
一种基于车辆盲区检测系统的汽车盲区检测方法.pdf

书生****35

1/9
2/9

3/9
4/9

5/9

6/9

7/9

8/9

9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种基于车辆盲区检测系统的汽车盲区检测方法.pdf
本发明公开了一种基于车辆盲区检测系统的汽车盲区检测方法。所述车辆盲区检测系统包括控制器和车辆外部侧面的多个超声波雷达;所述汽车盲区检测方法包括如下步骤:控制器控制多个超声波雷达发送数据,控制器接收到反馈的数据后计算得到每个超声波雷达测得的距离;结合多个超声波雷达检测到的目标物体的相对位置差值以及相对位置存在的时间,通过设置相对位置的差值,检测出可移动的目标物体;若检测到盲区内是可移动的目标物体,则控制器发送报警信息,提示司机谨慎驾驶。本发明可以有效检测车辆行驶时盲区内是否存在移动的目标物体,可以检测到小型
车辆盲区检测方法和车辆盲区检测系统.pdf
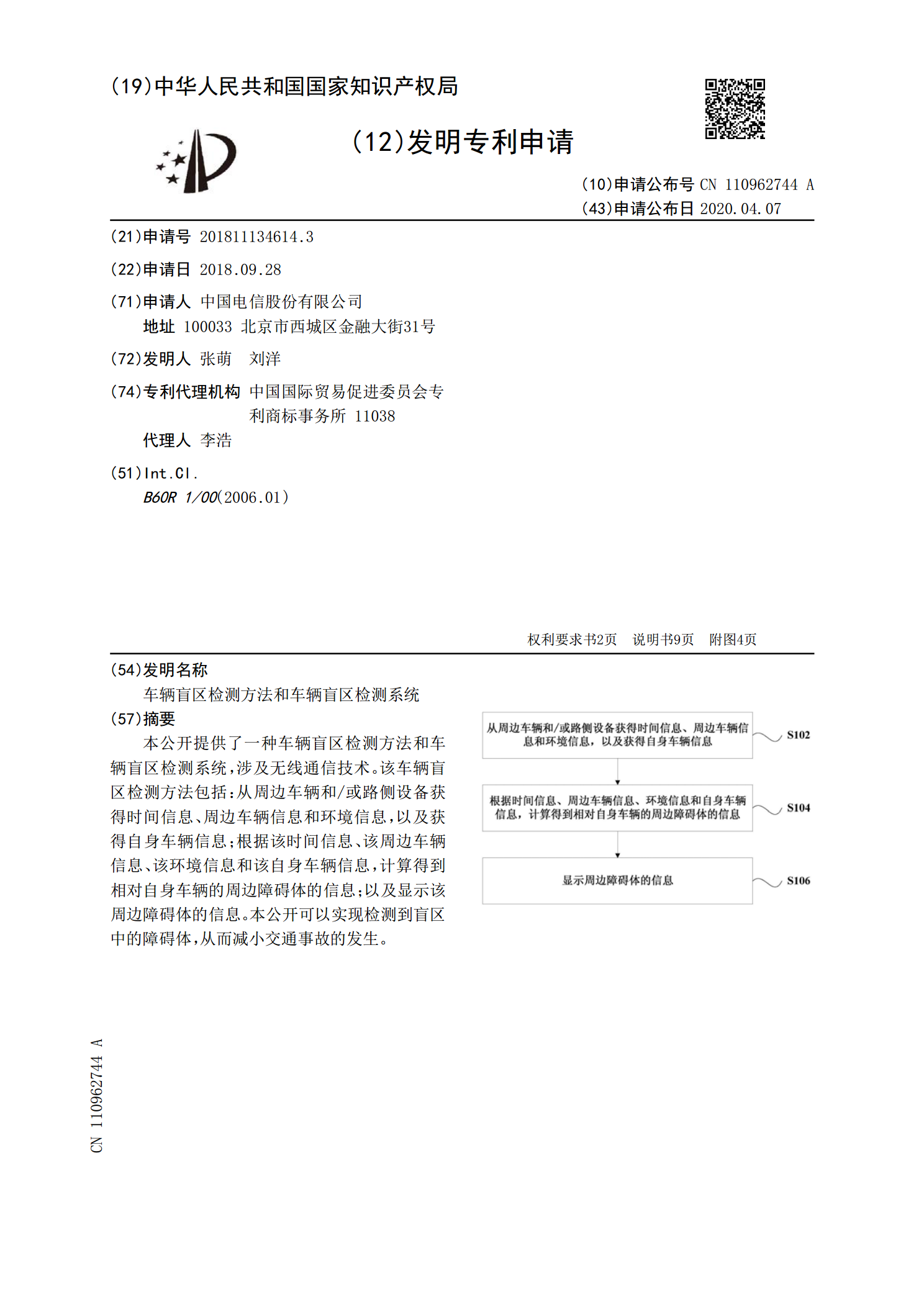
本公开提供了一种车辆盲区检测方法和车辆盲区检测系统,涉及无线通信技术。该车辆盲区检测方法包括:从周边车辆和/或路侧设备获得时间信息、周边车辆信息和环境信息,以及获得自身车辆信息;根据该时间信息、该周边车辆信息、该环境信息和该自身车辆信息,计算得到相对自身车辆的周边障碍体的信息;以及显示该周边障碍体的信息。本公开可以实现检测到盲区中的障碍体,从而减小交通事故的发生。

盲区检测系统、盲区检测方法和车辆.pdf
本发明公开了一种盲区检测系统。盲区检测系统包括多个相机、目标检测模块、目标跟踪模块和目标报警模块。多个相机用于采集车辆外多个预定区域的多个图像;目标检测模块用于提取多个图像的特征点并根据特征点获得目标;目标跟踪模块用于对目标进行跟踪并根据目标和车辆的传感器信息判断目标是否对车辆形成危险;和目标报警模块用于在目标对车辆形成危险时发出警示信息。此外,本发明还公开了一种盲区检测方法和一种车辆。本发明的盲区检测系统、盲区检测方法和车辆利用多个相机采集车辆外多个预定区域的多个图像,根据多个图像可以获取车辆外预定区域
盲区检测方法、系统及车辆.pdf
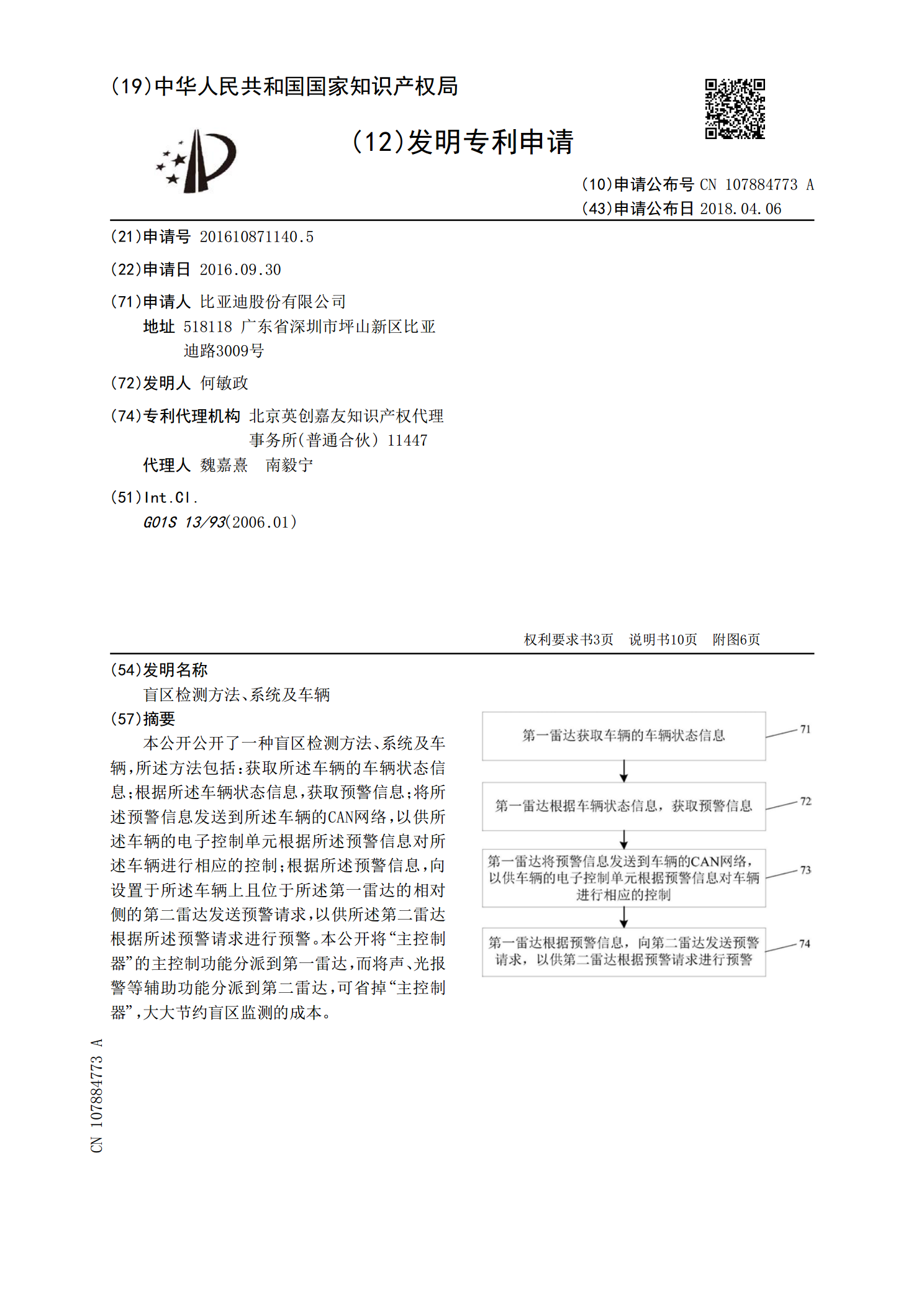
本公开公开了一种盲区检测方法、系统及车辆,所述方法包括:获取所述车辆的车辆状态信息;根据所述车辆状态信息,获取预警信息;将所述预警信息发送到所述车辆的CAN网络,以供所述车辆的电子控制单元根据所述预警信息对所述车辆进行相应的控制;根据所述预警信息,向设置于所述车辆上且位于所述第一雷达的相对侧的第二雷达发送预警请求,以供所述第二雷达根据所述预警请求进行预警。本公开将“主控制器”的主控制功能分派到第一雷达,而将声、光报警等辅助功能分派到第二雷达,可省掉“主控制器”,大大节约盲区监测的成本。
车辆盲区检测方法.pdf
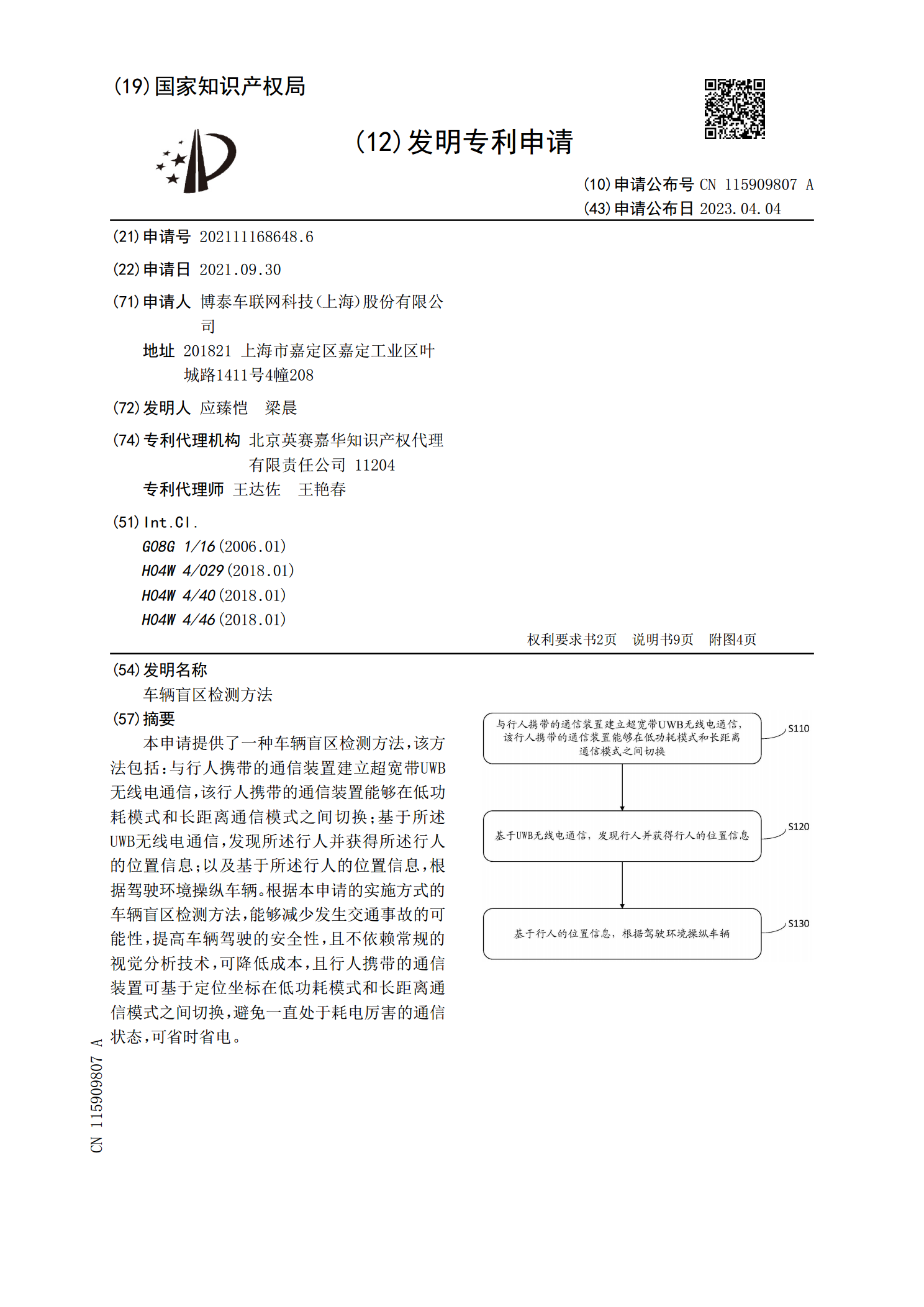
本申请提供了一种车辆盲区检测方法,该方法包括:与行人携带的通信装置建立超宽带UWB无线电通信,该行人携带的通信装置能够在低功耗模式和长距离通信模式之间切换;基于所述UWB无线电通信,发现所述行人并获得所述行人的位置信息;以及基于所述行人的位置信息,根据驾驶环境操纵车辆。根据本申请的实施方式的车辆盲区检测方法,能够减少发生交通事故的可能性,提高车辆驾驶的安全性,且不依赖常规的视觉分析技术,可降低成本,且行人携带的通信装置可基于定位坐标在低功耗模式和长距离通信模式之间切换,避免一直处于耗电厉害的通信状态,可省