
一种汽车A柱盲区图像显示系统及方法.pdf

努力****妙风

1/10
2/10
3/10

4/10
5/10

6/10
7/10
8/10
9/10

10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种汽车A柱盲区图像显示系统及方法.pdf
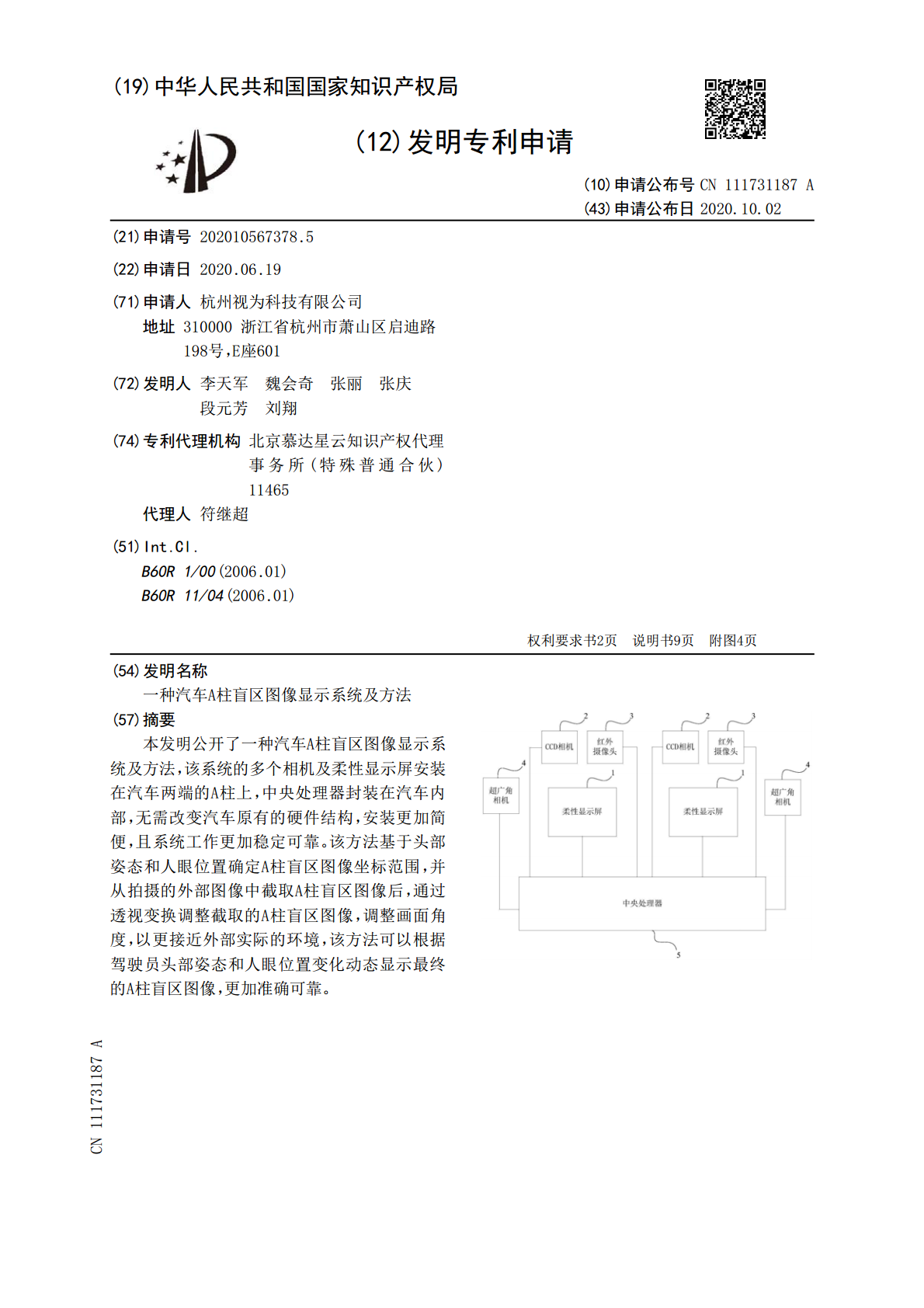
本发明公开了一种汽车A柱盲区图像显示系统及方法,该系统的多个相机及柔性显示屏安装在汽车两端的A柱上,中央处理器封装在汽车内部,无需改变汽车原有的硬件结构,安装更加简便,且系统工作更加稳定可靠。该方法基于头部姿态和人眼位置确定A柱盲区图像坐标范围,并从拍摄的外部图像中截取A柱盲区图像后,通过透视变换调整截取的A柱盲区图像,调整画面角度,以更接近外部实际的环境,该方法可以根据驾驶员头部姿态和人眼位置变化动态显示最终的A柱盲区图像,更加准确可靠。
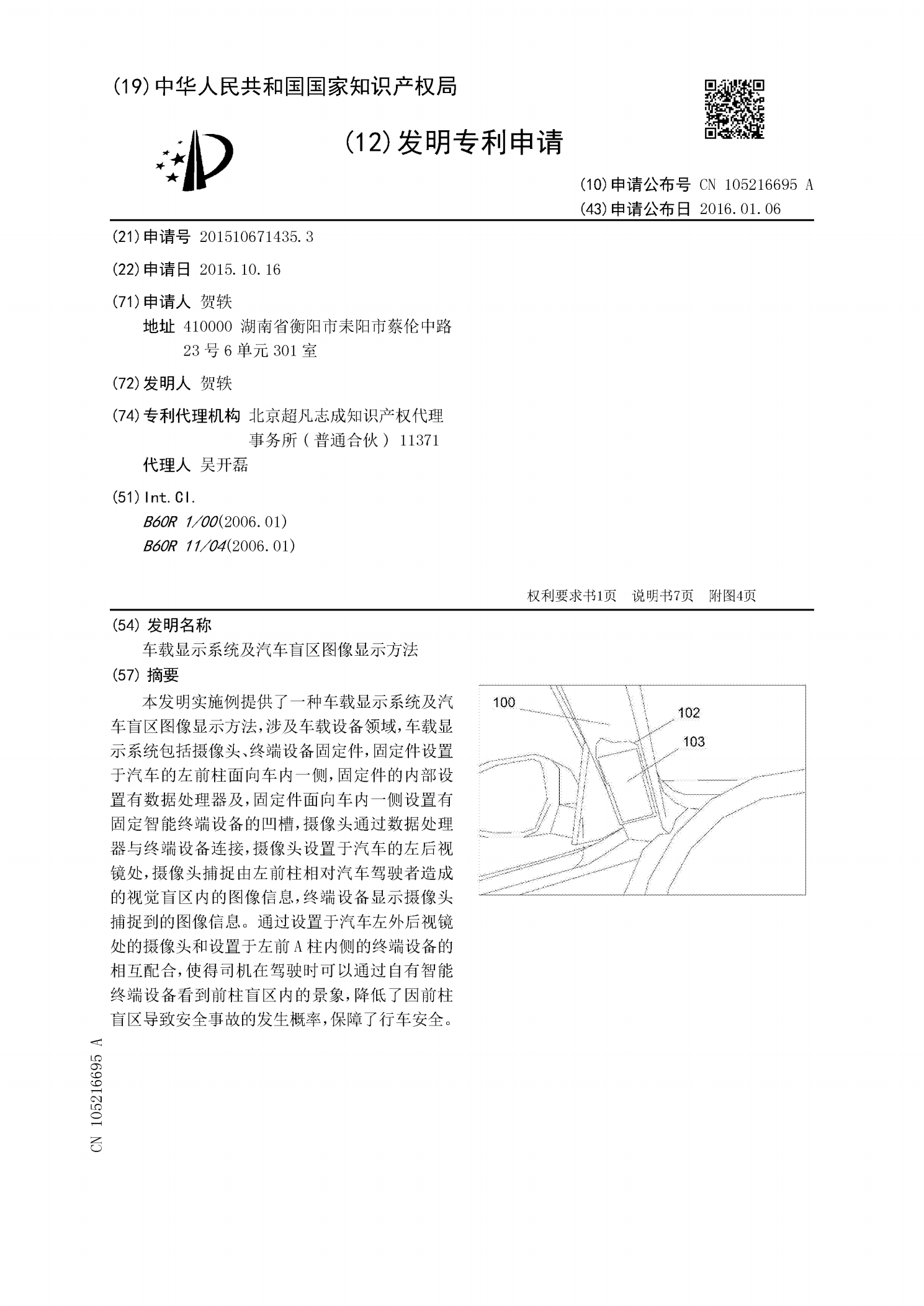
车载显示系统及汽车盲区图像显示方法.pdf
本发明实施例提供了一种车载显示系统及汽车盲区图像显示方法,涉及车载设备领域,车载显示系统包括摄像头、终端设备固定件,固定件设置于汽车的左前柱面向车内一侧,固定件的内部设置有数据处理器及,固定件面向车内一侧设置有固定智能终端设备的凹槽,摄像头通过数据处理器与终端设备连接,摄像头设置于汽车的左后视镜处,摄像头捕捉由左前柱相对汽车驾驶者造成的视觉盲区内的图像信息,终端设备显示摄像头捕捉到的图像信息。通过设置于汽车左外后视镜处的摄像头和设置于左前A柱内侧的终端设备的相互配合,使得司机在驾驶时可以通过自有智能终端设
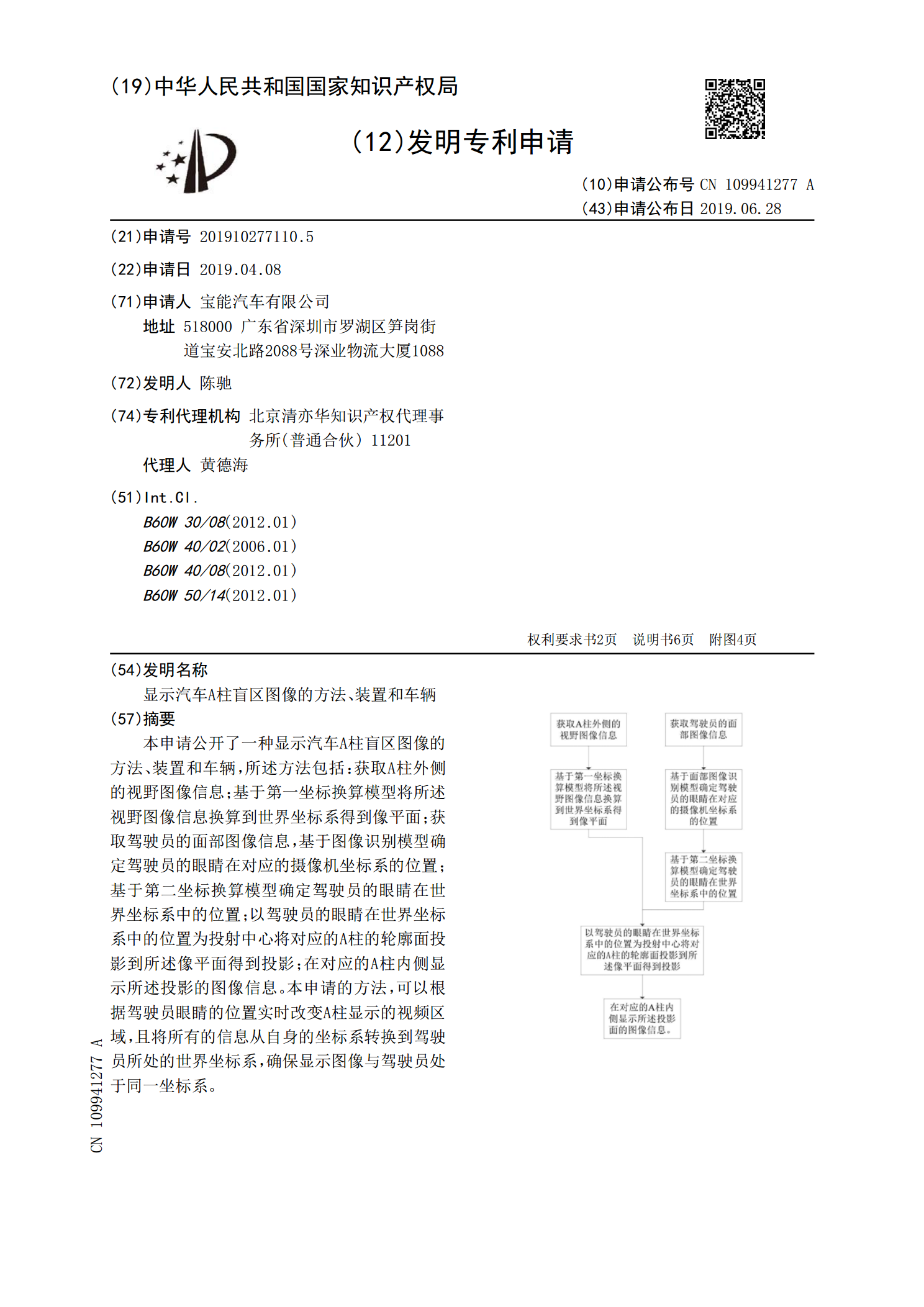
显示汽车A柱盲区图像的方法、装置和车辆.pdf
本申请公开了一种显示汽车A柱盲区图像的方法、装置和车辆,所述方法包括:获取A柱外侧的视野图像信息;基于第一坐标换算模型将所述视野图像信息换算到世界坐标系得到像平面;获取驾驶员的面部图像信息,基于图像识别模型确定驾驶员的眼睛在对应的摄像机坐标系的位置;基于第二坐标换算模型确定驾驶员的眼睛在世界坐标系中的位置;以驾驶员的眼睛在世界坐标系中的位置为投射中心将对应的A柱的轮廓面投影到所述像平面得到投影;在对应的A柱内侧显示所述投影的图像信息。本申请的方法,可以根据驾驶员眼睛的位置实时改变A柱显示的视频区域,且将所

一种汽车A柱盲区的显示系统.pdf
本发明涉及汽车A柱盲区显示技术领域,尤其涉及一种汽车A柱盲区的显示系统,包括控制开关、左侧成像系统和右侧成像系统,控制开关的输出端分别与左侧成像系统和右侧成像系统的输入端电连接,左侧成像系统和右侧成像系统均包括摄像头、摄像控制模块、夜间模式切换模块、焦距调节模块、图像采集模块、图像分析模块、图像传输模块、处理器、图像接收模块、图像裁剪模块、图像拼接模块、图像显示模块和显示屏。本发明采用了摄像头来对A柱盲区进行摄像,并将摄像的画面传输到处理器上进行算法处理,传输到拼接的显示屏上进行显示,相对于现有的显示系统
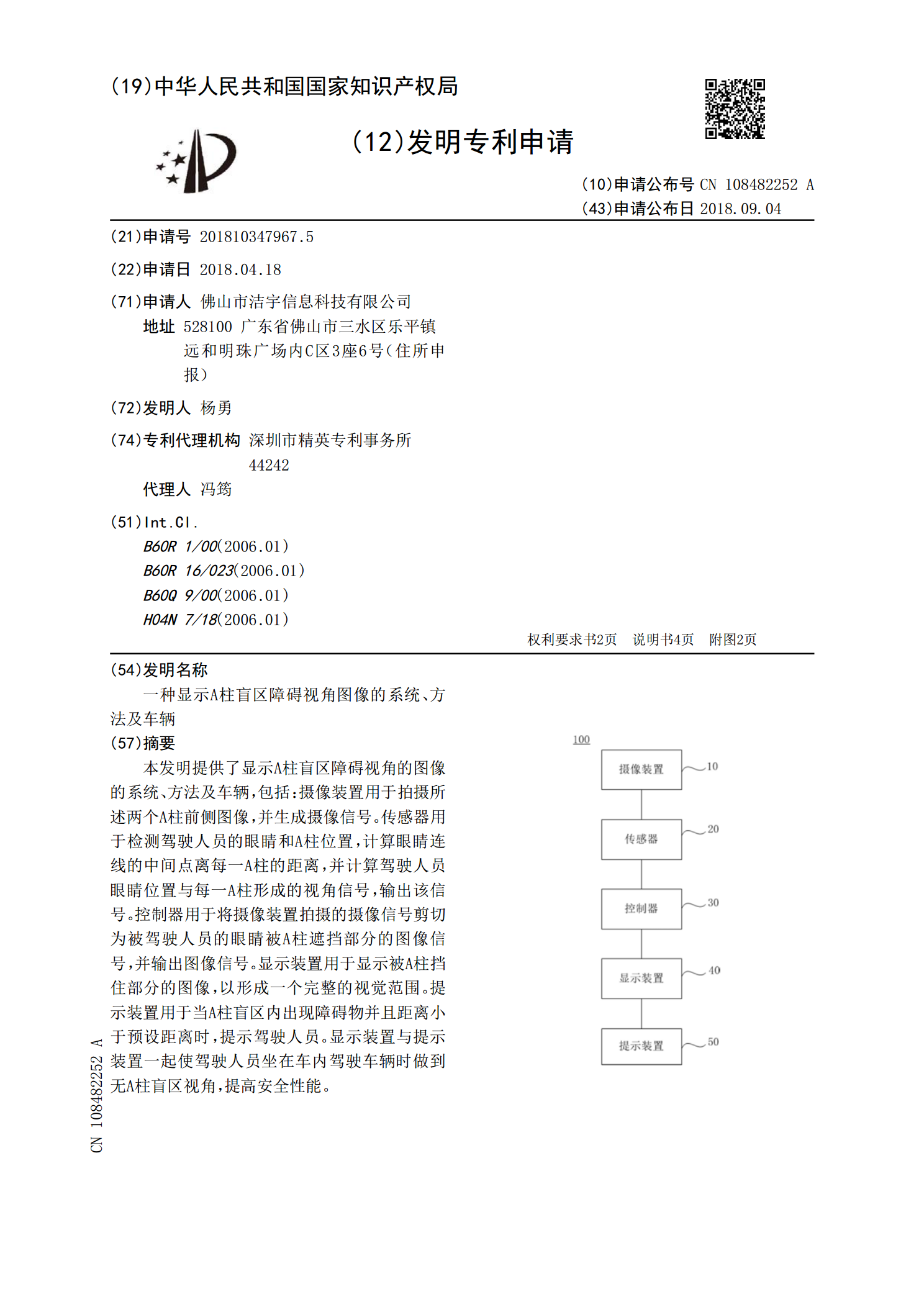
一种显示A柱盲区障碍视角图像的系统、方法及车辆.pdf
本发明提供了显示A柱盲区障碍视角的图像的系统、方法及车辆,包括:摄像装置用于拍摄所述两个A柱前侧图像,并生成摄像信号。传感器用于检测驾驶人员的眼睛和A柱位置,计算眼睛连线的中间点离每一A柱的距离,并计算驾驶人员眼睛位置与每一A柱形成的视角信号,输出该信号。控制器用于将摄像装置拍摄的摄像信号剪切为被驾驶人员的眼睛被A柱遮挡部分的图像信号,并输出图像信号。显示装置用于显示被A柱挡住部分的图像,以形成一个完整的视觉范围。提示装置用于当A柱盲区内出现障碍物并且距离小于预设距离时,提示驾驶人员。显示装置与提示装置一