
一种基于智能盲杖的室内导盲系统及导盲方法.pdf

一吃****永贺


1/10
2/10

3/10

4/10

5/10

6/10

7/10
8/10

9/10

10/10
亲,该文档总共18页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于智能盲杖的室内导盲系统及导盲方法.pdf
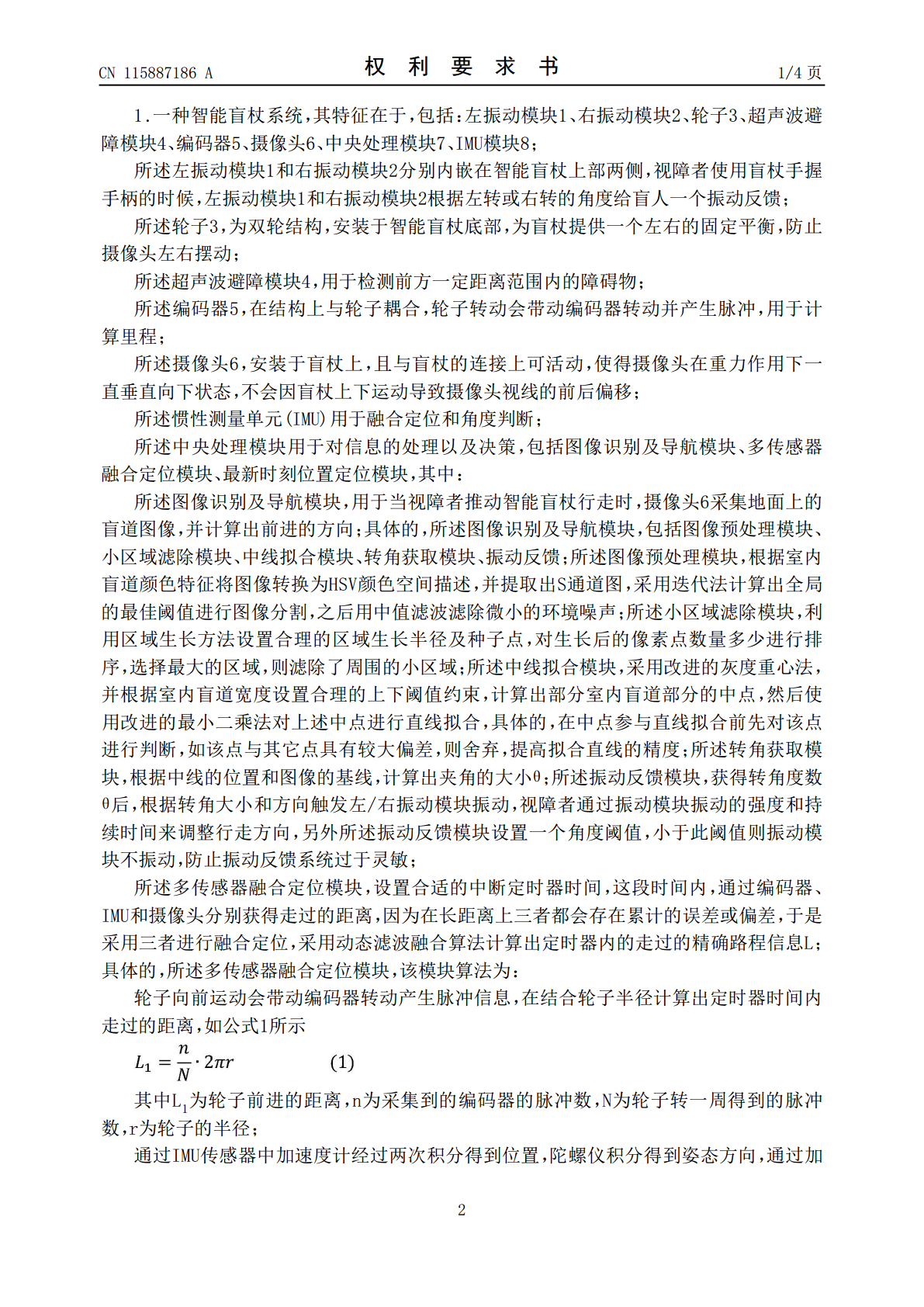
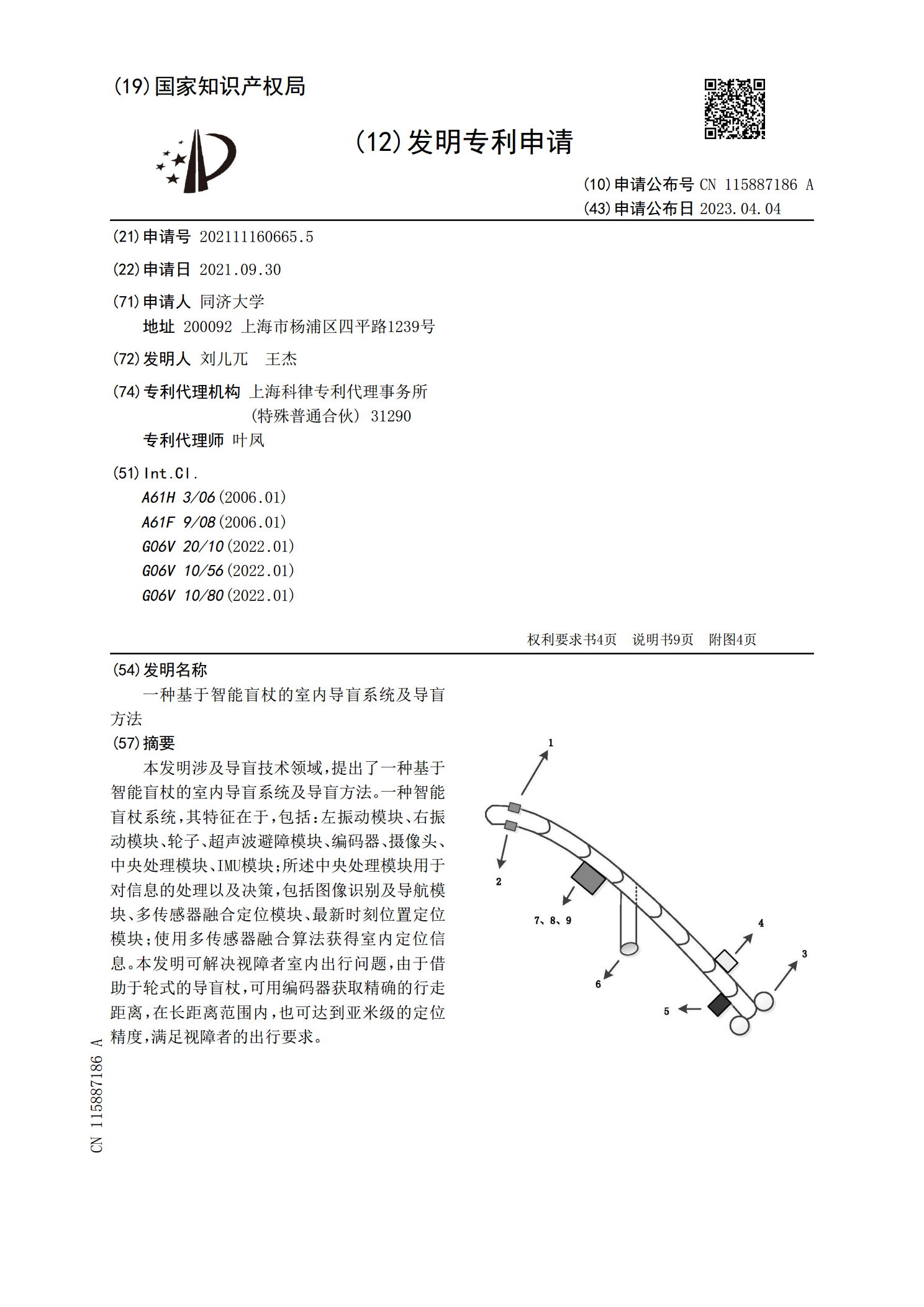
本发明涉及导盲技术领域,提出了一种基于智能盲杖的室内导盲系统及导盲方法。一种智能盲杖系统,其特征在于,包括:左振动模块、右振动模块、轮子、超声波避障模块、编码器、摄像头、中央处理模块、IMU模块;所述中央处理模块用于对信息的处理以及决策,包括图像识别及导航模块、多传感器融合定位模块、最新时刻位置定位模块;使用多传感器融合算法获得室内定位信息。本发明可解决视障者室内出行问题,由于借助于轮式的导盲杖,可用编码器获取精确的行走距离,在长距离范围内,也可达到亚米级的定位精度,满足视障者的出行要求。
一种智能导盲杖及导盲系统.pdf
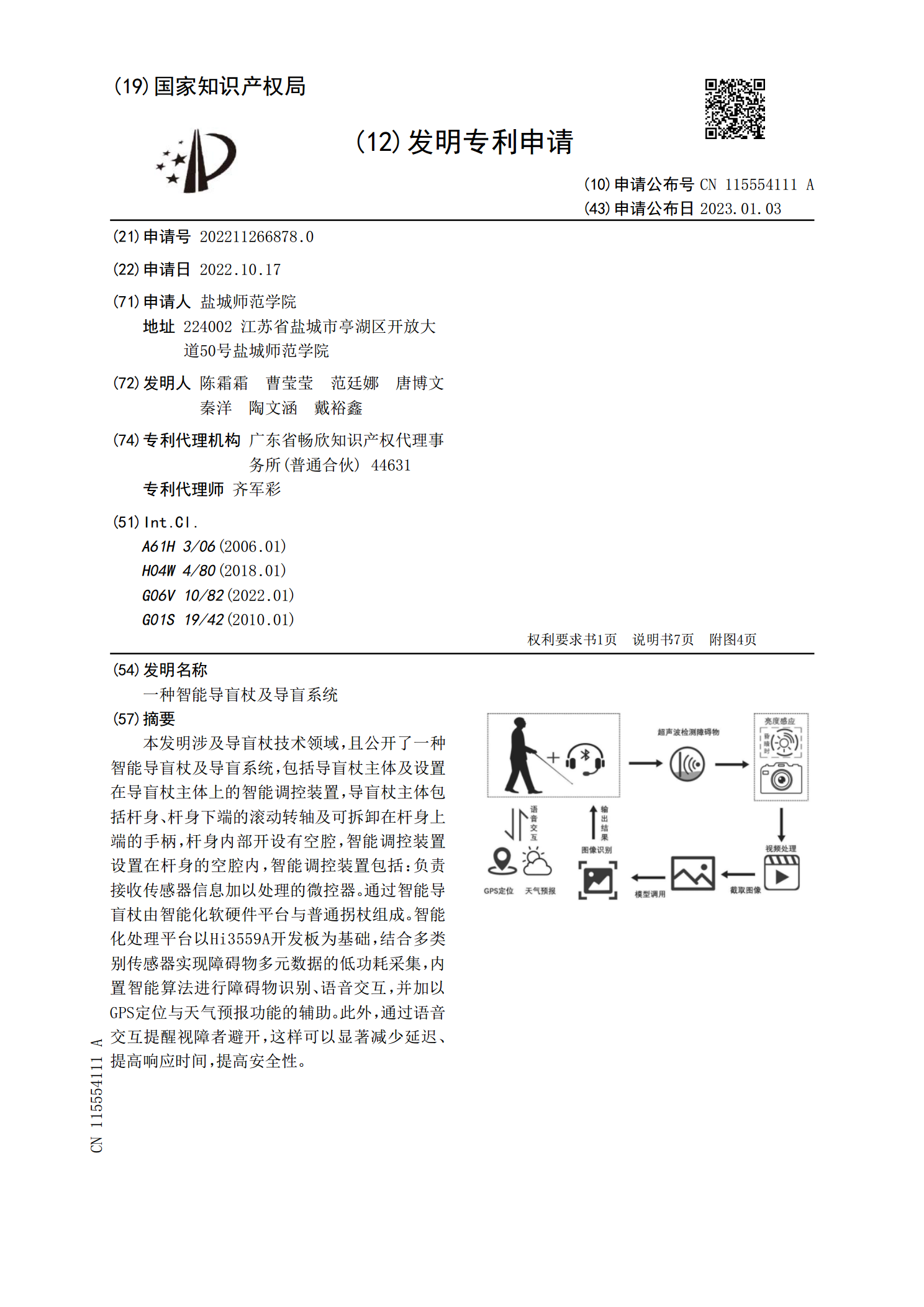
本发明涉及导盲杖技术领域,且公开了一种智能导盲杖及导盲系统,包括导盲杖主体及设置在导盲杖主体上的智能调控装置,导盲杖主体包括杆身、杆身下端的滚动转轴及可拆卸在杆身上端的手柄,杆身内部开设有空腔,智能调控装置设置在杆身的空腔内,智能调控装置包括:负责接收传感器信息加以处理的微控器。通过智能导盲杖由智能化软硬件平台与普通拐杖组成。智能化处理平台以Hi3559A开发板为基础,结合多类别传感器实现障碍物多元数据的低功耗采集,内置智能算法进行障碍物识别、语音交互,并加以GPS定位与天气预报功能的辅助。此外,通过语音

一种智能导盲杖及导盲系统.pdf
本发明公开了一种智能导盲杖及导盲系统,智能导盲杖包括导盲杖基体及设置在导盲杖基体上的智能辅助装置,所述智能辅助装置包括中央处理器、卫星定位模块、网络通信模块、震动提醒模块、声光警示模块、电子标签接收器、超声波传感器、热释红外传感器、激光传感器和交通信号接收模块,导盲系统包括智能导盲杖、电子标签、移动终端和云服务器。通过上述方式,本发明所述的智能导盲杖及导盲系统,无需铺设盲道,在室内或者特定道路上设置电子标签,与智能导盲杖配合使用,直接引导盲人行动,有利于盲人独自出行,而且家人可以利用移动终端通过云服务器监
一种导盲杖、导盲系统及导盲方法.pdf
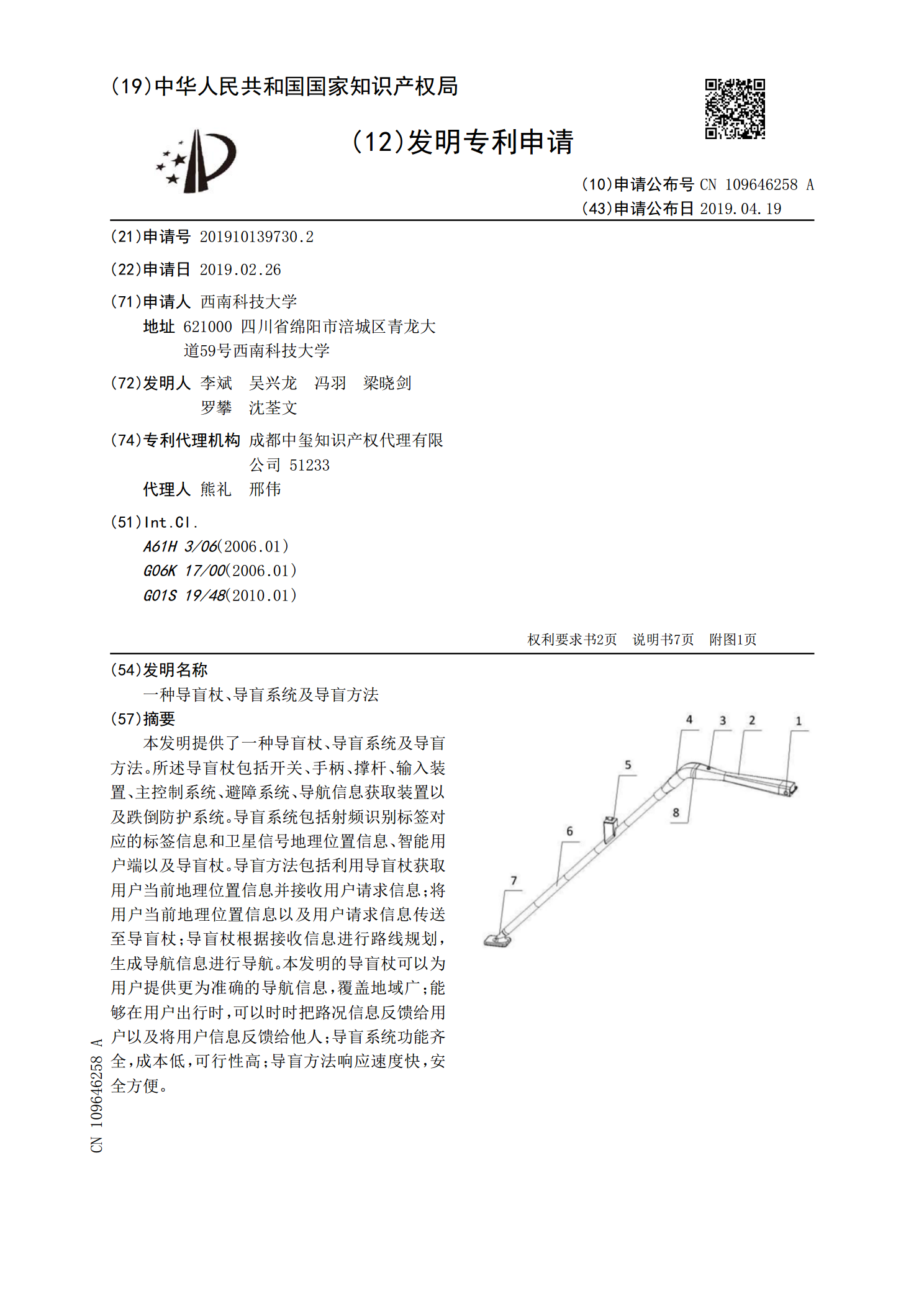
本发明提供了一种导盲杖、导盲系统及导盲方法。所述导盲杖包括开关、手柄、撑杆、输入装置、主控制系统、避障系统、导航信息获取装置以及跌倒防护系统。导盲系统包括射频识别标签对应的标签信息和卫星信号地理位置信息、智能用户端以及导盲杖。导盲方法包括利用导盲杖获取用户当前地理位置信息并接收用户请求信息;将用户当前地理位置信息以及用户请求信息传送至导盲杖;导盲杖根据接收信息进行路线规划,生成导航信息进行导航。本发明的导盲杖可以为用户提供更为准确的导航信息,覆盖地域广;能够在用户出行时,可以时时把路况信息反馈给用户以及将

一种智能导盲杖及其导盲方法.pdf
本发明公开一种智能导盲杖及其导盲方法,包括把手部、连接于把手部一端的伸缩部以及连接于伸缩部一端的触地部;所述把手部设有控制模块、超声波测距模块以及震动模块,所述控制模块与超声波测距模块电性连接,所述震动模块与控制模块电性连接。本发明通过超声波测距可以远距离探测使用者行走路径周围是否存在障碍物;当探测到障碍物时,可以通过震动的方式及时反馈给使用者,提醒使用者进行躲避;当出现应急情况时,可以通过拨号呼叫进行紧急呼叫,及时有效地联系家人。