
一种导盲机器人的控制方法及导盲机器人.pdf

飞舟****文章


1/10

2/10

3/10

4/10

5/10

6/10

7/10
8/10

9/10

10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种导盲机器人的控制方法及导盲机器人.pdf
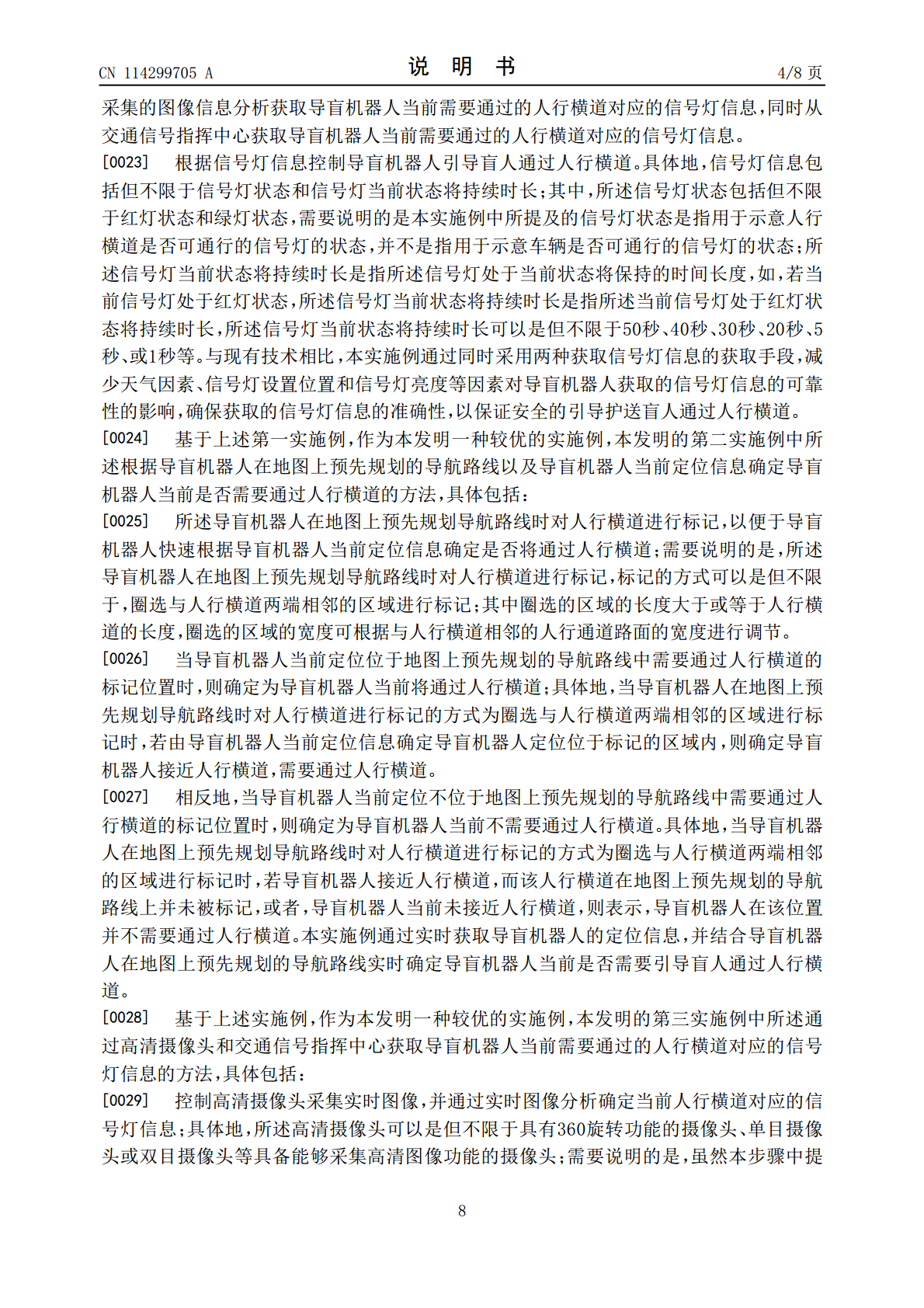
本发明公开一种导盲机器人的控制方法及导盲机器人,所述方法具体包括:实时获取导盲机器人当前定位信息;根据导盲机器人在地图上预先规划的导航路线以及导盲机器人当前定位信息确定导盲机器人当前是否需要通过人行横道;若导盲机器人当前需要通过人行横道,则通过高清摄像头和交通信号指挥中心获取导盲机器人当前需要通过的人行横道对应的信号灯信息;根据信号灯信息控制导盲机器人引导盲人通过人行横道。本发明在摄像头识别信号灯信息的基础上同时采用根据导盲机器人实时定位从交通信号中心获取信号灯状态的技术,两种技术手段相互弥补,以保证信号
一种导盲机器人及导盲系统、导盲方法.pdf
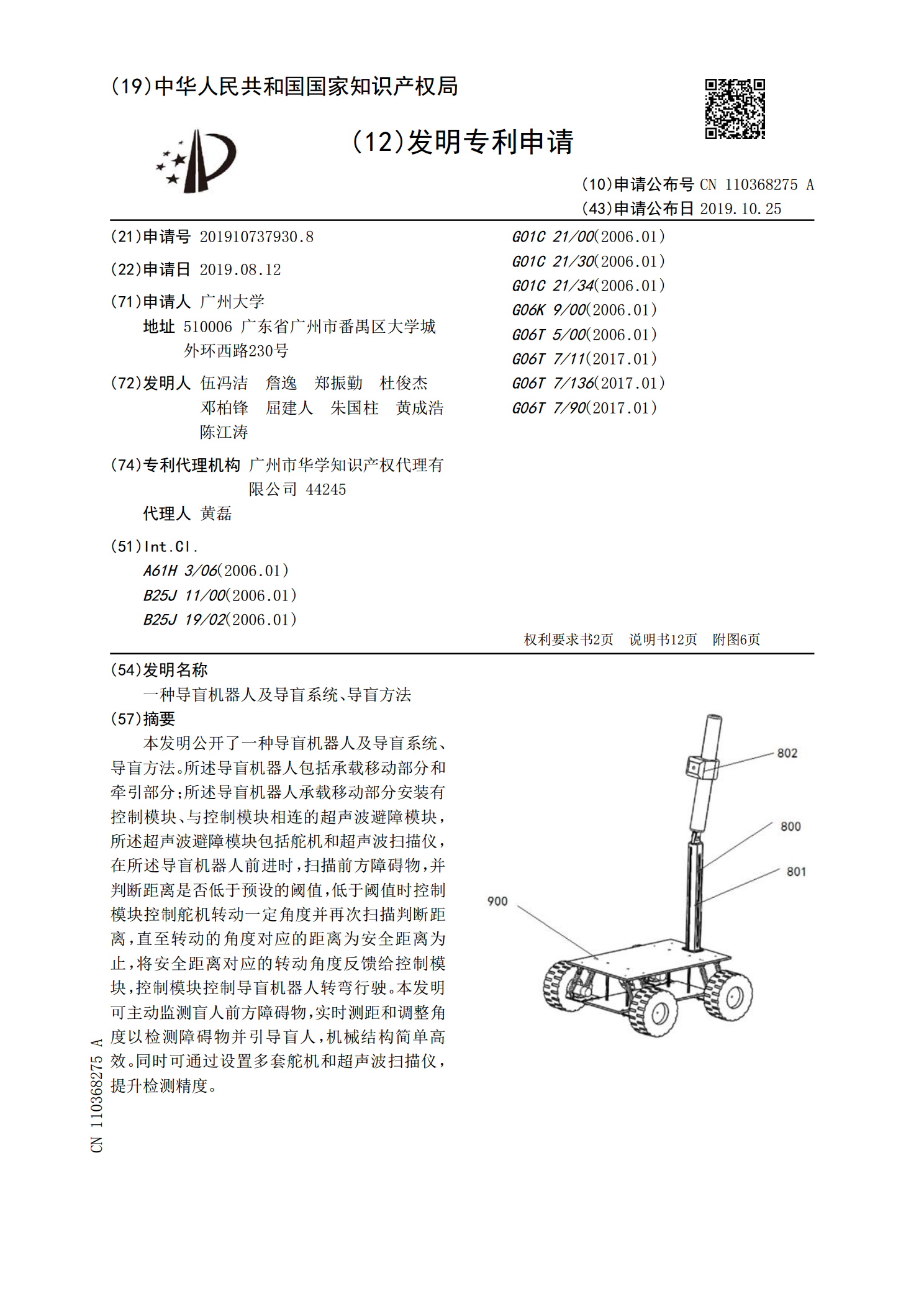
本发明公开了一种导盲机器人及导盲系统、导盲方法。所述导盲机器人包括承载移动部分和牵引部分;所述导盲机器人承载移动部分安装有控制模块、与控制模块相连的超声波避障模块,所述超声波避障模块包括舵机和超声波扫描仪,在所述导盲机器人前进时,扫描前方障碍物,并判断距离是否低于预设的阈值,低于阈值时控制模块控制舵机转动一定角度并再次扫描判断距离,直至转动的角度对应的距离为安全距离为止,将安全距离对应的转动角度反馈给控制模块,控制模块控制导盲机器人转弯行驶。本发明可主动监测盲人前方障碍物,实时测距和调整角度以检测障碍物并

一种移动型导盲机器人系统及导盲方法.pdf
本发明涉及一种移动型导盲机器人系统及导盲方法,属于残疾人辅助设备领域。本发明能够实时的进行非结构化环境下的多源融合感知及智能评估,进而将评估结果提供给复杂环境约束下的决策规划模块进行运算,不仅能实现实时环境感知,同时可进行实时决策,实现全自主的路径引导。能够基于多源融合进行路面评估,从材质和平坦性两个维度对路面进行融合评估,获得更为全面的信息。当前的代表性方案普遍使用语义分割技术判别可行路面,通过RGB‑D数据,融合平坦度检测和材质检测,能为盲人更好更全面的探测和评估路面可通行性。

一种智能化导盲机器人及其导盲方法.pdf
一种智能化导盲机器人,包括车体、驱动轮、雷达模块、相机模块及导盲连接杆;车体内部有智能化导盲机器人控制单元;其导盲方法中采用视觉ORB‑SLAM的方式来对未知环境进行建图,利用三维点云信息来描述未知场景的地图信息;点云信息更加丰富,更有益于导盲机器人在未知环境中精确地定位。可以更加精确地对室外的交通信号灯,行人等目标进行识别定位,可以进一步地提升盲人的出行安全问题;结构简单,方便实用,实用性强。

导盲机器人.pdf
本发明提供了一种导盲机器人,本发明提供的导盲机器人中,设置有行走驱动装置以及速度传感器;行走驱动装置能够根据速度传感器检测到的盲人的行走速度控制导盲机器人的行走速度,使导盲机器人的行走速度与盲人的行走速度匹配。从而本发明提供的导盲机器人能够很好的适应盲人的行走速度。