
一种用于流体装卸臂自动对接实时定位的装置.pdf

Ja****20

1/10

2/10
3/10
4/10

5/10
6/10

7/10
8/10
9/10

10/10
亲,该文档总共22页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种用于流体装卸臂自动对接实时定位的装置.pdf
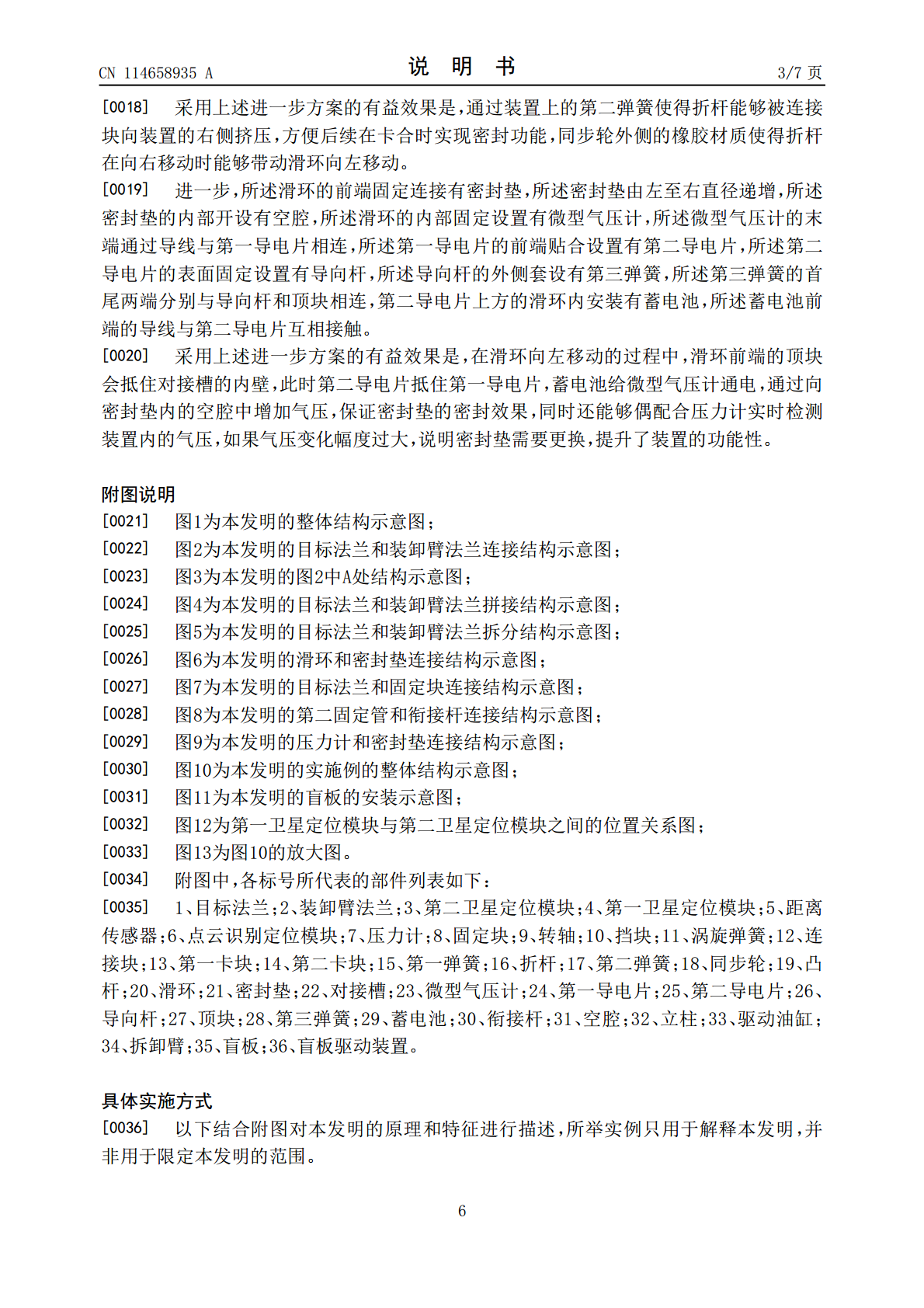
本发明涉及流体装卸臂自动对接技术领域,具体为一种用于流体装卸臂自动对接实时定位的装置,用于自动连接目标法兰,其特征在于,包括立柱,所述立柱的上端固定设置有驱动油缸,所述驱动油缸的驱动端固定设置有拆卸臂,所述拆卸臂远离立柱的一端固定设置有装卸臂法兰,所述装卸臂法兰上设置有盲板以及用于让盲板翻转的盲板驱动装置。本发明的有益效果是:该用于流体装卸臂自动对接实时定位的装置,在现有的基础上进行改进,利用装置上的卫星定位模块和自动对接结构以及密封性检测结构,使得装置能够自动进行对接和密封,而且还能够对密封性进行检测。

一种自动定位机械臂走桥装置及用于竖炉维修的定位方法.pdf
本发明涉及一种自动定位机械臂走桥装置,其特征在于,包括箱型本体、机械臂平台、推进器、电动顶杆、电动自攻转头、电控箱;箱型本体是金属型钢组成的多边形正棱柱体框架结构,与箱型本体中心线对称两侧设有相互配合的机械臂平台,机械臂平台下部与固定在箱型本体底框的支座活动铰接,机械臂平台上部与推进器推杆前端活动铰接,推进器推杆后端与箱型本体边框活动铰接,两侧机械臂平台由推进器推动,从收缩状态展开,相互配合形成一条水平的走桥平台;机械臂平台前端的内部对称设有用于支撑的电动顶杆,外部对称设有电动自攻转头。本发明可实现走桥装
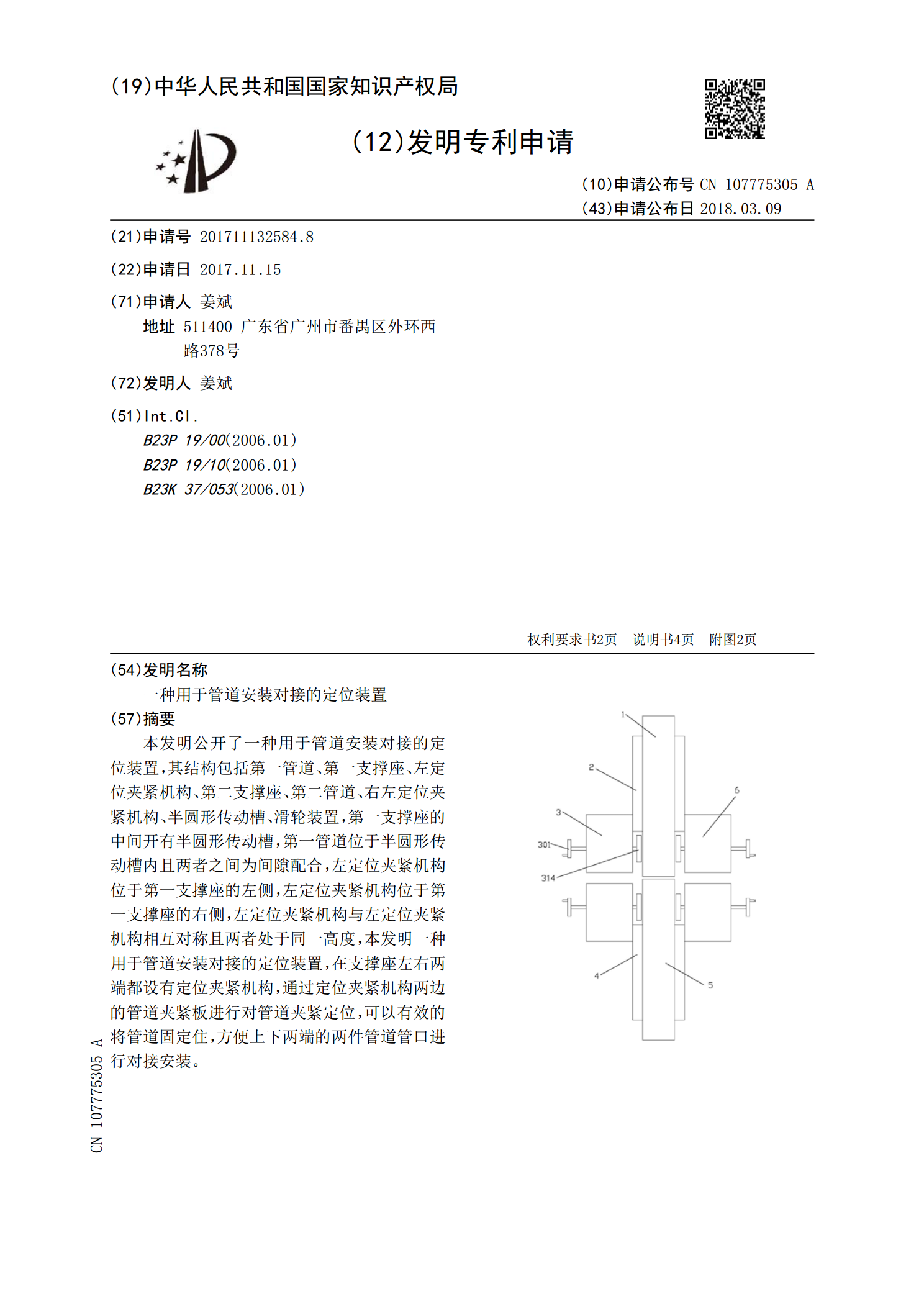
一种用于管道安装对接的定位装置.pdf
本发明公开了一种用于管道安装对接的定位装置,其结构包括第一管道、第一支撑座、左定位夹紧机构、第二支撑座、第二管道、右左定位夹紧机构、半圆形传动槽、滑轮装置,第一支撑座的中间开有半圆形传动槽,第一管道位于半圆形传动槽内且两者之间为间隙配合,左定位夹紧机构位于第一支撑座的左侧,左定位夹紧机构位于第一支撑座的右侧,左定位夹紧机构与左定位夹紧机构相互对称且两者处于同一高度,本发明一种用于管道安装对接的定位装置,在支撑座左右两端都设有定位夹紧机构,通过定位夹紧机构两边的管道夹紧板进行对管道夹紧定位,可以有效的将管道
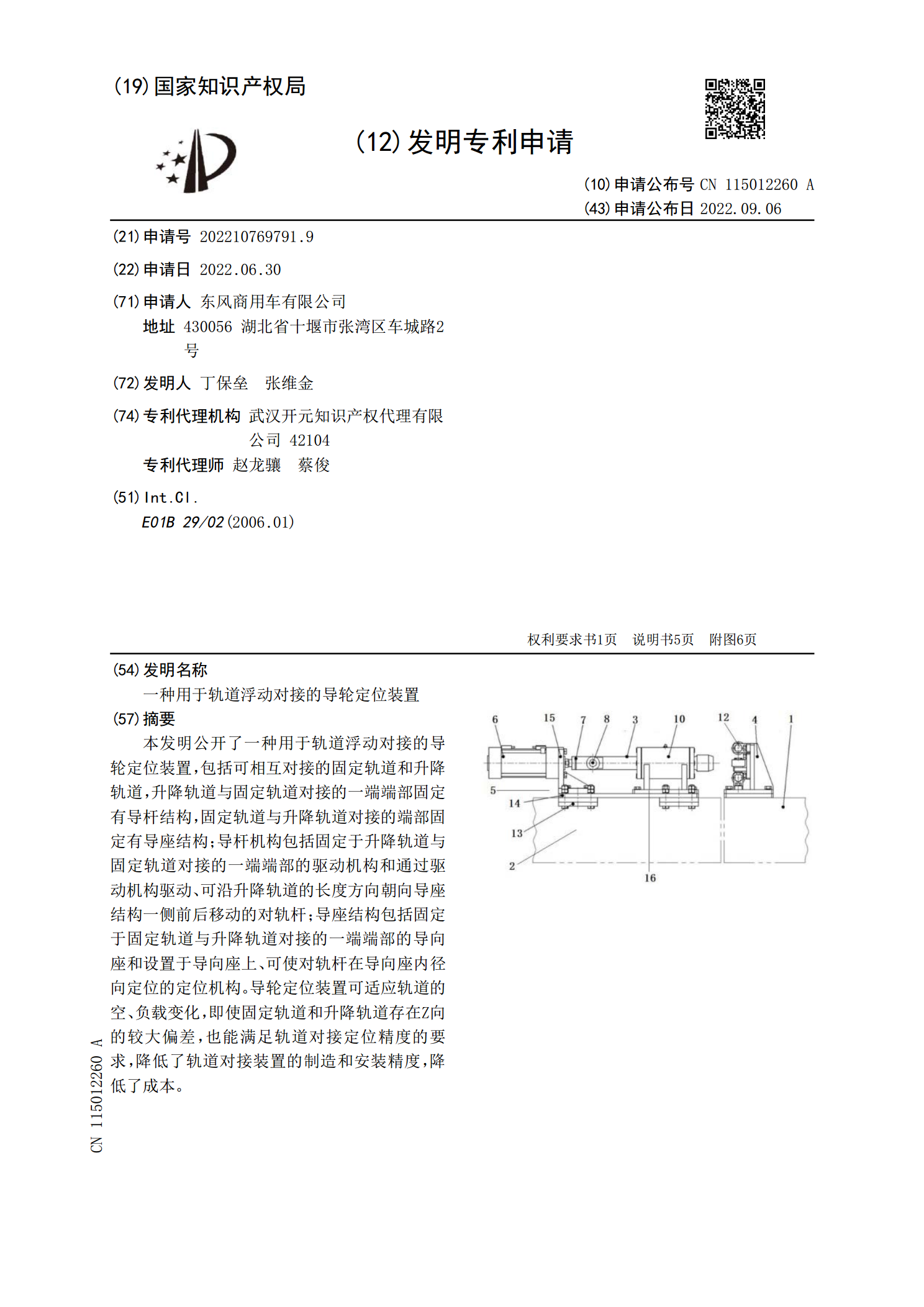
一种用于轨道浮动对接的导轮定位装置.pdf
本发明公开了一种用于轨道浮动对接的导轮定位装置,包括可相互对接的固定轨道和升降轨道,升降轨道与固定轨道对接的一端端部固定有导杆结构,固定轨道与升降轨道对接的端部固定有导座结构;导杆机构包括固定于升降轨道与固定轨道对接的一端端部的驱动机构和通过驱动机构驱动、可沿升降轨道的长度方向朝向导座结构一侧前后移动的对轨杆;导座结构包括固定于固定轨道与升降轨道对接的一端端部的导向座和设置于导向座上、可使对轨杆在导向座内径向定位的定位机构。导轮定位装置可适应轨道的空、负载变化,即使固定轨道和升降轨道存在Z向的较大偏差,也
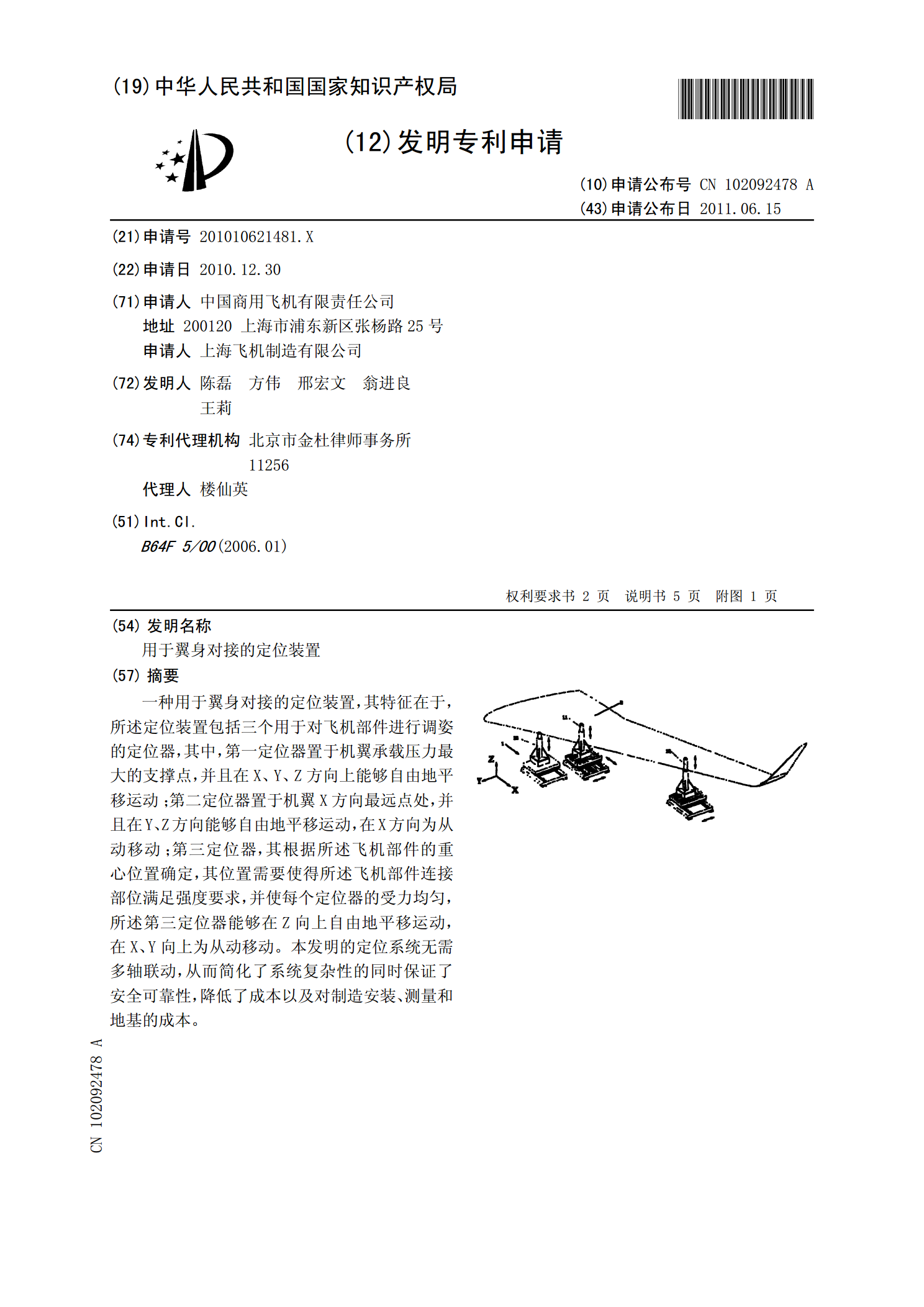
用于翼身对接的定位装置.pdf
一种用于翼身对接的定位装置,其特征在于,所述定位装置包括三个用于对飞机部件进行调姿的定位器,其中,第一定位器置于机翼承载压力最大的支撑点,并且在X、Y、Z方向上能够自由地平移运动;第二定位器置于机翼X方向最远点处,并且在Y、Z方向能够自由地平移运动,在X方向为从动移动;第三定位器,其根据所述飞机部件的重心位置确定,其位置需要使得所述飞机部件连接部位满足强度要求,并使每个定位器的受力均匀,所述第三定位器能够在Z向上自由地平移运动,在X、Y向上为从动移动。本发明的定位系统无需多轴联动,从而简化了系统复杂性的同