
一种透明A柱的智能显示系统及方法.pdf

Ro****44

1/10
2/10

3/10
4/10
5/10
6/10
7/10
8/10
9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种透明A柱的智能显示系统及方法.pdf
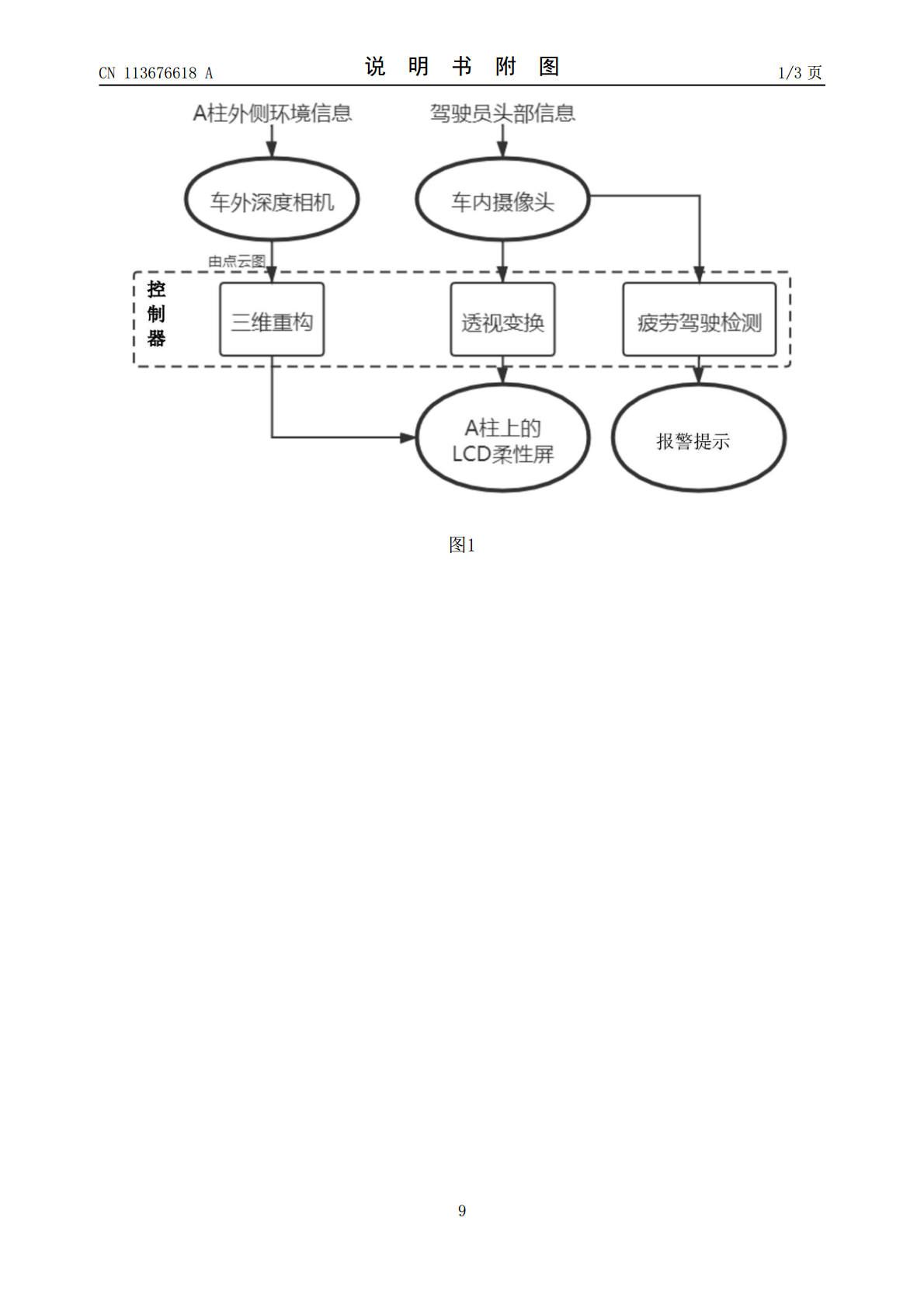
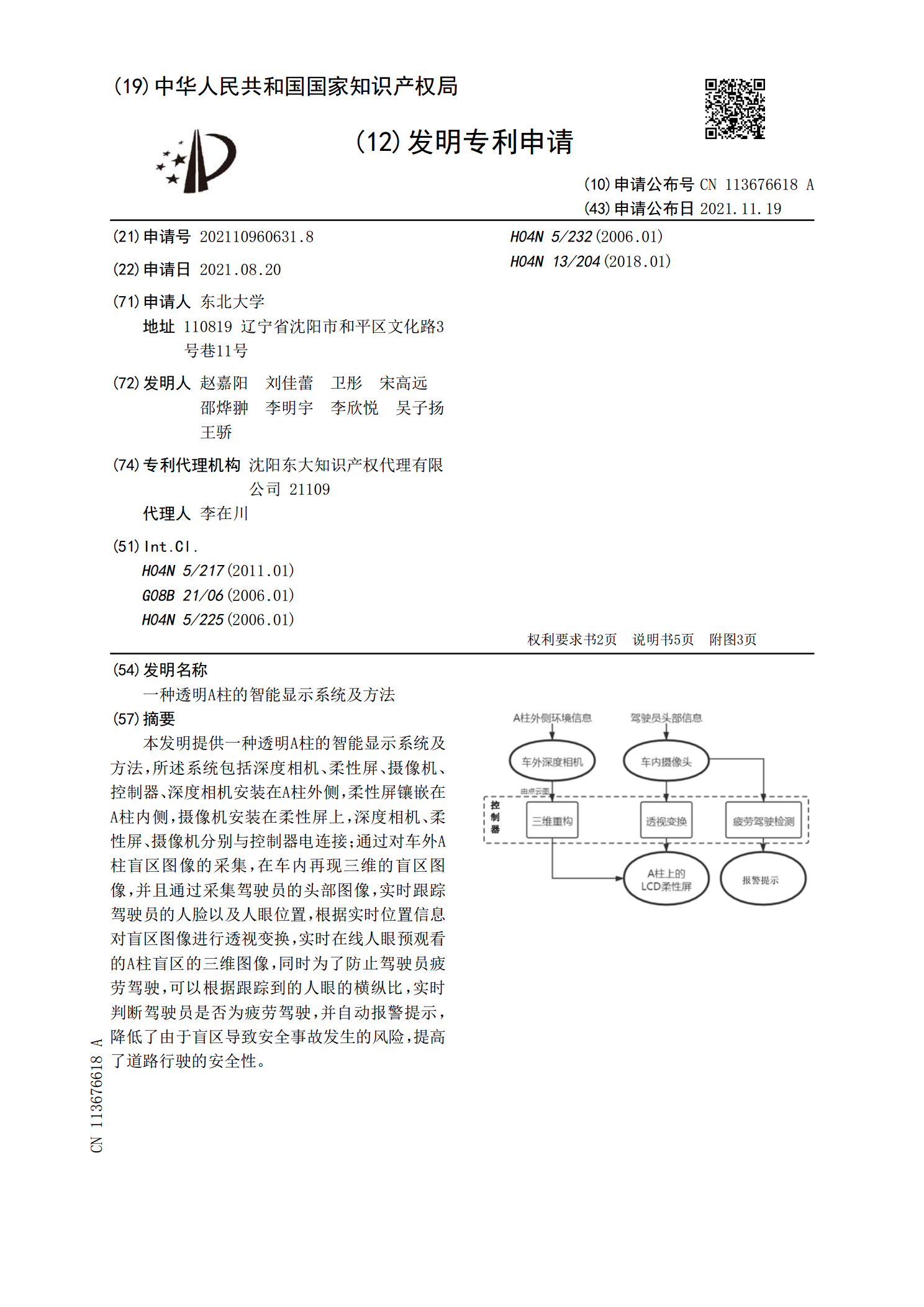
本发明提供一种透明A柱的智能显示系统及方法,所述系统包括深度相机、柔性屏、摄像机、控制器、深度相机安装在A柱外侧,柔性屏镶嵌在A柱内侧,摄像机安装在柔性屏上,深度相机、柔性屏、摄像机分别与控制器电连接;通过对车外A柱盲区图像的采集,在车内再现三维的盲区图像,并且通过采集驾驶员的头部图像,实时跟踪驾驶员的人脸以及人眼位置,根据实时位置信息对盲区图像进行透视变换,实时在线人眼预观看的A柱盲区的三维图像,同时为了防止驾驶员疲劳驾驶,可以根据跟踪到的人眼的横纵比,实时判断驾驶员是否为疲劳驾驶,并自动报警提示,降低
一种汽车透明A柱显示系统.pdf
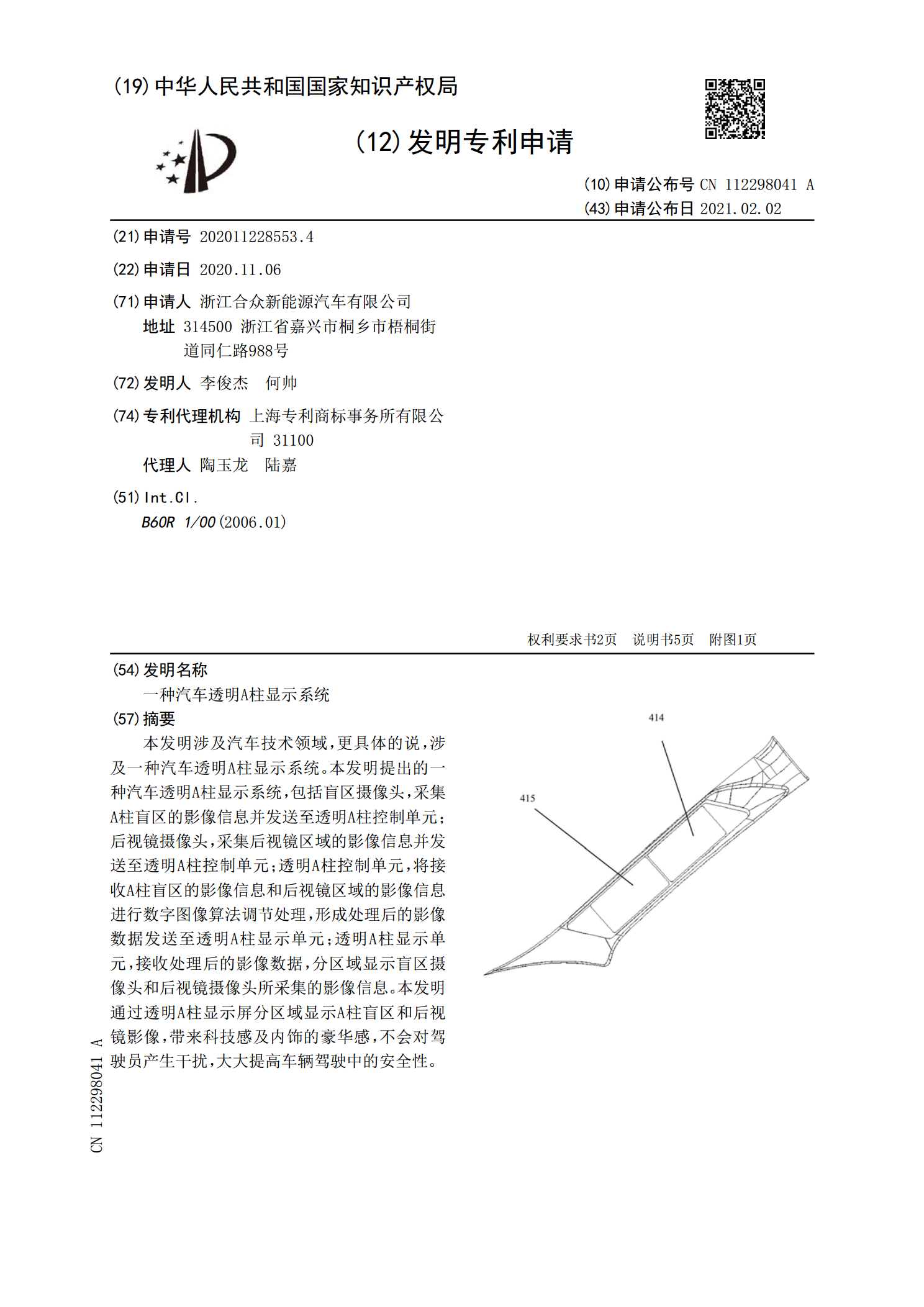
本发明涉及汽车技术领域,更具体的说,涉及一种汽车透明A柱显示系统。本发明提出的一种汽车透明A柱显示系统,包括盲区摄像头,采集A柱盲区的影像信息并发送至透明A柱控制单元;后视镜摄像头,采集后视镜区域的影像信息并发送至透明A柱控制单元;透明A柱控制单元,将接收A柱盲区的影像信息和后视镜区域的影像信息进行数字图像算法调节处理,形成处理后的影像数据发送至透明A柱显示单元;透明A柱显示单元,接收处理后的影像数据,分区域显示盲区摄像头和后视镜摄像头所采集的影像信息。本发明通过透明A柱显示屏分区域显示A柱盲区和后视镜影
基于透明A柱的盲区显示方法及装置.pdf
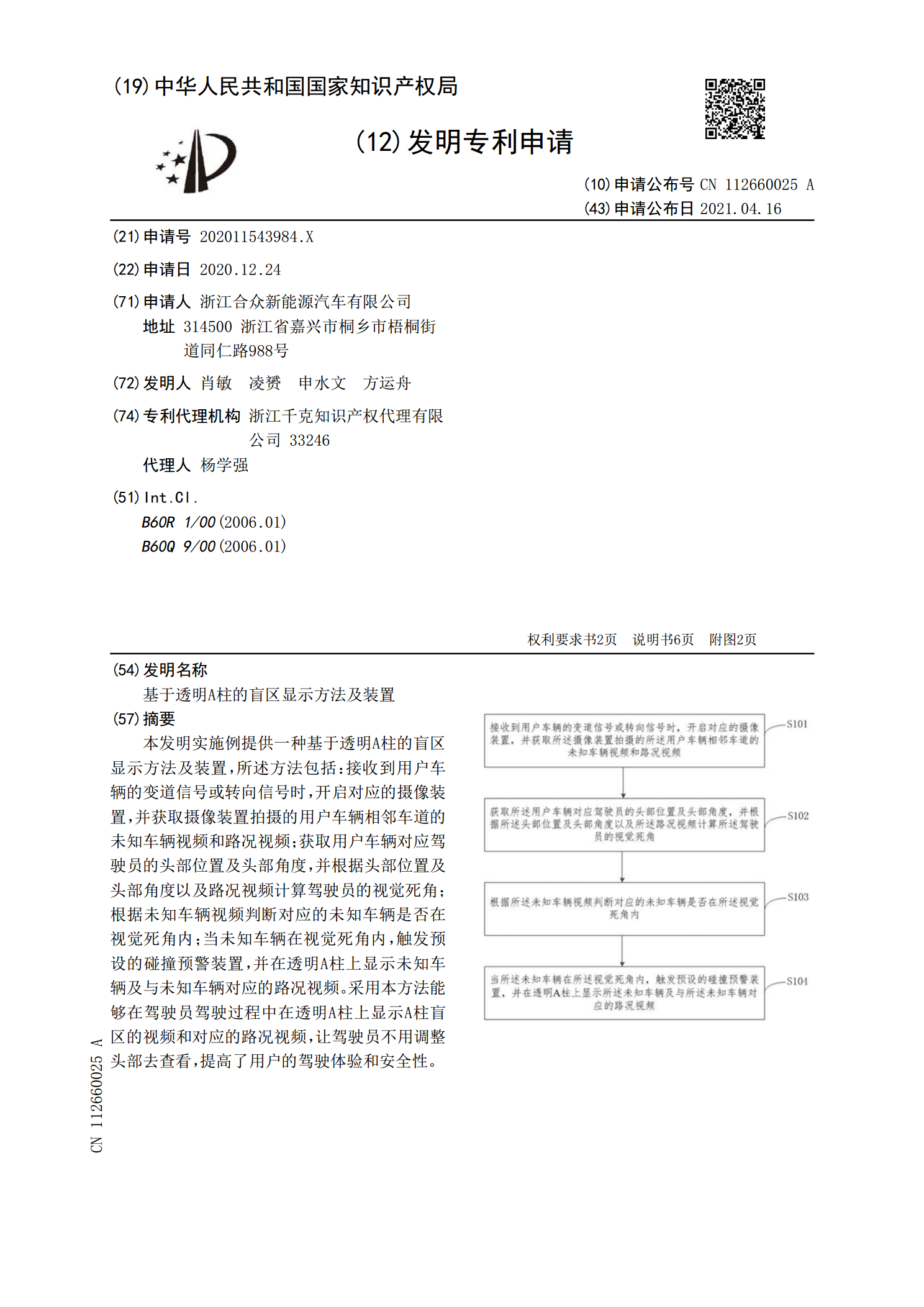
本发明实施例提供一种基于透明A柱的盲区显示方法及装置,所述方法包括:接收到用户车辆的变道信号或转向信号时,开启对应的摄像装置,并获取摄像装置拍摄的用户车辆相邻车道的未知车辆视频和路况视频;获取用户车辆对应驾驶员的头部位置及头部角度,并根据头部位置及头部角度以及路况视频计算驾驶员的视觉死角;根据未知车辆视频判断对应的未知车辆是否在视觉死角内;当未知车辆在视觉死角内,触发预设的碰撞预警装置,并在透明A柱上显示未知车辆及与未知车辆对应的路况视频。采用本方法能够在驾驶员驾驶过程中在透明A柱上显示A柱盲区的视频和对
一种透明A柱的自适应方法及系统.pdf
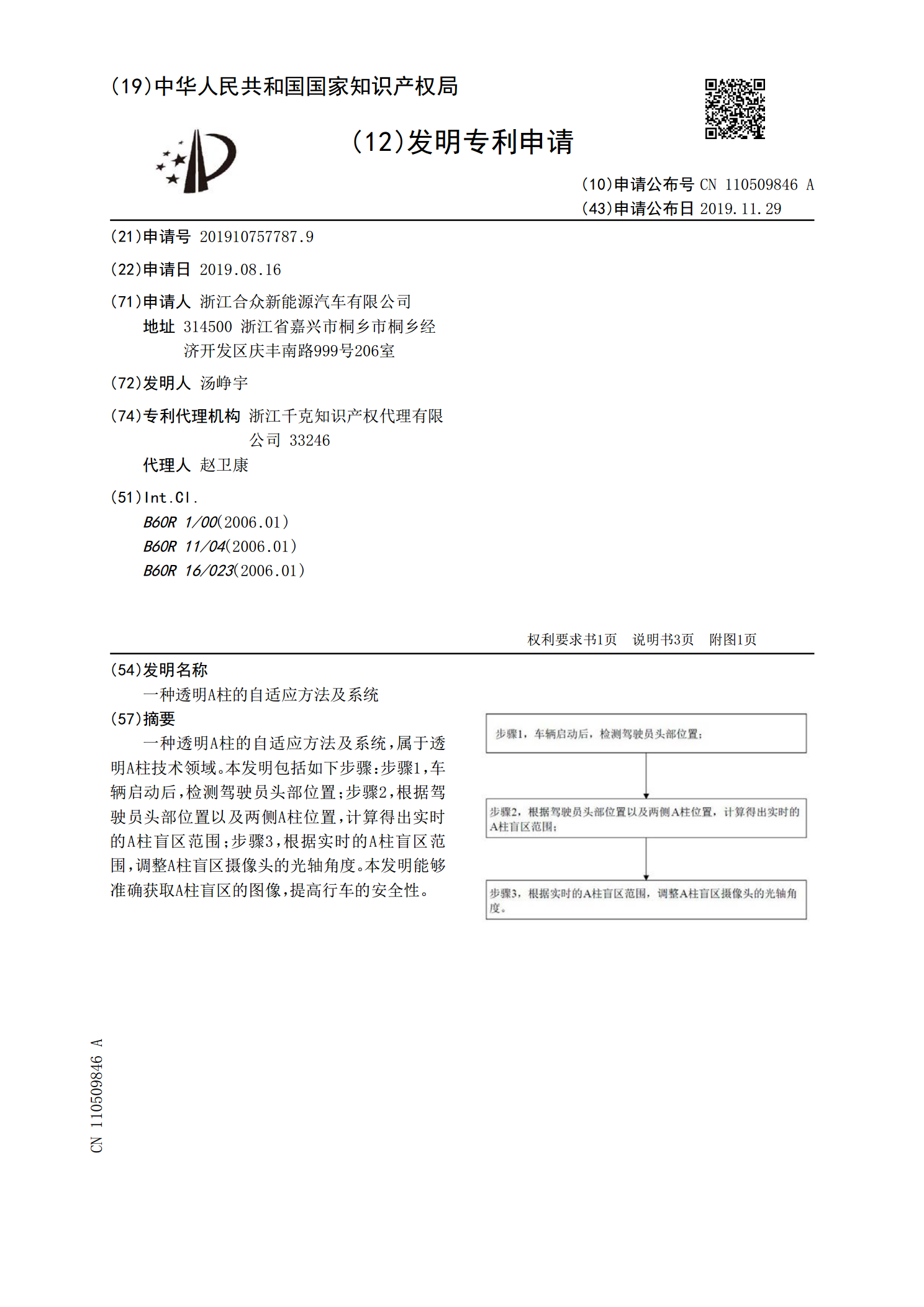
一种透明A柱的自适应方法及系统,属于透明A柱技术领域。本发明包括如下步骤:步骤1,车辆启动后,检测驾驶员头部位置;步骤2,根据驾驶员头部位置以及两侧A柱位置,计算得出实时的A柱盲区范围;步骤3,根据实时的A柱盲区范围,调整A柱盲区摄像头的光轴角度。本发明能够准确获取A柱盲区的图像,提高行车的安全性。

一种汽车A柱盲区图像显示系统及方法.pdf
本发明公开了一种汽车A柱盲区图像显示系统及方法,该系统的多个相机及柔性显示屏安装在汽车两端的A柱上,中央处理器封装在汽车内部,无需改变汽车原有的硬件结构,安装更加简便,且系统工作更加稳定可靠。该方法基于头部姿态和人眼位置确定A柱盲区图像坐标范围,并从拍摄的外部图像中截取A柱盲区图像后,通过透视变换调整截取的A柱盲区图像,调整画面角度,以更接近外部实际的环境,该方法可以根据驾驶员头部姿态和人眼位置变化动态显示最终的A柱盲区图像,更加准确可靠。