
一种基于超车的盲区检测系统.pdf

慧娇****文章

1/10

2/10

3/10

4/10
5/10

6/10

7/10

8/10

9/10
10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于超车的盲区检测系统.pdf
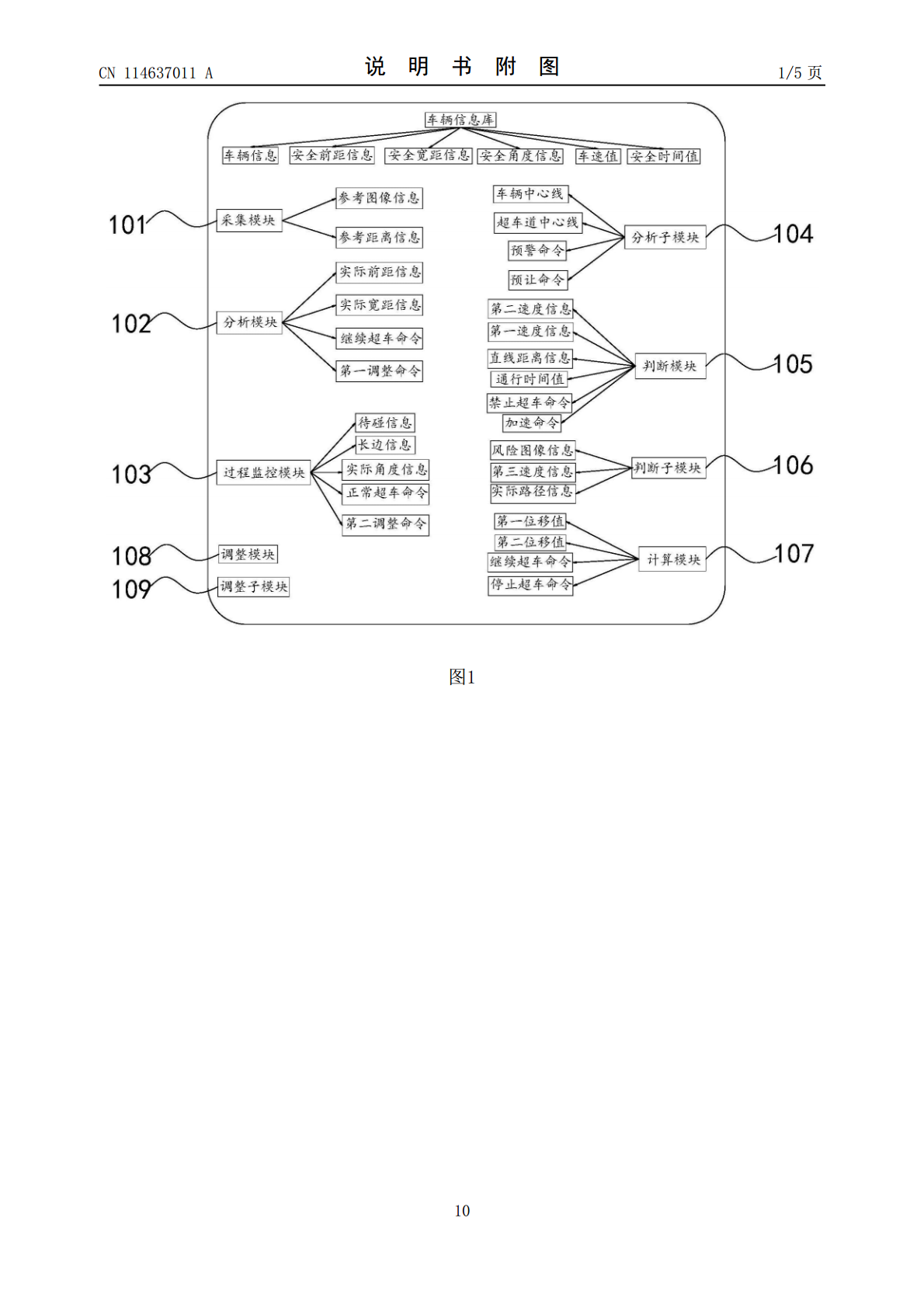
本发明创新提供了一种基于超车的盲区检测系统,包括多个前视摄像头和多个毫米波雷达,所述盲区检测系统还包括车辆信息库,所述车辆信息库内包括若干比对信息,若干所述比对信息包括车辆信息、安全前距信息、安全宽距信息以及安全角度信息,还包括用于采集参考图像信息和参考距离信息的采集模块,用于将实际前距信息和实际宽距信息分别与安全前距信息和安全宽距信息进行比较的分析模块,用于向本车发出正常超车命令或第二调整命令的过程监控模块。
一种基于车辆盲区检测系统的汽车盲区检测方法.pdf
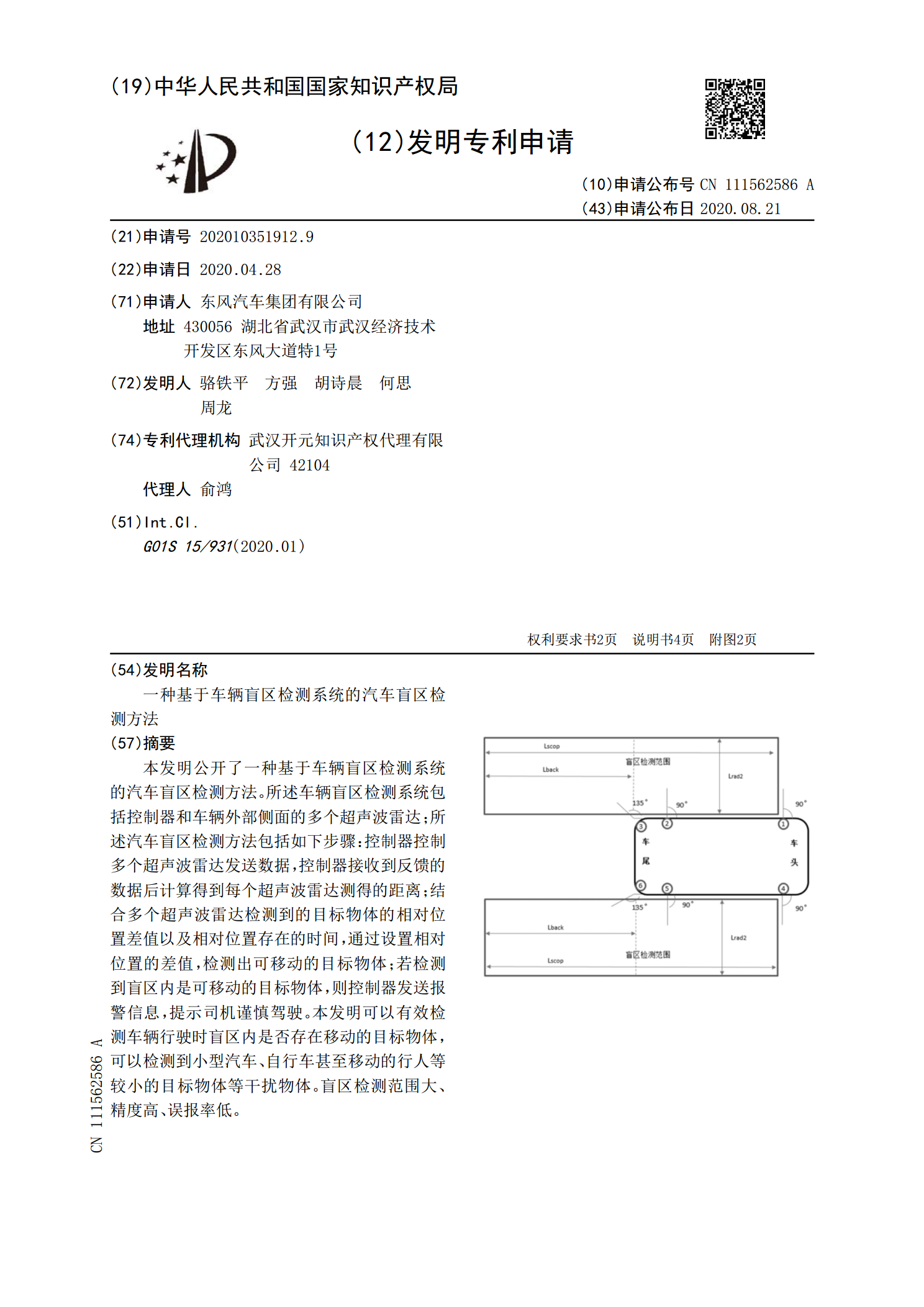
本发明公开了一种基于车辆盲区检测系统的汽车盲区检测方法。所述车辆盲区检测系统包括控制器和车辆外部侧面的多个超声波雷达;所述汽车盲区检测方法包括如下步骤:控制器控制多个超声波雷达发送数据,控制器接收到反馈的数据后计算得到每个超声波雷达测得的距离;结合多个超声波雷达检测到的目标物体的相对位置差值以及相对位置存在的时间,通过设置相对位置的差值,检测出可移动的目标物体;若检测到盲区内是可移动的目标物体,则控制器发送报警信息,提示司机谨慎驾驶。本发明可以有效检测车辆行驶时盲区内是否存在移动的目标物体,可以检测到小型
一种基于视觉的盲区检测系统方法.pdf
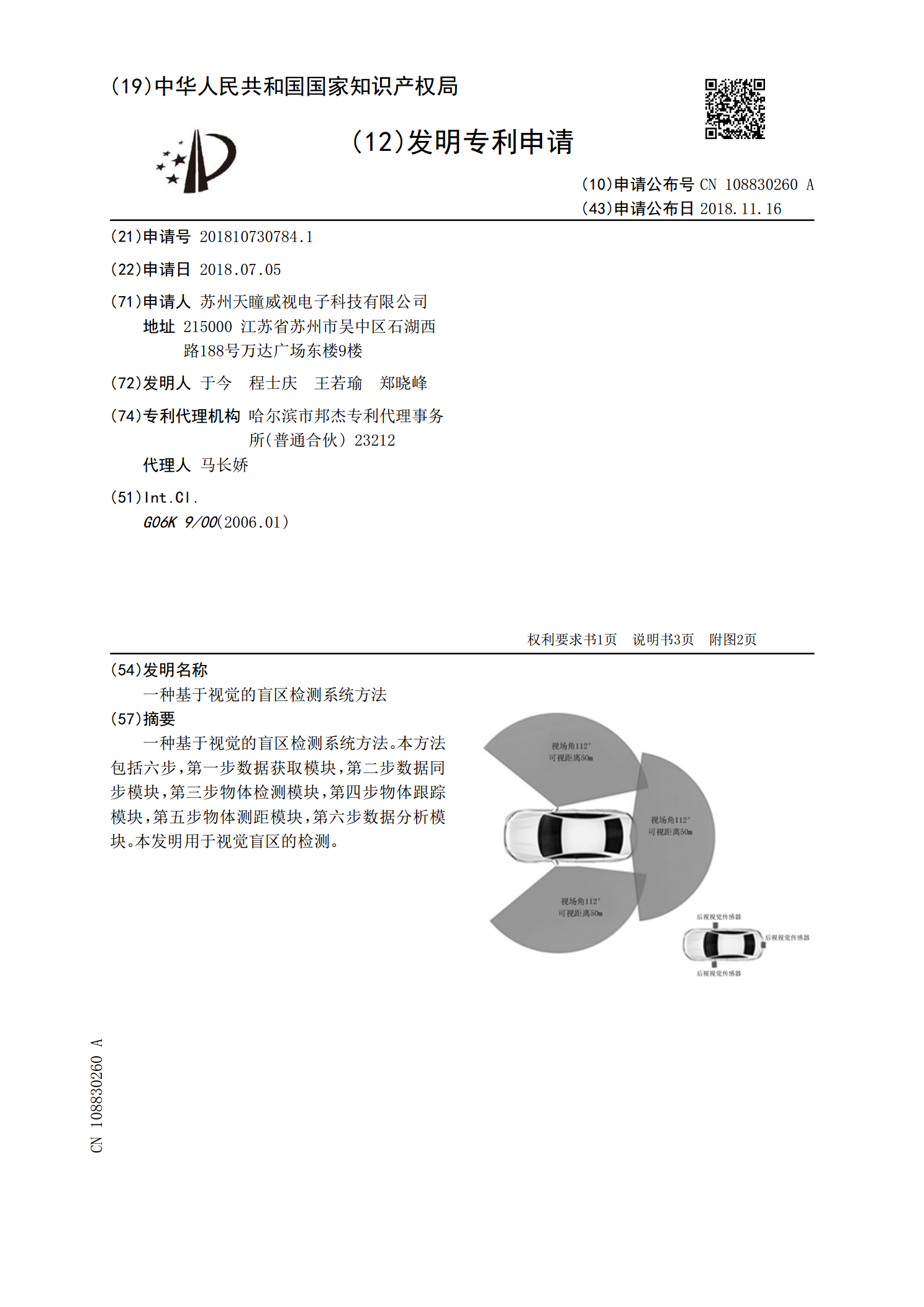
一种基于视觉的盲区检测系统方法。本方法包括六步,第一步数据获取模块,第二步数据同步模块,第三步物体检测模块,第四步物体跟踪模块,第五步物体测距模块,第六步数据分析模块。本发明用于视觉盲区的检测。
一种基于路网与可视域的盲区检测方法与系统.pdf
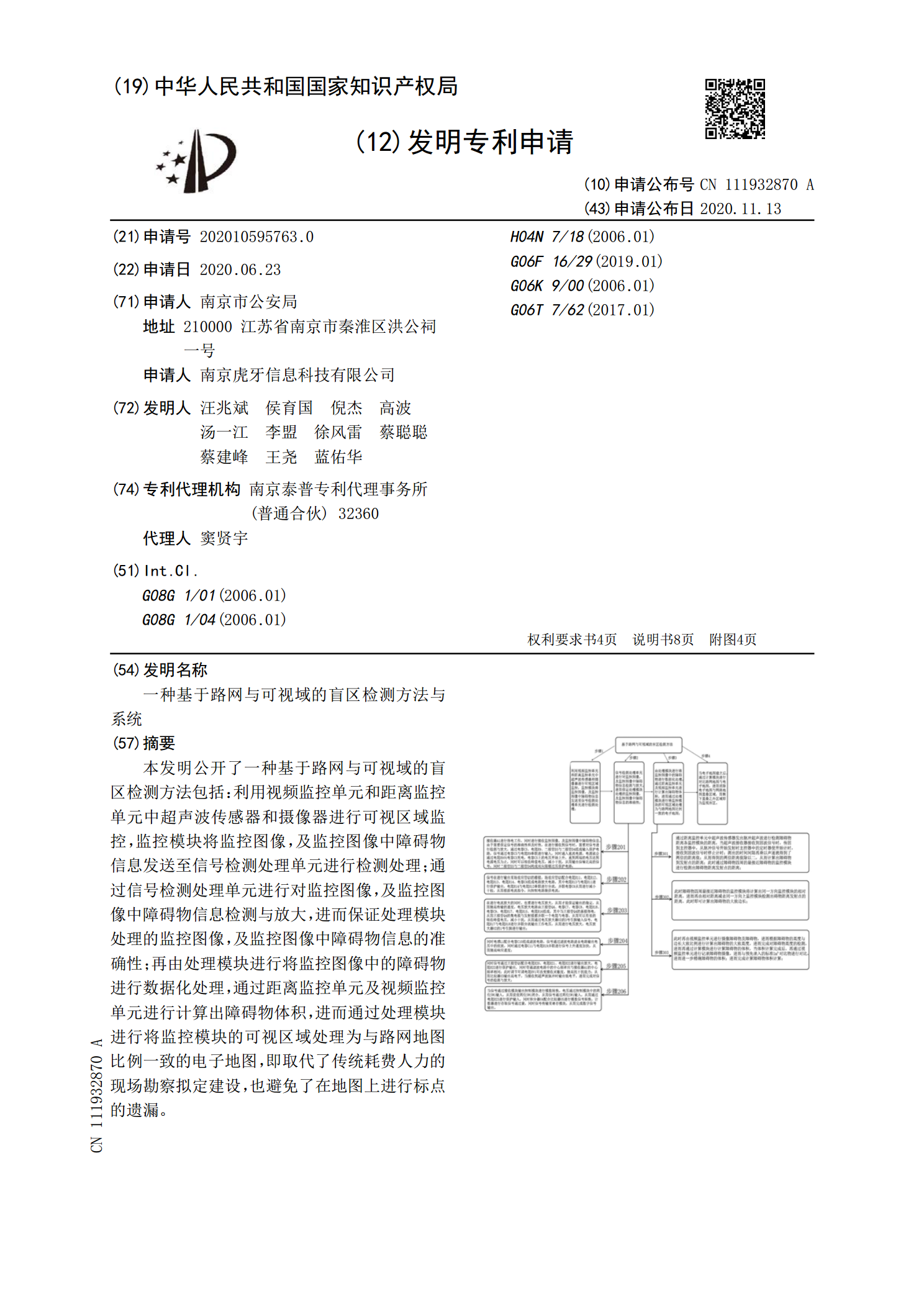
本发明公开了一种基于路网与可视域的盲区检测方法包括:利用视频监控单元和距离监控单元中超声波传感器和摄像器进行可视区域监控,监控模块将监控图像,及监控图像中障碍物信息发送至信号检测处理单元进行检测处理;通过信号检测处理单元进行对监控图像,及监控图像中障碍物信息检测与放大,进而保证处理模块处理的监控图像,及监控图像中障碍物信息的准确性;再由处理模块进行将监控图像中的障碍物进行数据化处理,通过距离监控单元及视频监控单元进行计算出障碍物体积,进而通过处理模块进行将监控模块的可视区域处理为与路网地图比例一致的电子地

一种基于机器视觉的盲区车辆检测及警告系统及方法.pdf
本发明公开一种基于机器视觉的盲区车辆检测及警告系统及方法,系统包括接口处理单元、左后视摄像头、右后视摄像头、左数字信号处理单元、右数字信号处理单元和电源模块,所述的左后视摄像头安装在汽车左后视镜处,采集汽车左侧3米及汽车后保险杠后方3米范围内的图像,并将图像传输给左数字信号处理单元,右后视摄像头安装在汽车右后视镜处,采集汽车后侧3米及汽车后保险杠后方3米范围内的图像,并将图像传输给右数字信号处理单元,经左数字信号处理单元和右数字信号处理单元处理后的图像信息传输给接口处理单元,接口处理单元控制报警装置工作,