
一种移动型导盲机器人系统及导盲方法.pdf

一吃****瀚文


1/10

2/10
3/10
4/10

5/10
6/10

7/10

8/10

9/10

10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种移动型导盲机器人系统及导盲方法.pdf
本发明涉及一种移动型导盲机器人系统及导盲方法,属于残疾人辅助设备领域。本发明能够实时的进行非结构化环境下的多源融合感知及智能评估,进而将评估结果提供给复杂环境约束下的决策规划模块进行运算,不仅能实现实时环境感知,同时可进行实时决策,实现全自主的路径引导。能够基于多源融合进行路面评估,从材质和平坦性两个维度对路面进行融合评估,获得更为全面的信息。当前的代表性方案普遍使用语义分割技术判别可行路面,通过RGB‑D数据,融合平坦度检测和材质检测,能为盲人更好更全面的探测和评估路面可通行性。
一种导盲机器人及导盲系统、导盲方法.pdf
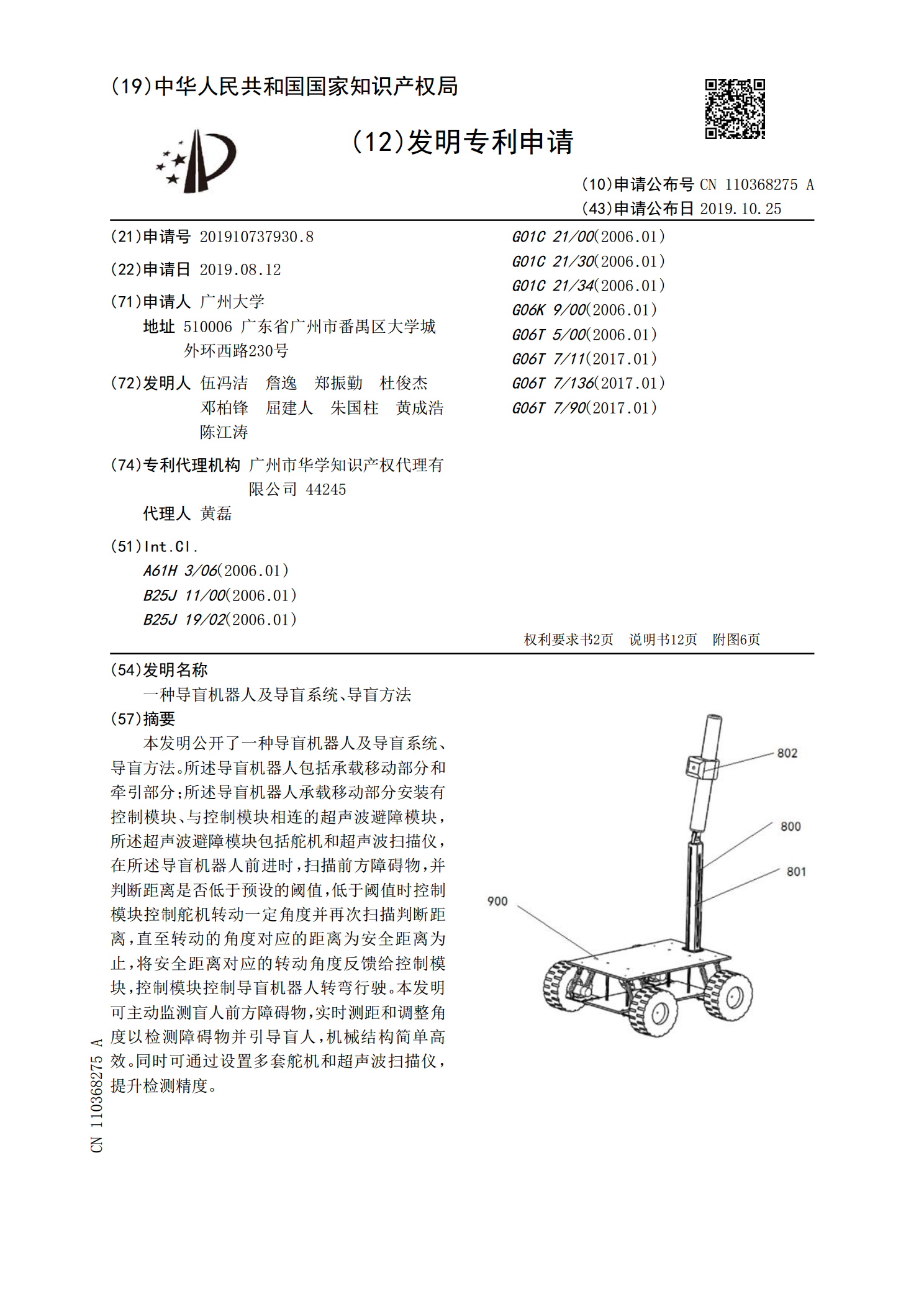
本发明公开了一种导盲机器人及导盲系统、导盲方法。所述导盲机器人包括承载移动部分和牵引部分;所述导盲机器人承载移动部分安装有控制模块、与控制模块相连的超声波避障模块,所述超声波避障模块包括舵机和超声波扫描仪,在所述导盲机器人前进时,扫描前方障碍物,并判断距离是否低于预设的阈值,低于阈值时控制模块控制舵机转动一定角度并再次扫描判断距离,直至转动的角度对应的距离为安全距离为止,将安全距离对应的转动角度反馈给控制模块,控制模块控制导盲机器人转弯行驶。本发明可主动监测盲人前方障碍物,实时测距和调整角度以检测障碍物并
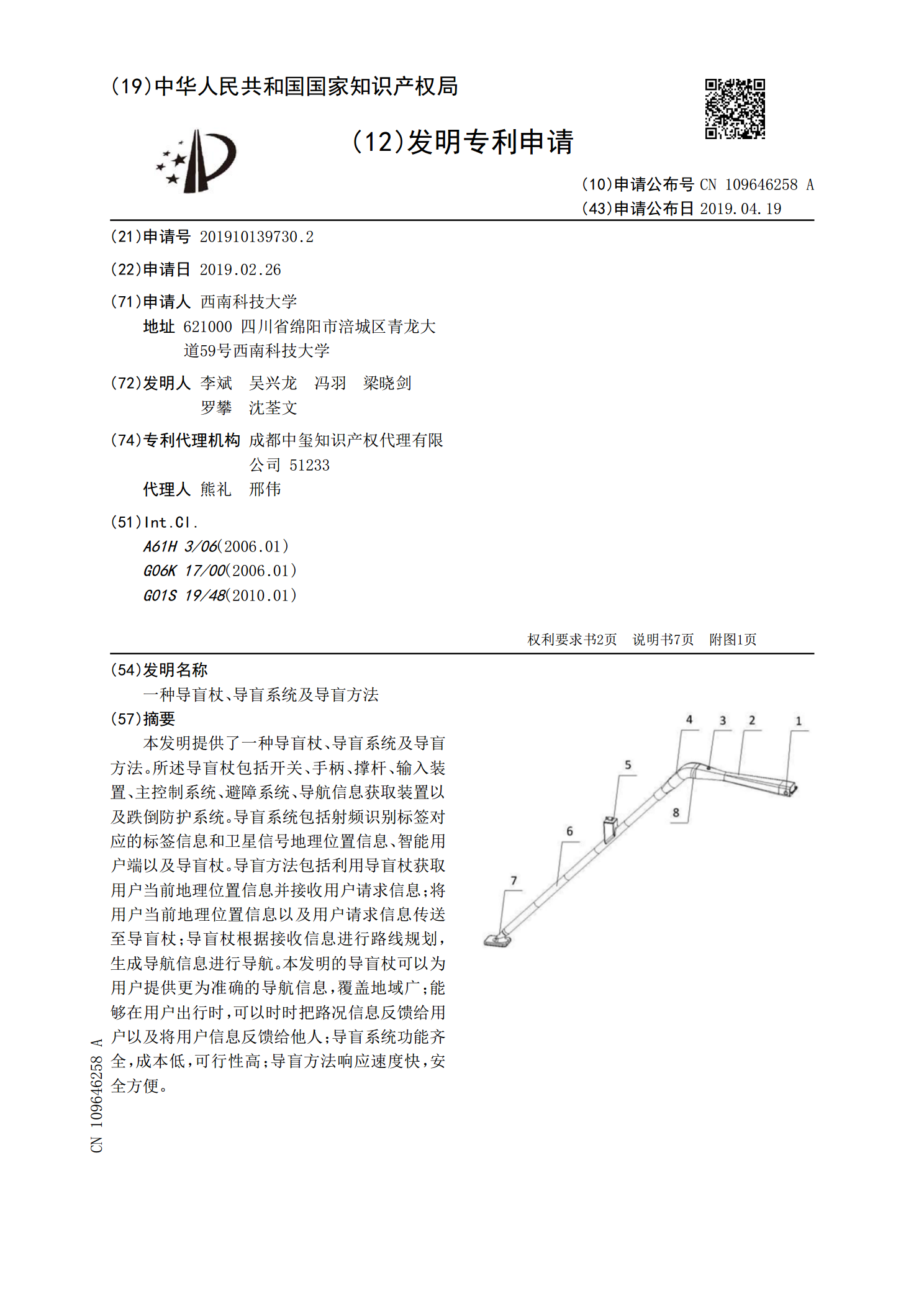
一种导盲杖、导盲系统及导盲方法.pdf
本发明提供了一种导盲杖、导盲系统及导盲方法。所述导盲杖包括开关、手柄、撑杆、输入装置、主控制系统、避障系统、导航信息获取装置以及跌倒防护系统。导盲系统包括射频识别标签对应的标签信息和卫星信号地理位置信息、智能用户端以及导盲杖。导盲方法包括利用导盲杖获取用户当前地理位置信息并接收用户请求信息;将用户当前地理位置信息以及用户请求信息传送至导盲杖;导盲杖根据接收信息进行路线规划,生成导航信息进行导航。本发明的导盲杖可以为用户提供更为准确的导航信息,覆盖地域广;能够在用户出行时,可以时时把路况信息反馈给用户以及将

一种导盲地板、导盲系统及导盲方法.pdf
本发明公开了一种可更换的带电子组件的导盲地板、导盲系统及一种导盲方法。导盲地板包括底板,多个从所述底板向上伸延的凸起物,包括至少一条管道的管道部分,所述管道位于所述底板的顶部表面并具有向上的开口,管道部分沿底板的整个长度伸延,还包括被容纳在所述管道内的电子组件。导盲系统包括至少一块导盲地板和远程装置,远程装置包括无线读取器,输入装置和输出装置。无线读取器与各导盲地板的无线装置和后端服务器通讯,并提醒用户从后端服务器获取信息。

导盲方法及导盲系统.pdf
本发明公开了一种导盲方法及导盲系统,该导盲方法包括:获取使用者所处场景的图像;基于所述图像获取使用者所处场景中各对象的位置信息;基于所述图像获取使用者所处场景中各对象的尺寸信息;根据所述位置信息以及所述尺寸信息获取障碍物信息,并通过语音向使用者播放障碍物信息以对使用者进行导盲。本发明使使用者直接方便的获得导盲指示信息,并且该方法可在现有智能手机设备上直接实现,无需携带额外的导盲器具,也进一步方便了使用者的出行。