
一种基于景物听觉感知的导盲手电及导盲方法.pdf

代瑶****zy


1/10

2/10
3/10

4/10

5/10

6/10
7/10
8/10

9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种基于景物听觉感知的导盲手电及导盲方法.pdf
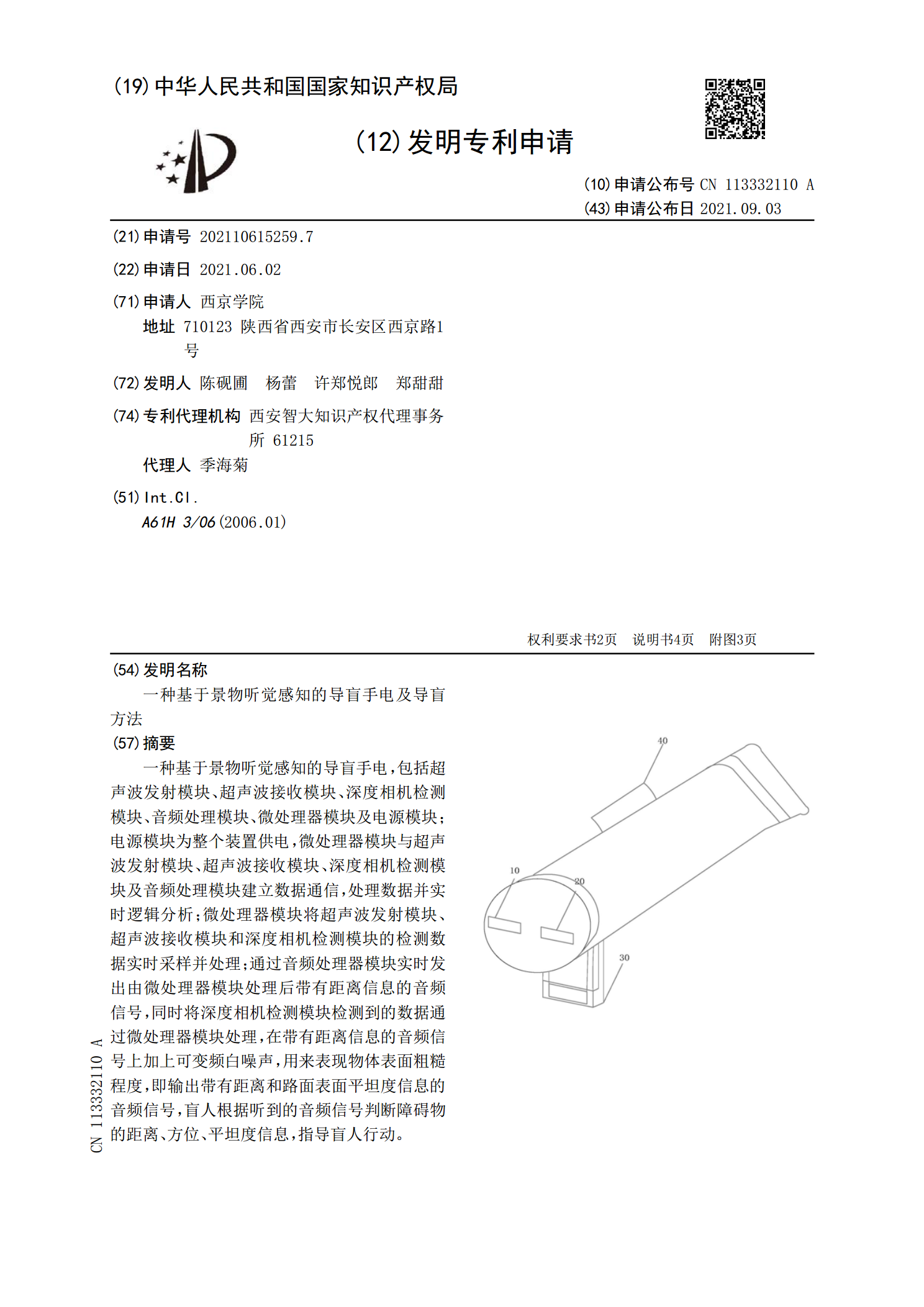
一种基于景物听觉感知的导盲手电,包括超声波发射模块、超声波接收模块、深度相机检测模块、音频处理模块、微处理器模块及电源模块;电源模块为整个装置供电,微处理器模块与超声波发射模块、超声波接收模块、深度相机检测模块及音频处理模块建立数据通信,处理数据并实时逻辑分析;微处理器模块将超声波发射模块、超声波接收模块和深度相机检测模块的检测数据实时采样并处理;通过音频处理器模块实时发出由微处理器模块处理后带有距离信息的音频信号,同时将深度相机检测模块检测到的数据通过微处理器模块处理,在带有距离信息的音频信号上加上可变
基于视听互动景观设计的感知导盲系统以及感知导盲方法.pdf
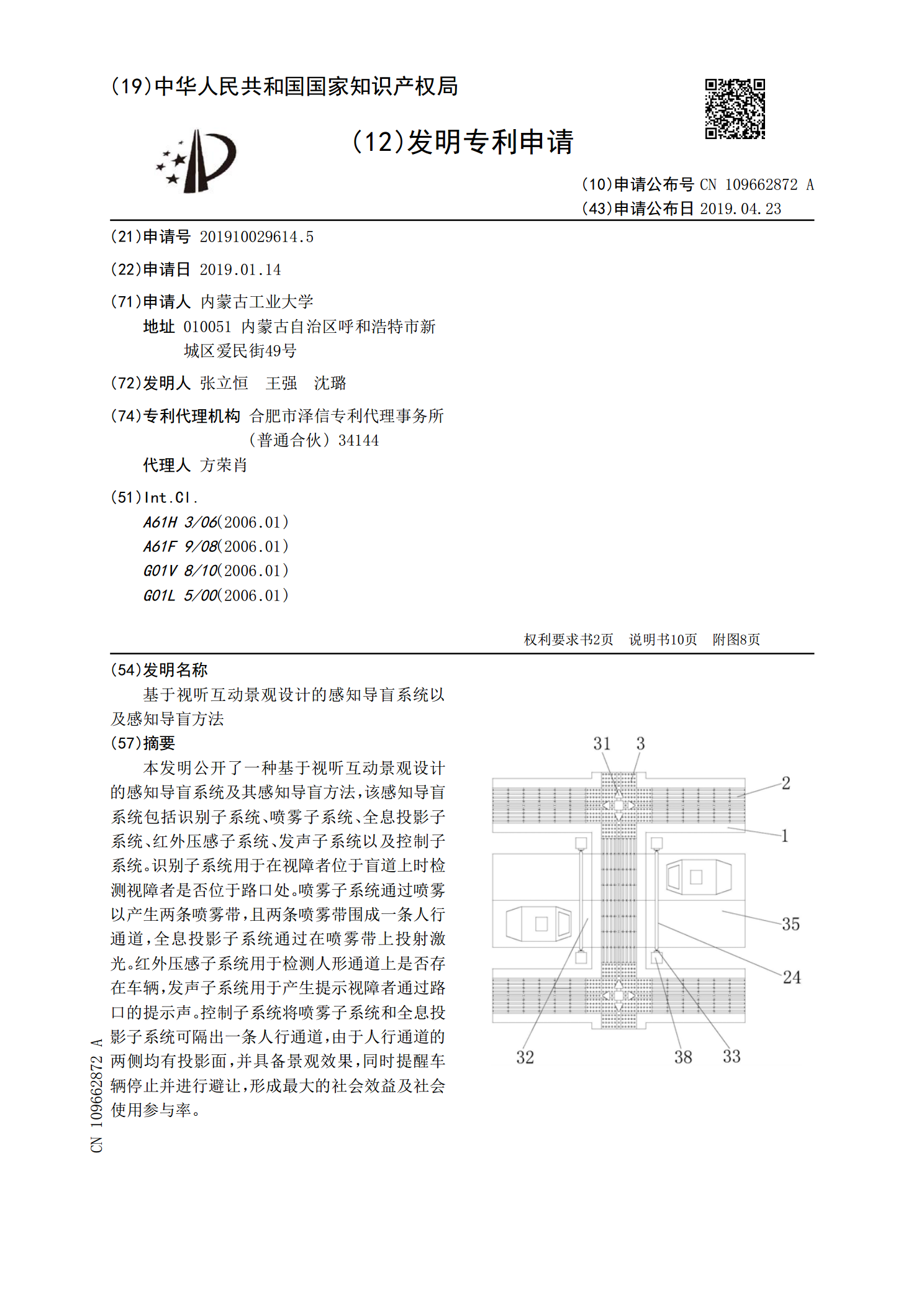
本发明公开了一种基于视听互动景观设计的感知导盲系统及其感知导盲方法,该感知导盲系统包括识别子系统、喷雾子系统、全息投影子系统、红外压感子系统、发声子系统以及控制子系统。识别子系统用于在视障者位于盲道上时检测视障者是否位于路口处。喷雾子系统通过喷雾以产生两条喷雾带,且两条喷雾带围成一条人行通道,全息投影子系统通过在喷雾带上投射激光。红外压感子系统用于检测人形通道上是否存在车辆,发声子系统用于产生提示视障者通过路口的提示声。控制子系统将喷雾子系统和全息投影子系统可隔出一条人行通道,由于人行通道的两侧均有投影面
一种基于智能盲杖的室内导盲系统及导盲方法.pdf
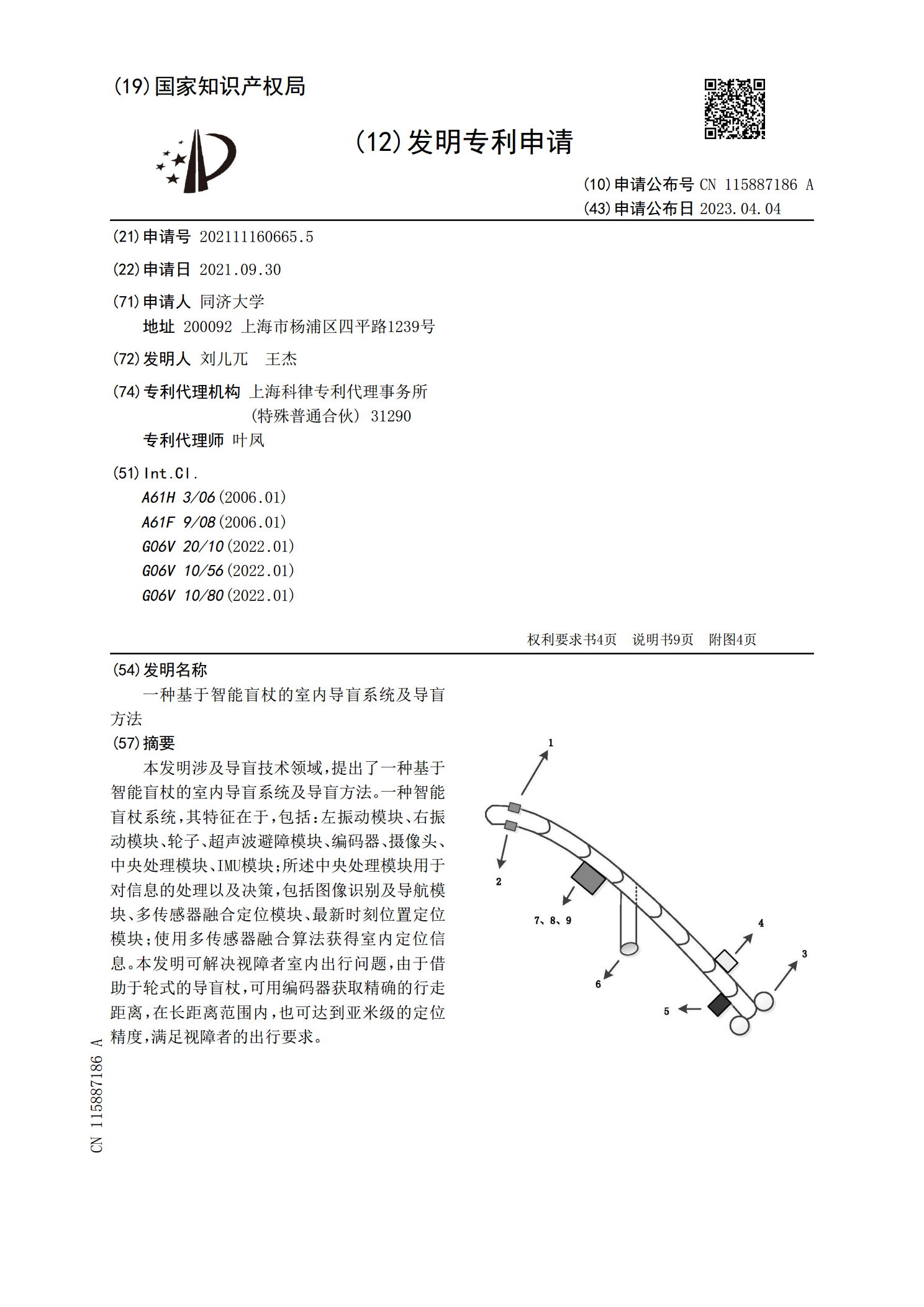
本发明涉及导盲技术领域,提出了一种基于智能盲杖的室内导盲系统及导盲方法。一种智能盲杖系统,其特征在于,包括:左振动模块、右振动模块、轮子、超声波避障模块、编码器、摄像头、中央处理模块、IMU模块;所述中央处理模块用于对信息的处理以及决策,包括图像识别及导航模块、多传感器融合定位模块、最新时刻位置定位模块;使用多传感器融合算法获得室内定位信息。本发明可解决视障者室内出行问题,由于借助于轮式的导盲杖,可用编码器获取精确的行走距离,在长距离范围内,也可达到亚米级的定位精度,满足视障者的出行要求。

一种导盲地板、导盲系统及导盲方法.pdf
本发明公开了一种可更换的带电子组件的导盲地板、导盲系统及一种导盲方法。导盲地板包括底板,多个从所述底板向上伸延的凸起物,包括至少一条管道的管道部分,所述管道位于所述底板的顶部表面并具有向上的开口,管道部分沿底板的整个长度伸延,还包括被容纳在所述管道内的电子组件。导盲系统包括至少一块导盲地板和远程装置,远程装置包括无线读取器,输入装置和输出装置。无线读取器与各导盲地板的无线装置和后端服务器通讯,并提醒用户从后端服务器获取信息。
一种导盲杖、导盲系统及导盲方法.pdf
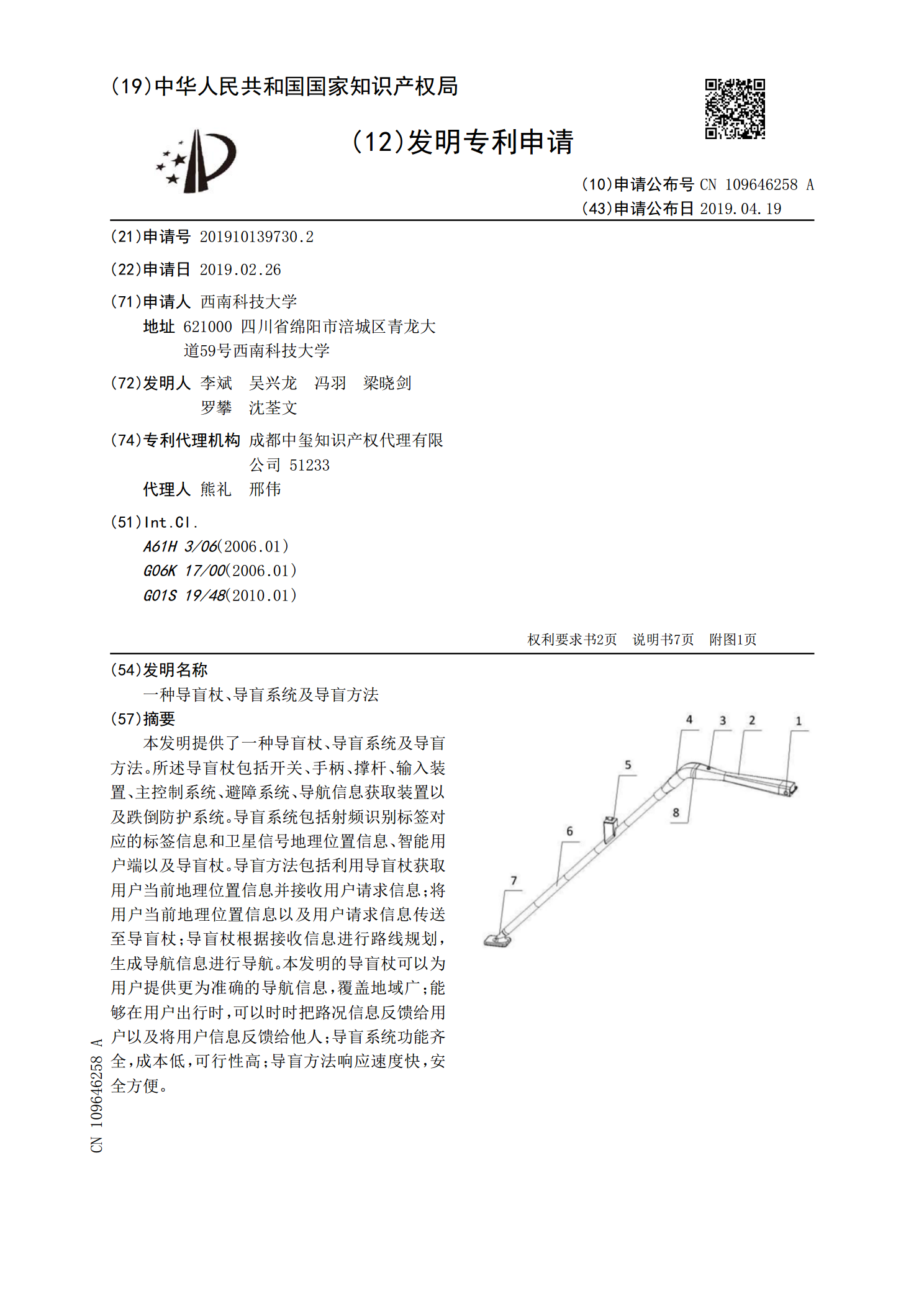
本发明提供了一种导盲杖、导盲系统及导盲方法。所述导盲杖包括开关、手柄、撑杆、输入装置、主控制系统、避障系统、导航信息获取装置以及跌倒防护系统。导盲系统包括射频识别标签对应的标签信息和卫星信号地理位置信息、智能用户端以及导盲杖。导盲方法包括利用导盲杖获取用户当前地理位置信息并接收用户请求信息;将用户当前地理位置信息以及用户请求信息传送至导盲杖;导盲杖根据接收信息进行路线规划,生成导航信息进行导航。本发明的导盲杖可以为用户提供更为准确的导航信息,覆盖地域广;能够在用户出行时,可以时时把路况信息反馈给用户以及将