簧的机器人变刚度关节,包括主动轮和从动轮、多个滑块组件、多个SMA弹簧组件和叶片弹簧,每个所述叶片弹簧的一端固定在所述从动轮的内侧壁上,其另一端滑动连接在所述第二滑槽中,每个所述SMA弹簧组件的两端分别固定连接在所述滑块组件和轴套上,且每个所述SMA弹簧组件上均设有加热元件,通过对所述加热元件加热来控制所述SMA弹簧组件中SMA弹簧长度的变化,从而控制所述滑块组件在所述第一滑槽中上下移动的距离,以改变所述叶片弹簧在第二滑槽中的位置,使叶片弹簧在不同位置发生弯曲,达到

基于弹簧片的变刚度关节设计与控制研究的开题报告.docx
基于弹簧片的变刚度关节设计与控制研究的开题报告一、研究背景及研究内容简介随着机器人应用场景不断扩展,如何设计出适用于各种不同场景的机器人关节机构成为了重要研究方向之一。随着多年的研究积累,利用弹簧片形变来达到变刚度关节机构的设计方案逐渐成为热门之选。对此,本研究在前人的基础上,进一步深入探究弹簧片机构在关节机构中的作用,设计并优化出适用于不同场景的变刚度关节,同时开发出相应的控制算法,以实现更加精准地控制机器人关节的运动轨迹。二、研究目的及意义本研究旨在通过探究弹簧片的机械性能及其应用于关节机构的特点,设

一种基于永磁弹簧的串联可重构变刚度机器人关节结构.pdf
一种基于永磁弹簧的串联可重构变刚度机器人关节结构,包括基座、绳索、变刚度电机;所述基座的竖向基体一端加工成腰形盲孔,另一端加工有与腰形盲孔连通的上通孔和下通孔,下通孔内通过轴承安装有转轴Ⅰ,转轴Ⅰ一端依次连接有减速器和位置伺服电机,另一端位于腰形盲孔内部分安装有小带轮;上通孔内通过交叉滚子轴承Ⅰ与输出圆盘的轴体转动安装,且交叉滚子轴承Ⅰ的端面与输出圆盘的圆盘一端固定连接,输出圆盘的轴体位于腰形盲孔内部分安装有大带轮,在大带轮与小带轮之间安装有同步带,输出圆盘的圆盘通过交叉滚子轴承Ⅱ依次与连杆圆盘及变刚度装
基于SMA驱动的扭转弹簧分离装置优化设计.pdf
龙源期刊网http://www.qikan.com.cn基于SMA驱动的扭转弹簧分离装置优化设计作者:赵守强刘凌赵天翔刘成来源:《科技创新与应用》2018年第26期摘要:在扭转弹簧分离装置中,拔销器是一个十分关键的零部件,直接影响到分离装置的使用效果。拔销器由一个偏置弹簧和一个SMA记忆合金驱动弹簧组成,偏执弹簧的作用是将SMA记忆合金驱动弹簧复位,它们在一起能够实现销子的拔出与插入。文章分析了形状记忆效应影响因素,介绍了SMA拔销器的原理,并通过润滑和公差配合等方面对扭转弹簧分离装置进行了优化设计。关键

一种基于弹簧片的可变刚度关节.docx
一种基于弹簧片的可变刚度关节基于弹簧片的可变刚度关节是一种新型的机械关节,它的刚度可以根据需求进行调节,具有较大的应用潜力。本论文将对基于弹簧片的可变刚度关节的原理、设计方法和应用进行探讨。首先,将介绍基于弹簧片的可变刚度关节的原理。弹簧片是一种具有弹性和柔性的材料,通过改变弹簧片的连接方式和角度,可以实现不同的刚度调节。当弹簧片的连接方式较紧密时,关节的刚度较高;当弹簧片的连接方式较松散时,关节的刚度较低。通过调节弹簧片连接方式的紧密程度,可以实现关节刚度的可变性。其次,将介绍基于弹簧片的可变刚度关节的