
机器人避障方法、装置、设备及存储介质.pdf

一条****贺6


1/10

2/10

3/10
4/10
5/10

6/10

7/10
8/10

9/10

10/10
亲,该文档总共20页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
机器人避障方法、装置、设备及存储介质.pdf
本申请实施例公开了一种机器人避障方法、装置、设备及存储介质。其中,该方法包括:获取目标路段和所述机器人对应于所述目标路段的避障等级;控制所述机器人在所述目标路段行驶过程中根据所述避障等级进行避障。本申请实施例提高了机器人通行过程中针对通行环境进行避障的自适应能力,进而提高了机器人的工作效率。
机器人避障方法、装置、电子设备及存储介质.pdf
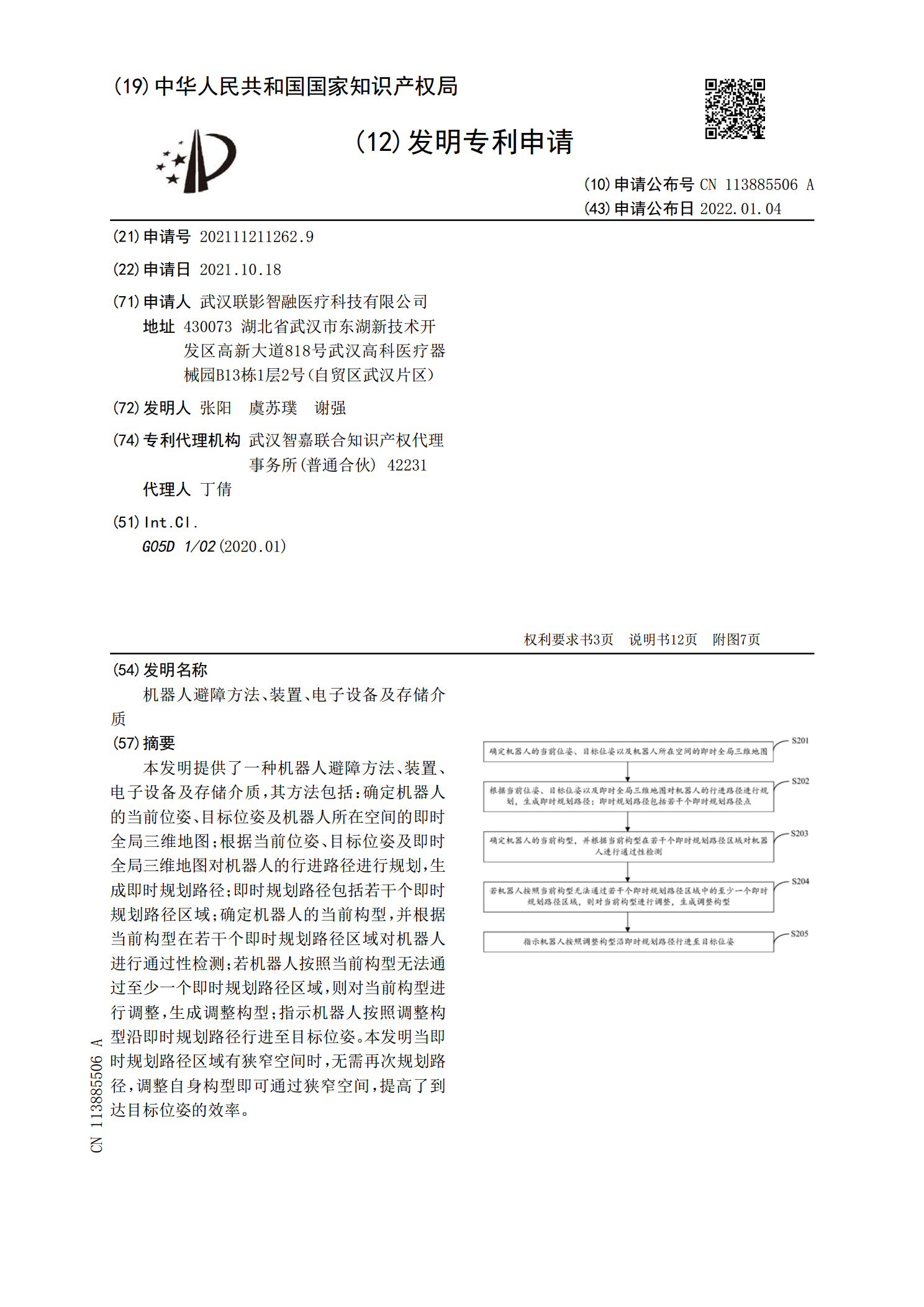
本发明提供了一种机器人避障方法、装置、电子设备及存储介质,其方法包括:确定机器人的当前位姿、目标位姿及机器人所在空间的即时全局三维地图;根据当前位姿、目标位姿及即时全局三维地图对机器人的行进路径进行规划,生成即时规划路径;即时规划路径包括若干个即时规划路径区域;确定机器人的当前构型,并根据当前构型在若干个即时规划路径区域对机器人进行通过性检测;若机器人按照当前构型无法通过至少一个即时规划路径区域,则对当前构型进行调整,生成调整构型;指示机器人按照调整构型沿即时规划路径行进至目标位姿。本发明当即时规划路径区
水面机器人避障方法、装置、设备及可读存储介质.pdf
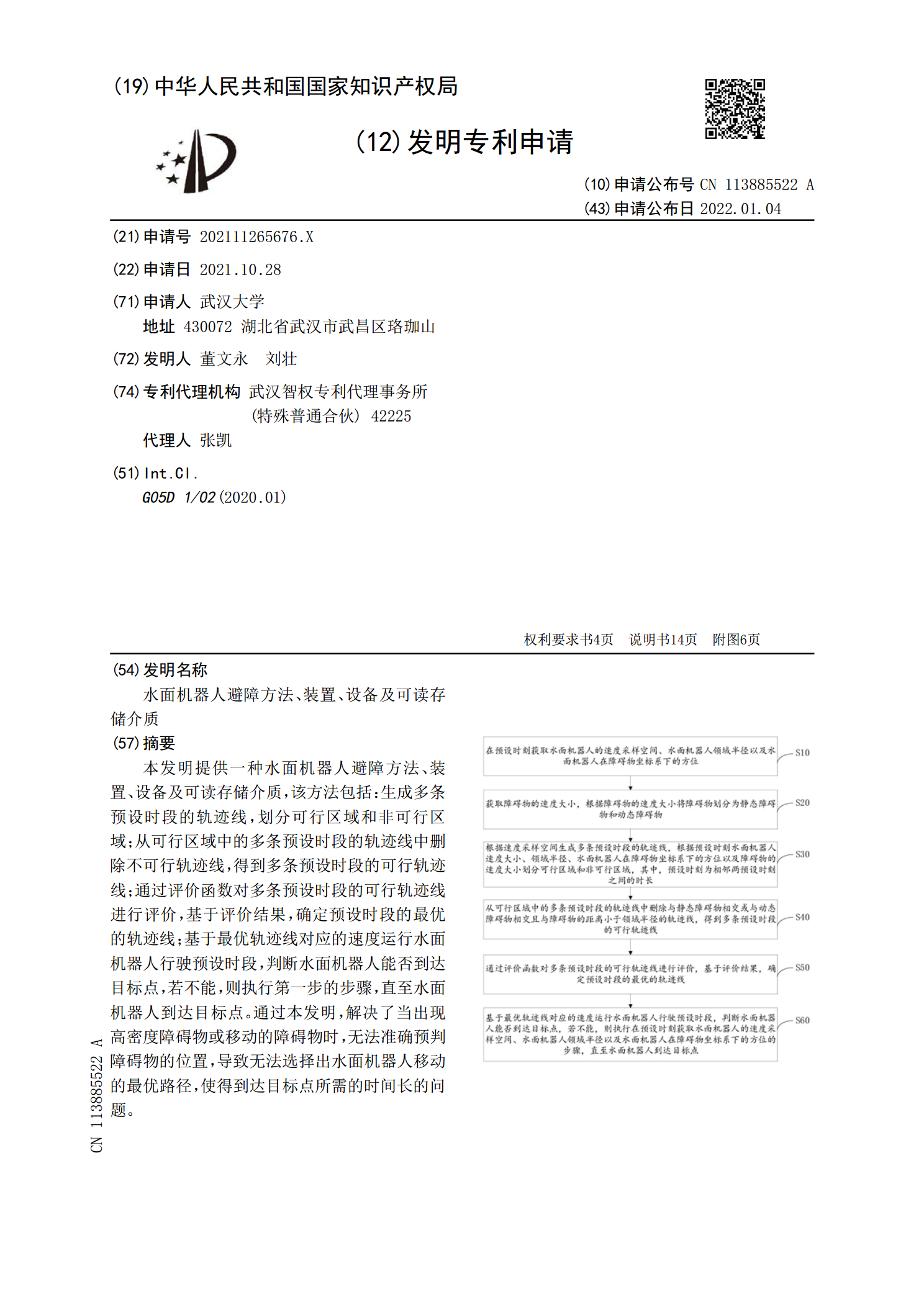
本发明提供一种水面机器人避障方法、装置、设备及可读存储介质,该方法包括:生成多条预设时段的轨迹线,划分可行区域和非可行区域;从可行区域中的多条预设时段的轨迹线中删除不可行轨迹线,得到多条预设时段的可行轨迹线;通过评价函数对多条预设时段的可行轨迹线进行评价,基于评价结果,确定预设时段的最优的轨迹线;基于最优轨迹线对应的速度运行水面机器人行驶预设时段,判断水面机器人能否到达目标点,若不能,则执行第一步的步骤,直至水面机器人到达目标点。通过本发明,解决了当出现高密度障碍物或移动的障碍物时,无法准确预判障碍物的位
机器人避障方法及装置、机器人、存储介质、电子设备.pdf
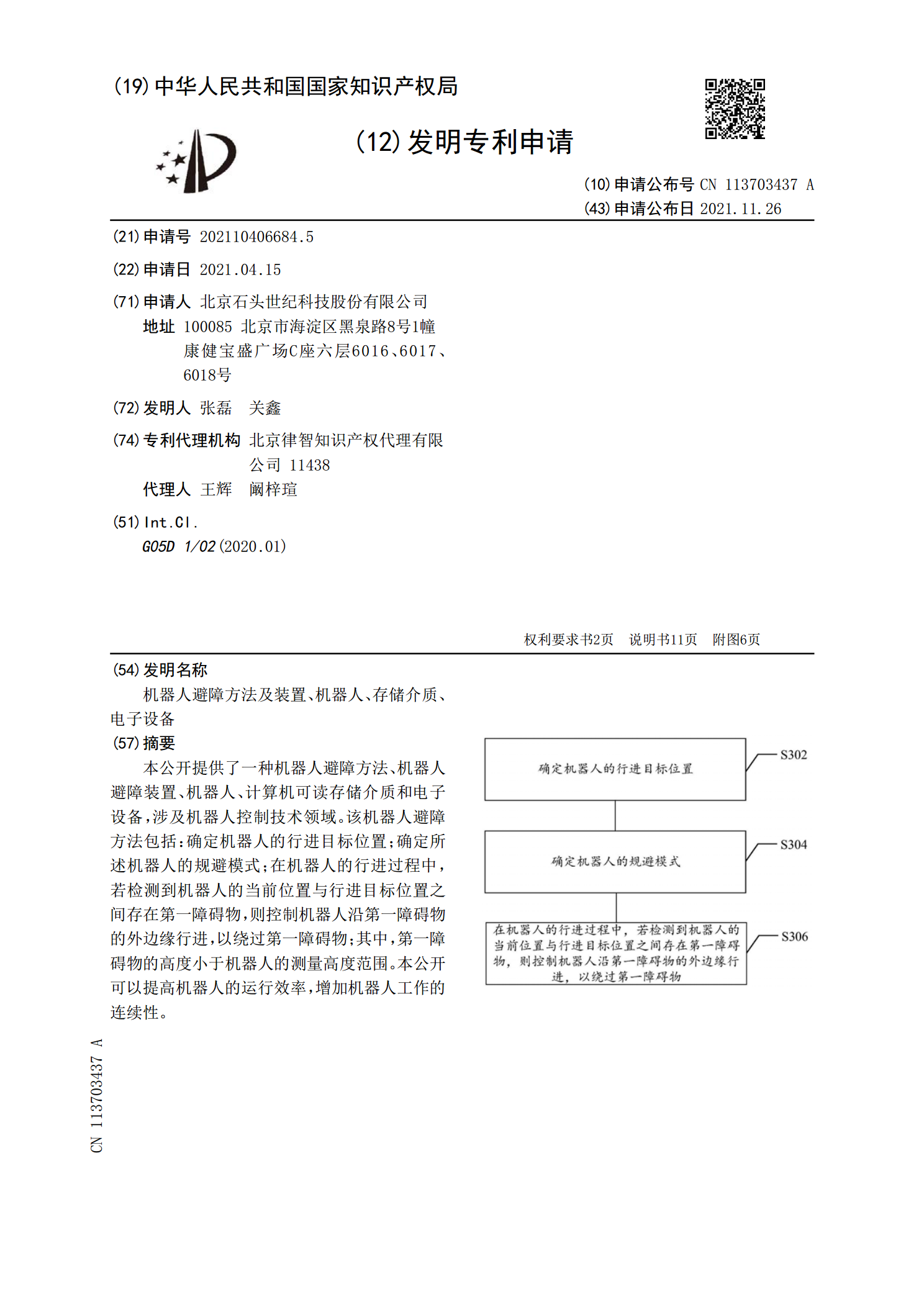
本公开提供了一种机器人避障方法、机器人避障装置、机器人、计算机可读存储介质和电子设备,涉及机器人控制技术领域。该机器人避障方法包括:确定机器人的行进目标位置;确定所述机器人的规避模式;在机器人的行进过程中,若检测到机器人的当前位置与行进目标位置之间存在第一障碍物,则控制机器人沿第一障碍物的外边缘行进,以绕过第一障碍物;其中,第一障碍物的高度小于机器人的测量高度范围。本公开可以提高机器人的运行效率,增加机器人工作的连续性。
机器人的避障方法、装置、机器人及存储介质.pdf
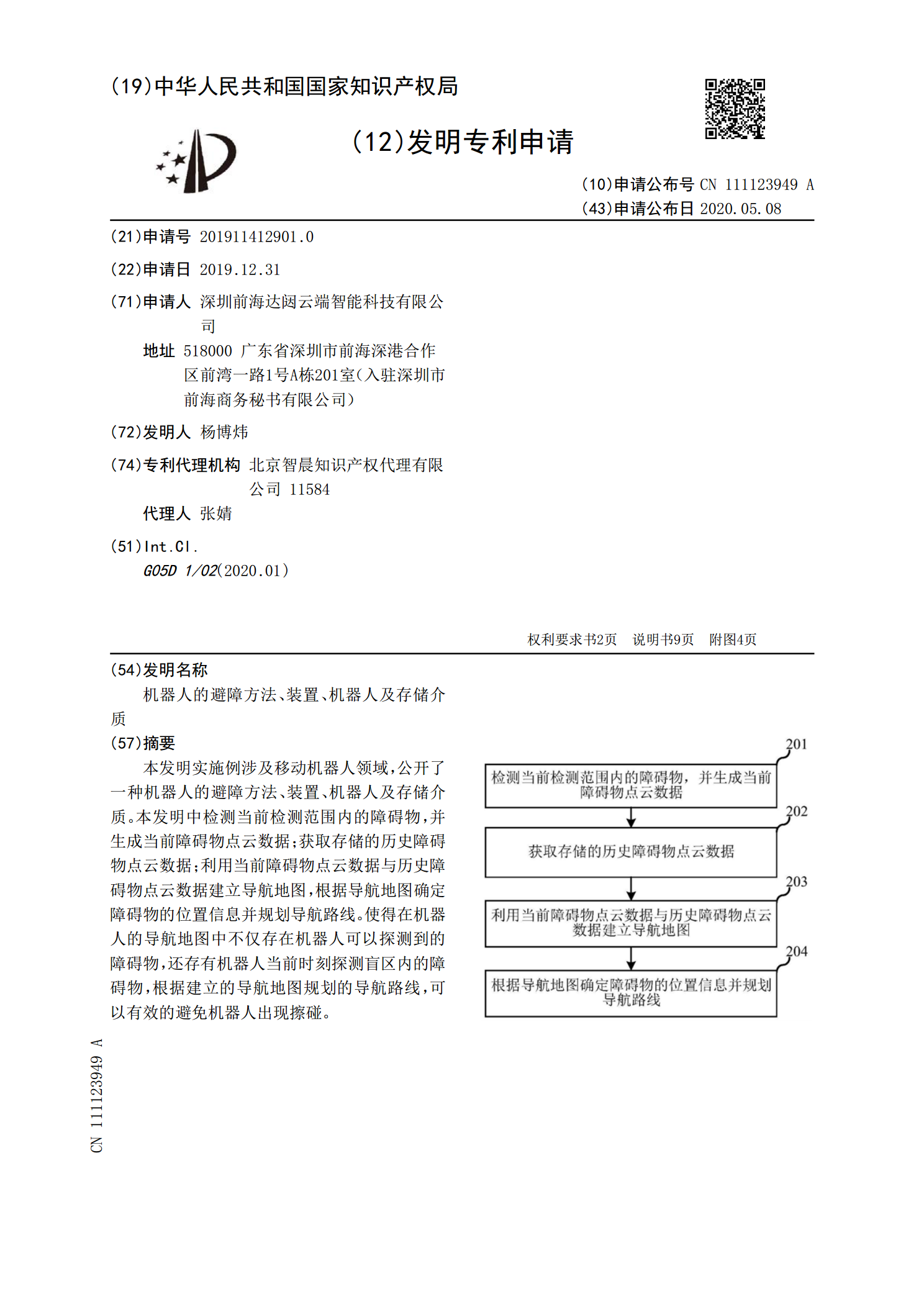
本发明实施例涉及移动机器人领域,公开了一种机器人的避障方法、装置、机器人及存储介质。本发明中检测当前检测范围内的障碍物,并生成当前障碍物点云数据;获取存储的历史障碍物点云数据;利用当前障碍物点云数据与历史障碍物点云数据建立导航地图,根据导航地图确定障碍物的位置信息并规划导航路线。使得在机器人的导航地图中不仅存在机器人可以探测到的障碍物,还存有机器人当前时刻探测盲区内的障碍物,根据建立的导航地图规划的导航路线,可以有效的避免机器人出现擦碰。