
一种透明A柱的自适应方法及系统.pdf

婀娜****aj


1/6
2/6
3/6

4/6
5/6
6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种透明A柱的自适应方法及系统.pdf
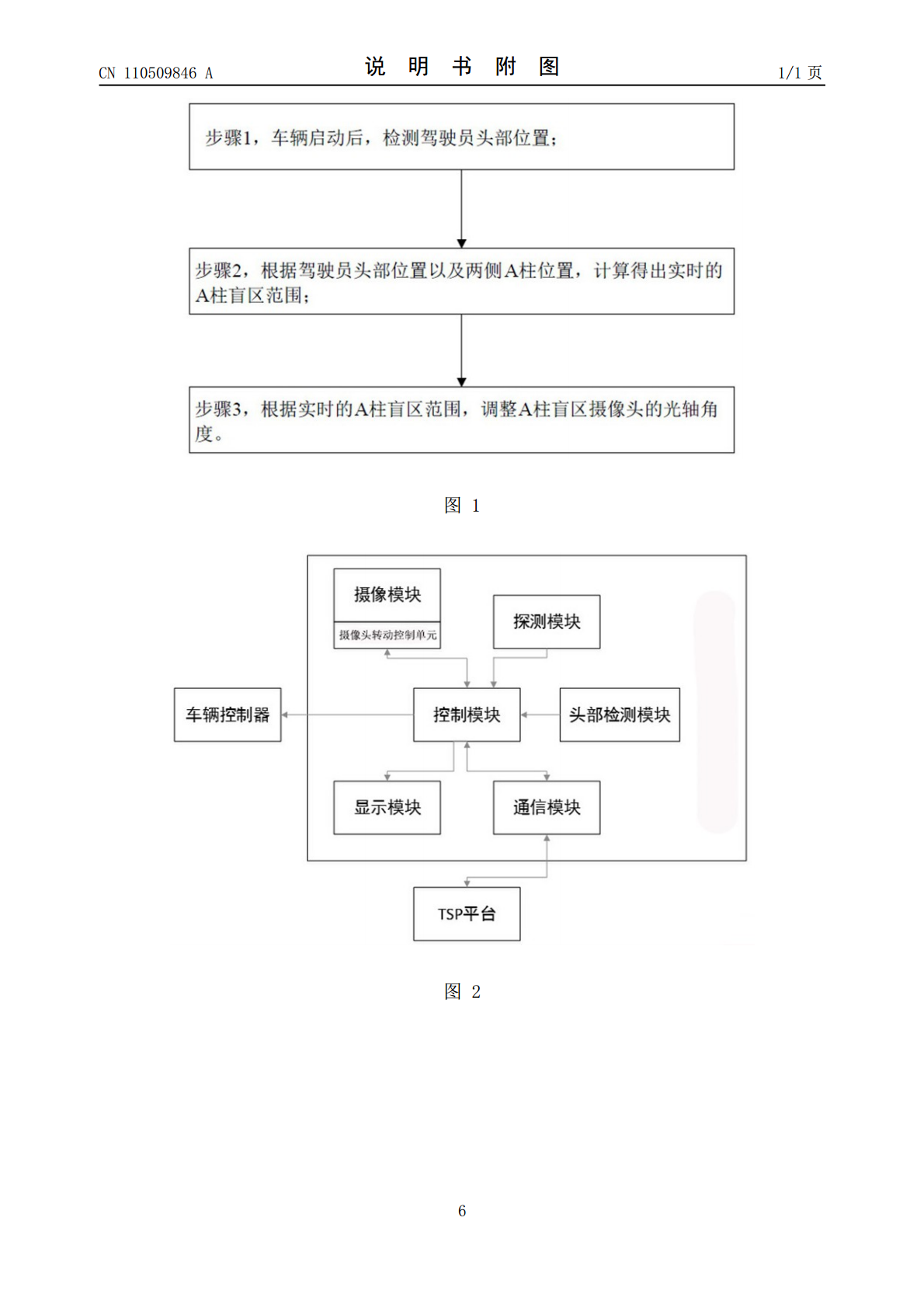
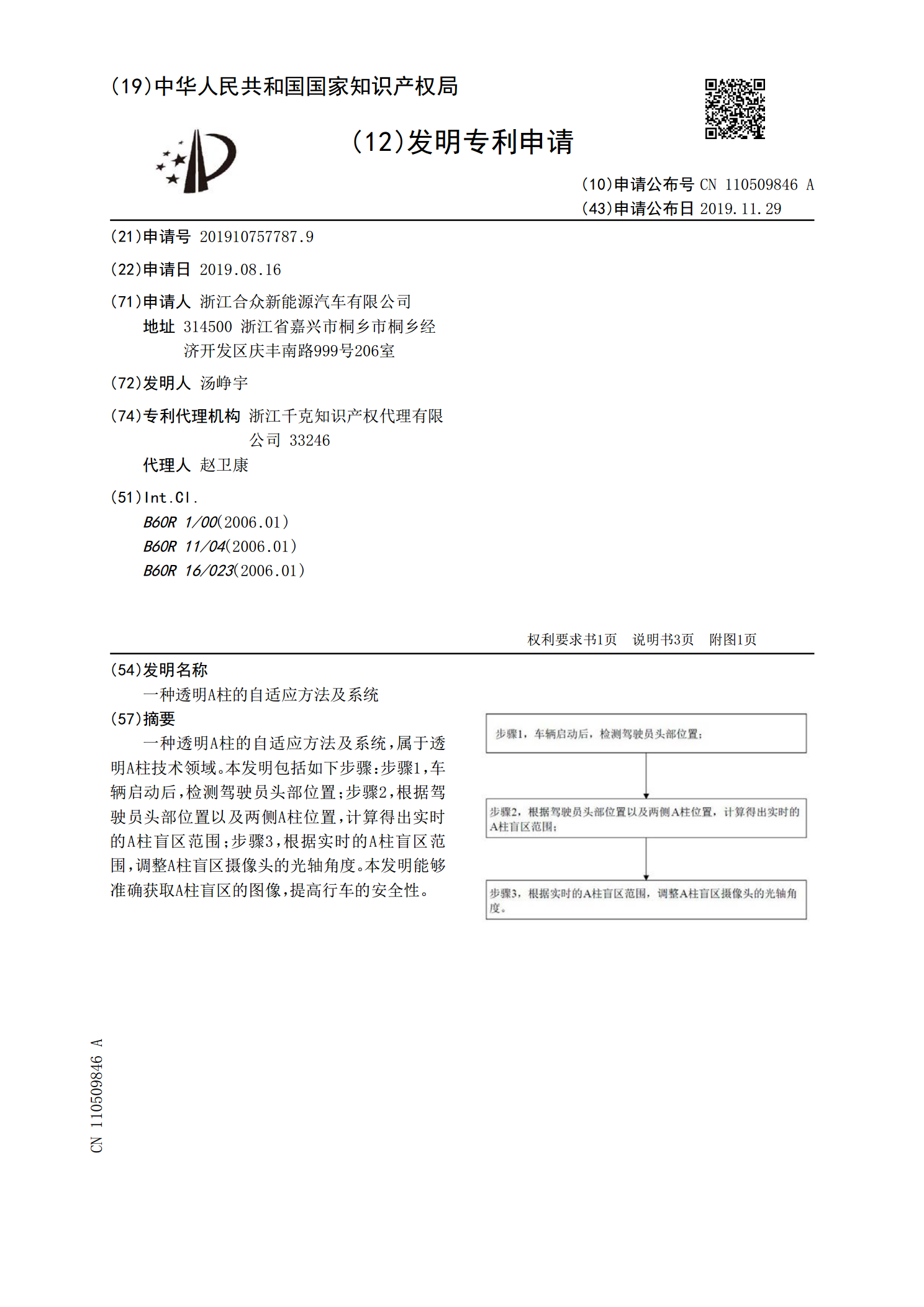
一种透明A柱的自适应方法及系统,属于透明A柱技术领域。本发明包括如下步骤:步骤1,车辆启动后,检测驾驶员头部位置;步骤2,根据驾驶员头部位置以及两侧A柱位置,计算得出实时的A柱盲区范围;步骤3,根据实时的A柱盲区范围,调整A柱盲区摄像头的光轴角度。本发明能够准确获取A柱盲区的图像,提高行车的安全性。
一种透明A柱的智能显示系统及方法.pdf
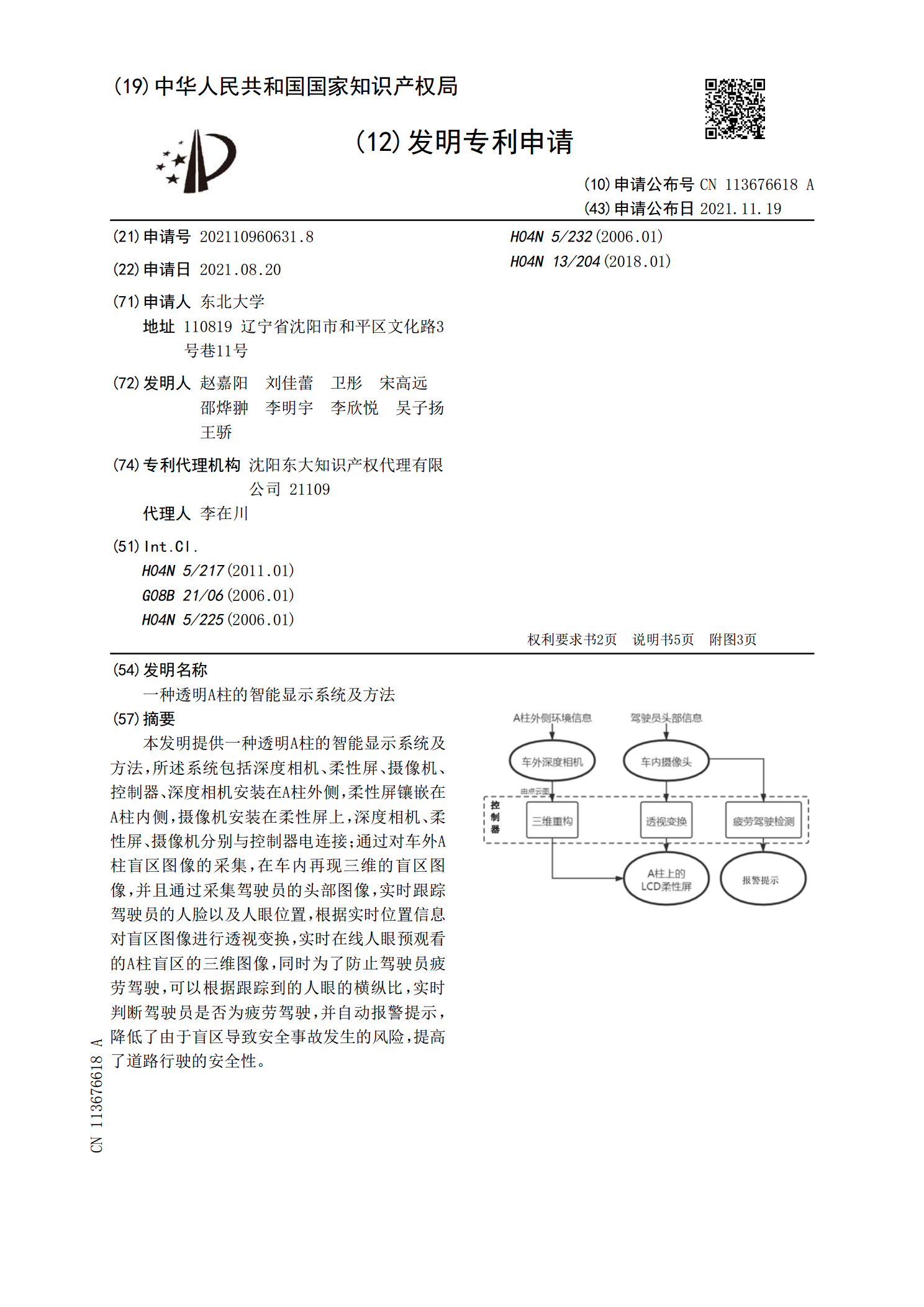
本发明提供一种透明A柱的智能显示系统及方法,所述系统包括深度相机、柔性屏、摄像机、控制器、深度相机安装在A柱外侧,柔性屏镶嵌在A柱内侧,摄像机安装在柔性屏上,深度相机、柔性屏、摄像机分别与控制器电连接;通过对车外A柱盲区图像的采集,在车内再现三维的盲区图像,并且通过采集驾驶员的头部图像,实时跟踪驾驶员的人脸以及人眼位置,根据实时位置信息对盲区图像进行透视变换,实时在线人眼预观看的A柱盲区的三维图像,同时为了防止驾驶员疲劳驾驶,可以根据跟踪到的人眼的横纵比,实时判断驾驶员是否为疲劳驾驶,并自动报警提示,降低
一种实现汽车A柱视野透明的方法及其系统装置.pdf
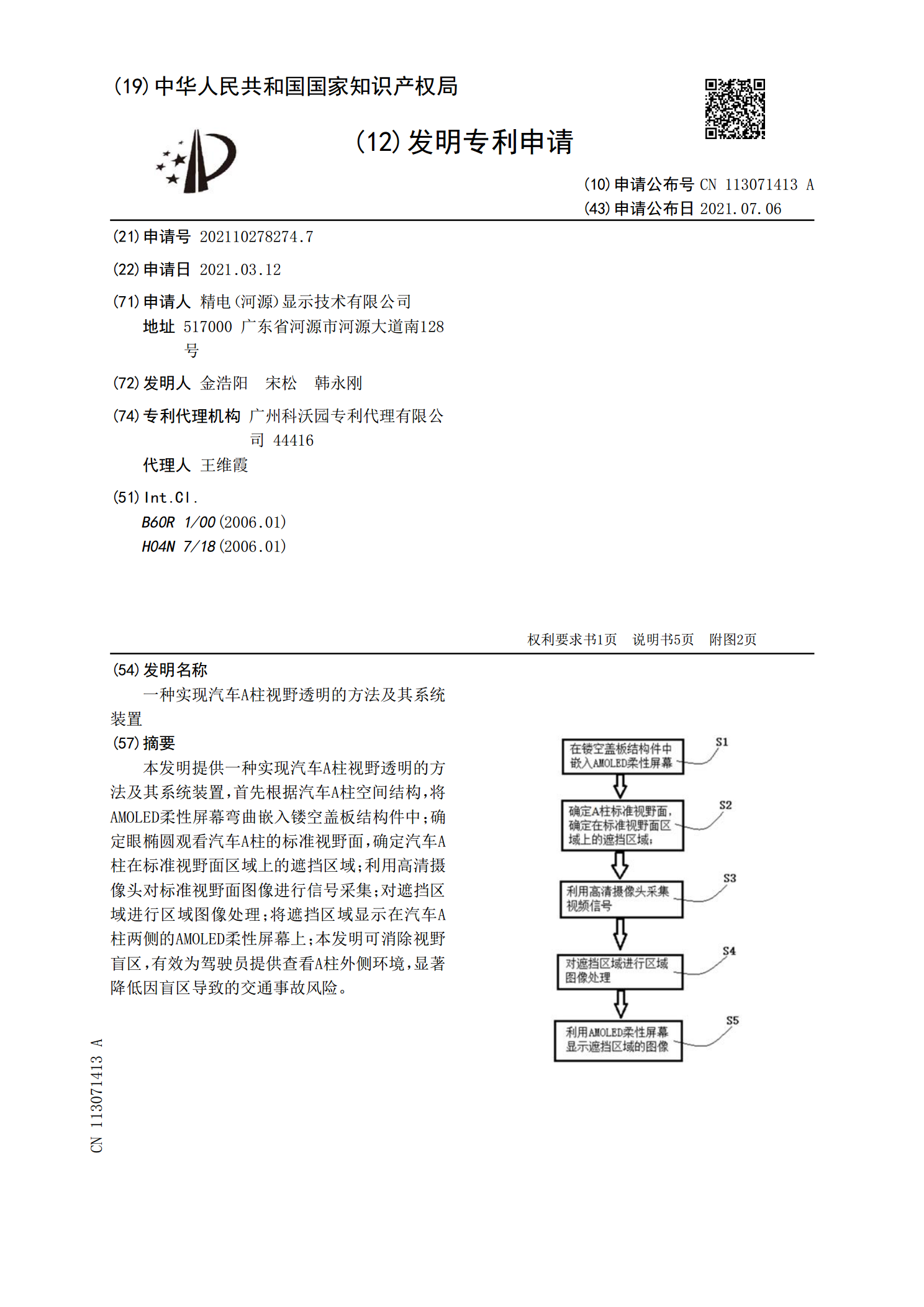
本发明提供一种实现汽车A柱视野透明的方法及其系统装置,首先根据汽车A柱空间结构,将AMOLED柔性屏幕弯曲嵌入镂空盖板结构件中;确定眼椭圆观看汽车A柱的标准视野面,确定汽车A柱在标准视野面区域上的遮挡区域;利用高清摄像头对标准视野面图像进行信号采集;对遮挡区域进行区域图像处理;将遮挡区域显示在汽车A柱两侧的AMOLED柔性屏幕上;本发明可消除视野盲区,有效为驾驶员提供查看A柱外侧环境,显著降低因盲区导致的交通事故风险。
一种汽车透明A柱显示系统.pdf
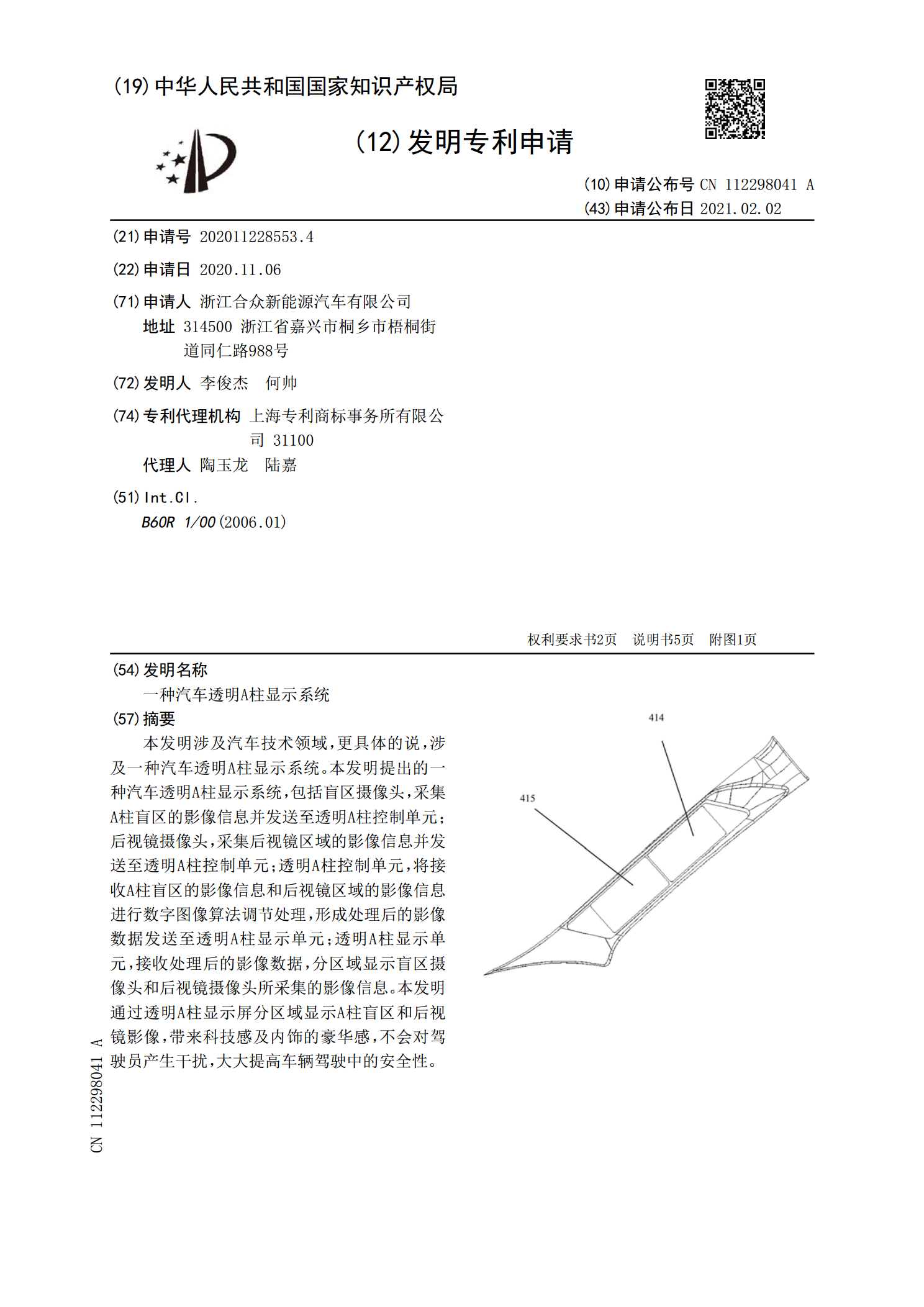
本发明涉及汽车技术领域,更具体的说,涉及一种汽车透明A柱显示系统。本发明提出的一种汽车透明A柱显示系统,包括盲区摄像头,采集A柱盲区的影像信息并发送至透明A柱控制单元;后视镜摄像头,采集后视镜区域的影像信息并发送至透明A柱控制单元;透明A柱控制单元,将接收A柱盲区的影像信息和后视镜区域的影像信息进行数字图像算法调节处理,形成处理后的影像数据发送至透明A柱显示单元;透明A柱显示单元,接收处理后的影像数据,分区域显示盲区摄像头和后视镜摄像头所采集的影像信息。本发明通过透明A柱显示屏分区域显示A柱盲区和后视镜影
一种透明A柱的多摄像头实现方法及系统.pdf
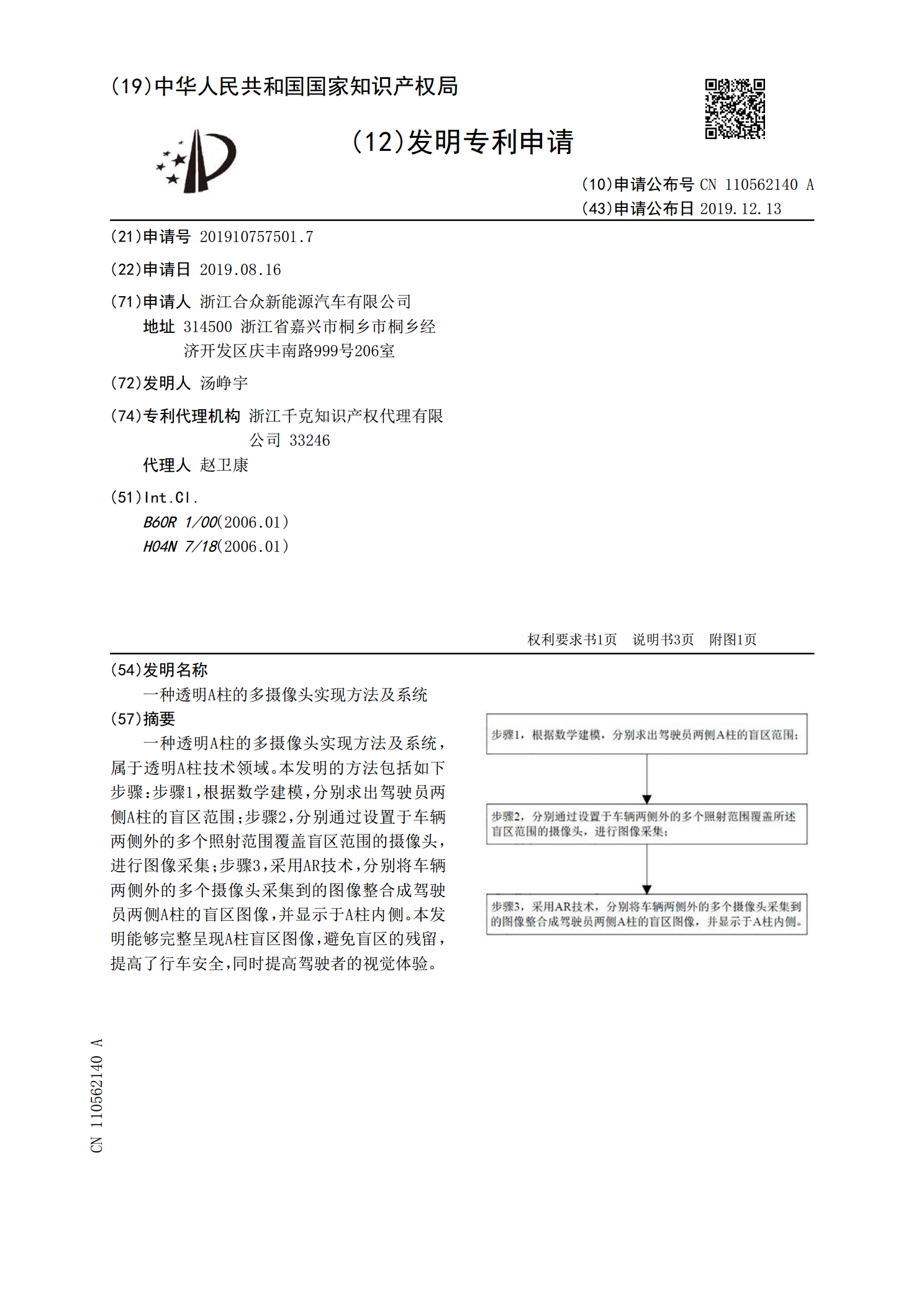
一种透明A柱的多摄像头实现方法及系统,属于透明A柱技术领域。本发明的方法包括如下步骤:步骤1,根据数学建模,分别求出驾驶员两侧A柱的盲区范围;步骤2,分别通过设置于车辆两侧外的多个照射范围覆盖盲区范围的摄像头,进行图像采集;步骤3,采用AR技术,分别将车辆两侧外的多个摄像头采集到的图像整合成驾驶员两侧A柱的盲区图像,并显示于A柱内侧。本发明能够完整呈现A柱盲区图像,避免盲区的残留,提高了行车安全,同时提高驾驶者的视觉体验。