
点云数据的处理方法、装置、存储介质及激光雷达系统.pdf

梦影****主a

1/1
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
点云数据的处理方法、装置、存储介质及激光雷达系统.pdf
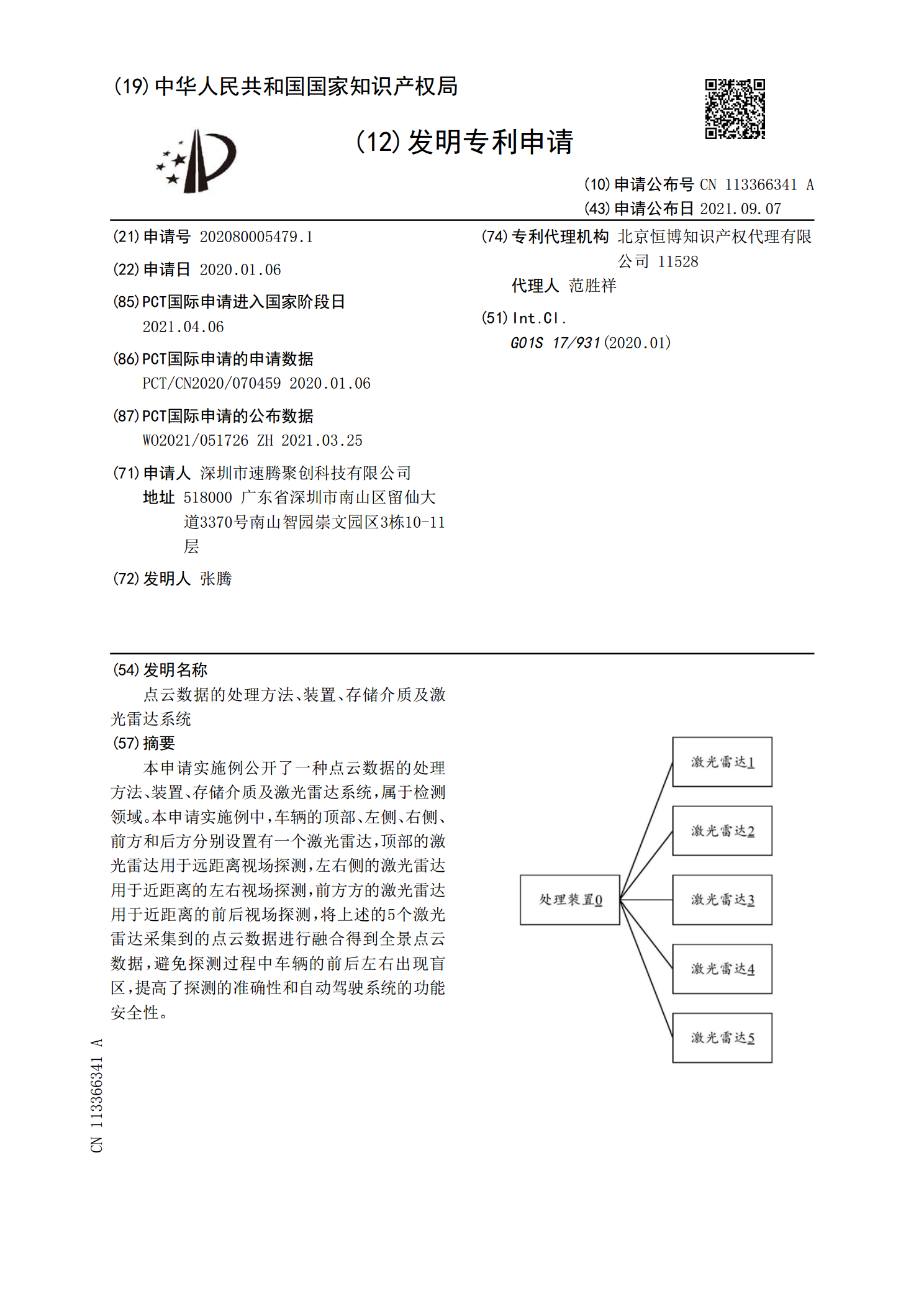
本申请实施例公开了一种点云数据的处理方法、装置、存储介质及激光雷达系统,属于检测领域。本申请实施例中,车辆的顶部、左侧、右侧、前方和后方分别设置有一个激光雷达,顶部的激光雷达用于远距离视场探测,左右侧的激光雷达用于近距离的左右视场探测,前方方的激光雷达用于近距离的前后视场探测,将上述的5个激光雷达采集到的点云数据进行融合得到全景点云数据,避免探测过程中车辆的前后左右出现盲区,提高了探测的准确性和自动驾驶系统的功能安全性。

用于激光雷达的点云处理方法及装置、存储介质.pdf
本申请公开了一种用于激光雷达的点云处理方法及装置、存储介质,所述方法包括:根据预设的角度范围以及分辨率,将激光雷达的点云划分为不同的栅格;遍历每个栅格内的所有点,获取栅格内最近点以及最远点,计算所述最远点和所述最近点的距离差值,在所述距离差值大于设定阈值的情况下,进行粘连点处理;所述粘连点处理包括:保留栅格内最近点以及最远点的一定距离范围内的点,将其余的点确定为粘连点;将所述粘连点删除。本申请处理后的点云数据更合理,能准确对障碍物进行避让,大大方便了自动驾驶中的路径规划,保证了行车安全。

用于激光雷达的点云处理方法及装置、存储介质.pdf
本申请公开了一种用于激光雷达的点云处理方法及装置、存储介质,所述方法包括:根据预设的角度范围以及分辨率,将激光雷达的点云划分为不同的栅格;遍历每个栅格内的所有点,获取栅格内最近点以及最远点,进行粘连点处理;所述粘连点处理包括:保留栅格内最近点以及最远点的一定距离范围内的点,将其余的点确定为粘连点;将所述粘连点删除。本申请处理后的点云数据更合理,能准确对障碍物进行避让,大大方便了自动驾驶中的路径规划,保证了行车安全。
点云数据处理方法、装置、存储介质及电子装置.pdf
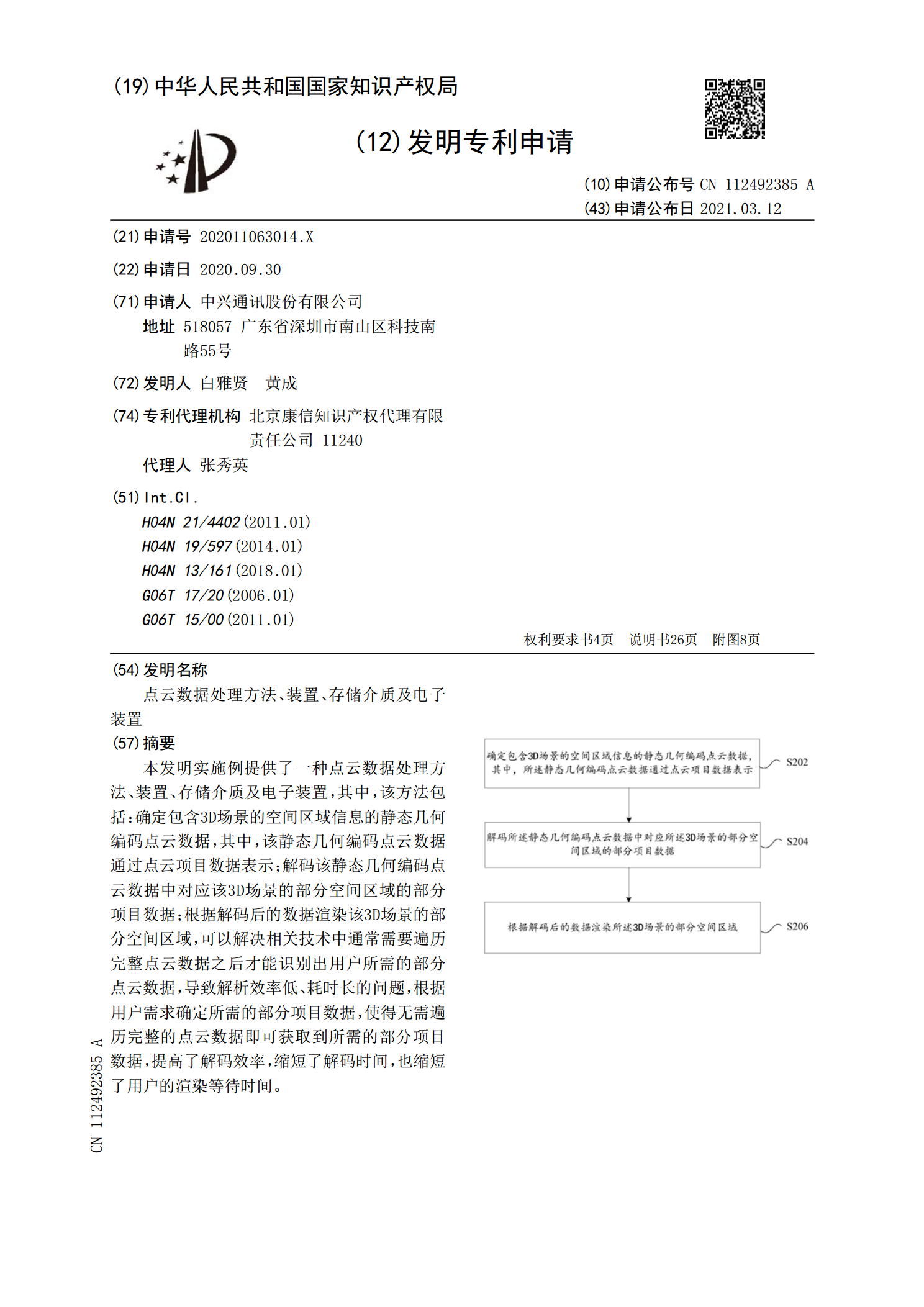
本发明实施例提供了一种点云数据处理方法、装置、存储介质及电子装置,其中,该方法包括:确定包含3D场景的空间区域信息的静态几何编码点云数据,其中,该静态几何编码点云数据通过点云项目数据表示;解码该静态几何编码点云数据中对应该3D场景的部分空间区域的部分项目数据;根据解码后的数据渲染该3D场景的部分空间区域,可以解决相关技术中通常需要遍历完整点云数据之后才能识别出用户所需的部分点云数据,导致解析效率低、耗时长的问题,根据用户需求确定所需的部分项目数据,使得无需遍历完整的点云数据即可获取到所需的部分项目数据,提
点云数据的处理及渲染方法、装置、设备及存储介质.pdf
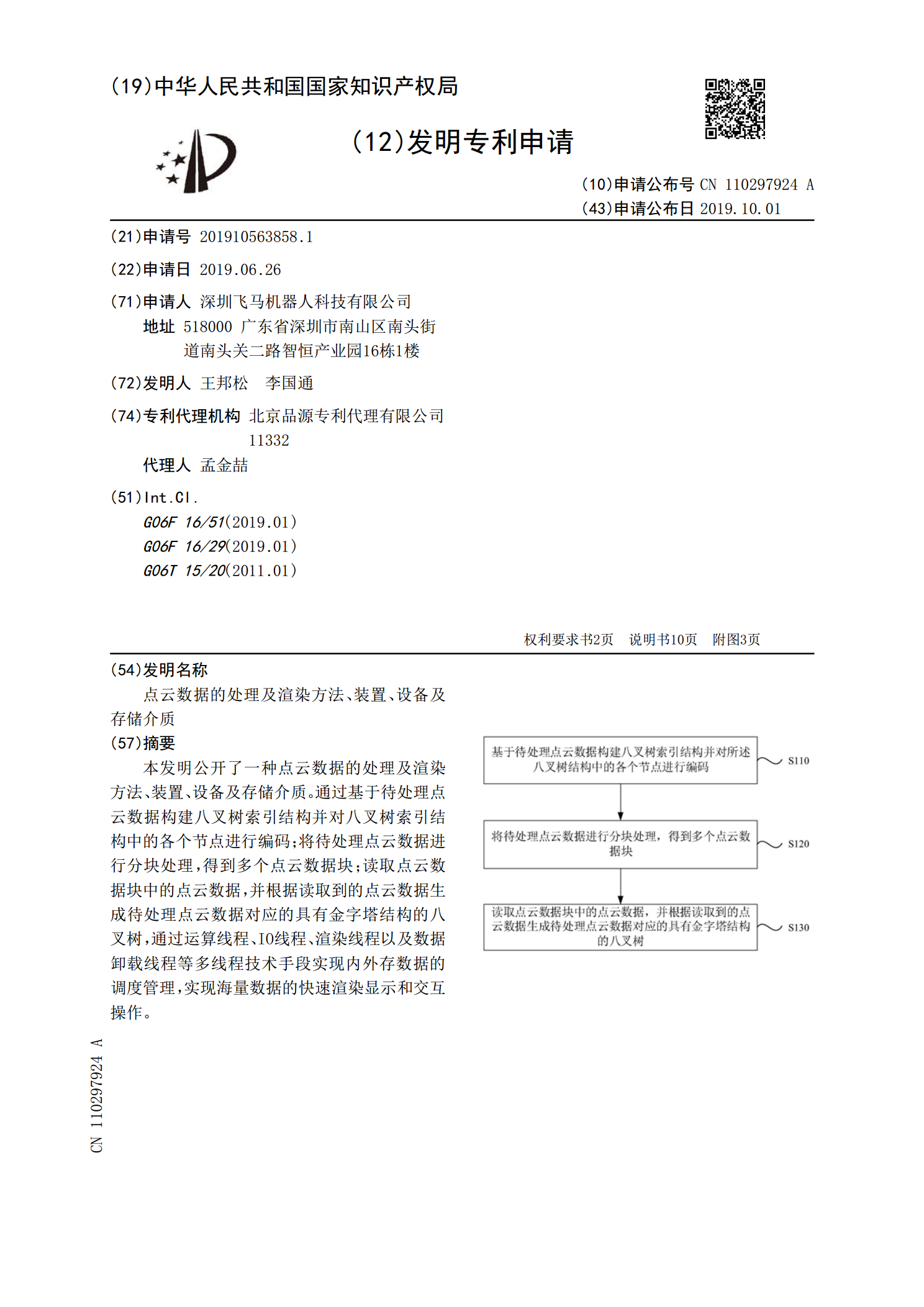
本发明公开了一种点云数据的处理及渲染方法、装置、设备及存储介质。通过基于待处理点云数据构建八叉树索引结构并对八叉树索引结构中的各个节点进行编码;将待处理点云数据进行分块处理,得到多个点云数据块;读取点云数据块中的点云数据,并根据读取到的点云数据生成待处理点云数据对应的具有金字塔结构的八叉树,通过运算线程、IO线程、渲染线程以及数据卸载线程等多线程技术手段实现内外存数据的调度管理,实现海量数据的快速渲染显示和交互操作。