
一种车辆盲区图像处理方法、装置、设备及存储介质.pdf

是丹****ni


1/10

2/10

3/10

4/10

5/10

6/10
7/10

8/10

9/10
10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种车辆盲区图像处理方法、装置、设备及存储介质.pdf
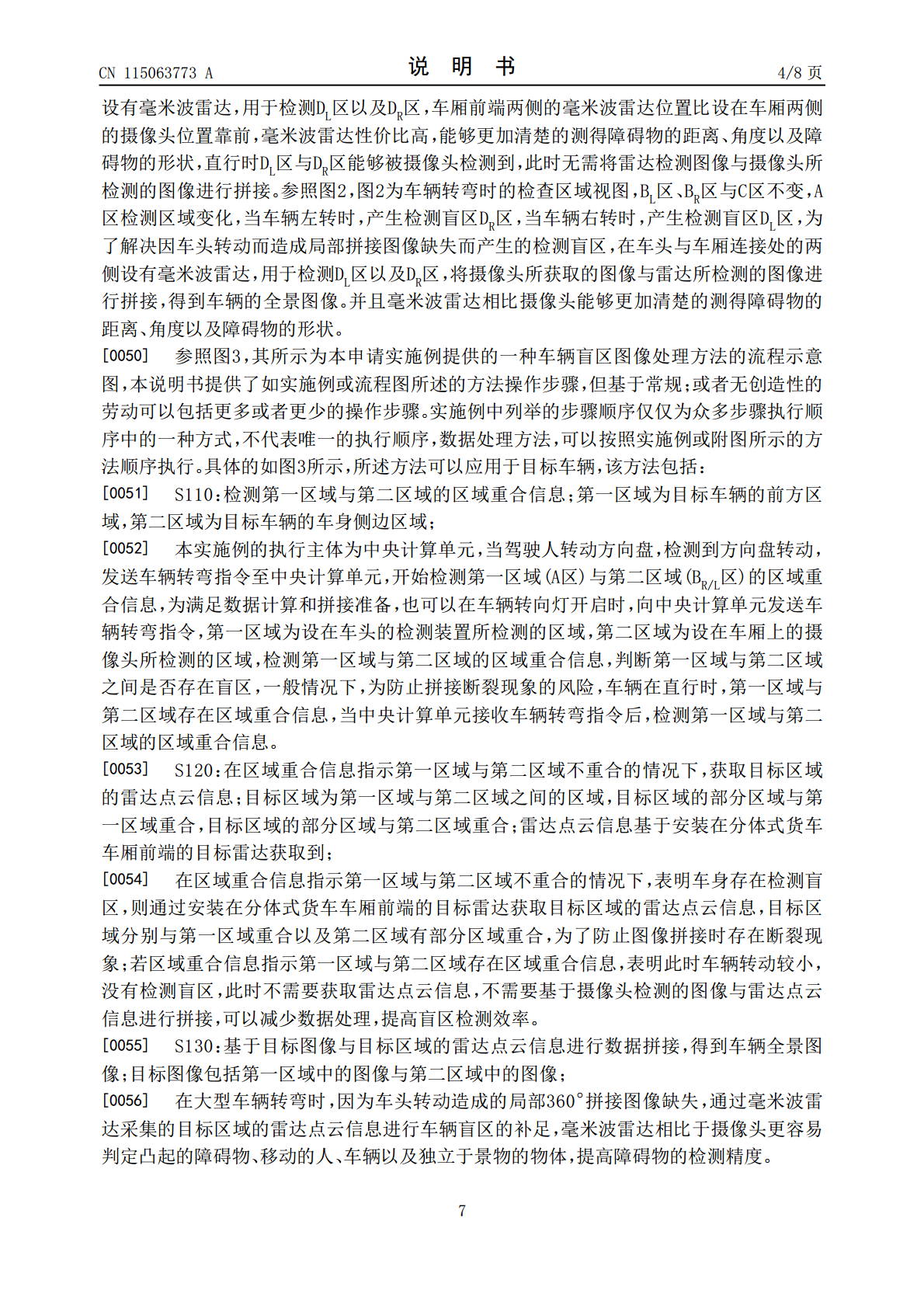
本发明公开了一种车辆盲区图像处理方法、装置、设备及存储介质,属于图像处理领域,该方法包括响应于车辆转弯指令,检测第一区域与第二区域的区域重合信息;在区域重合信息指示第一区域与第二区域不重合的情况下,获取目标区域的雷达点云信息;所述目标区域为第一区域与第二区域之间的区域;所述雷达点云信息基于安装在分体式货车车厢前端的目标雷达获取到;基于目标图像与目标区域的雷达点云信息进行数据拼接,得到车辆全景图像;目标图像包括第一区域中的图像与第二区域中的图像;解决了因车头转动而造成局部拼接图像缺失产生的检测盲区,并且能够
车辆盲区处理方法、装置、车载终端及存储介质.pdf
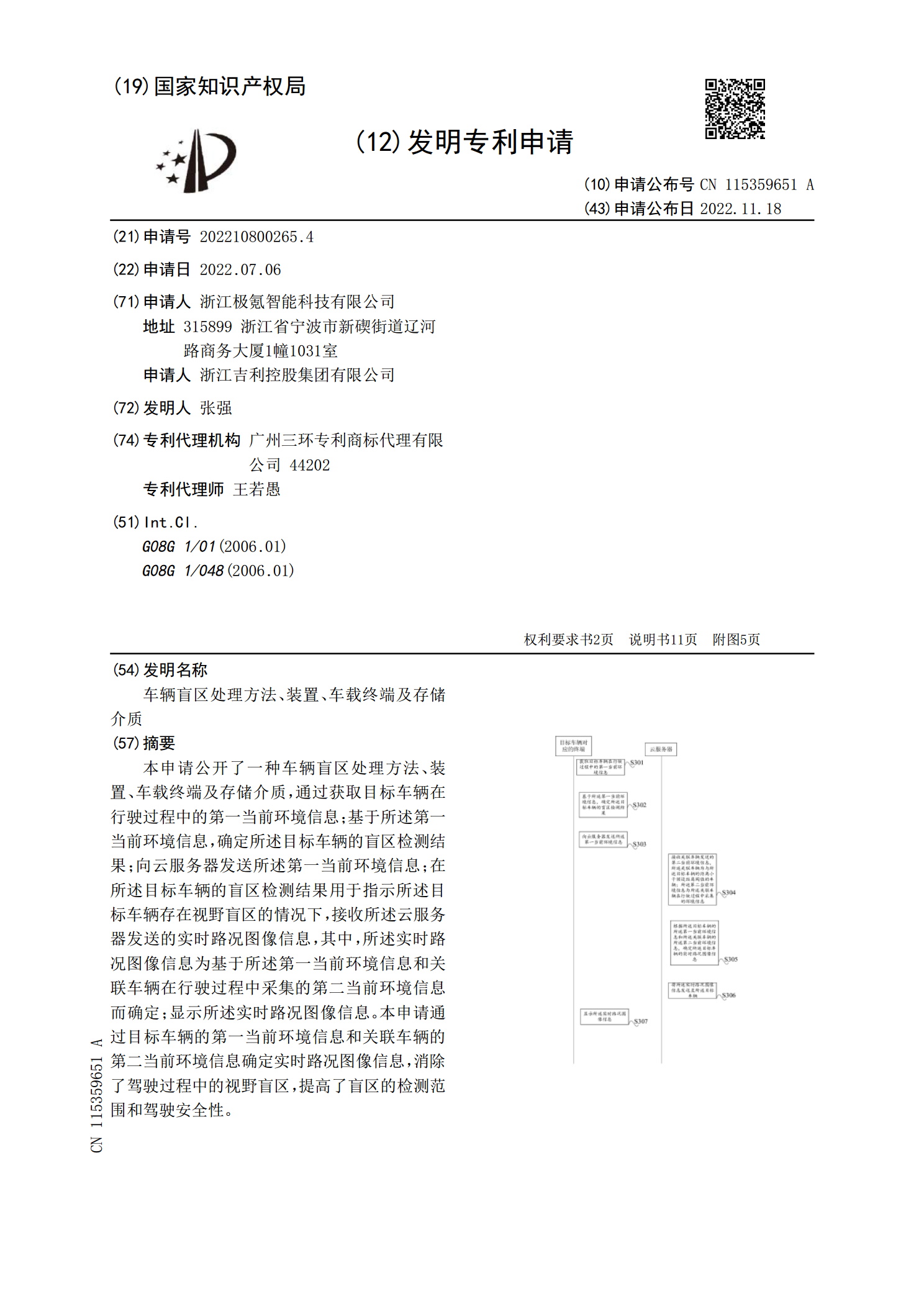
本申请公开了一种车辆盲区处理方法、装置、车载终端及存储介质,通过获取目标车辆在行驶过程中的第一当前环境信息;基于所述第一当前环境信息,确定所述目标车辆的盲区检测结果;向云服务器发送所述第一当前环境信息;在所述目标车辆的盲区检测结果用于指示所述目标车辆存在视野盲区的情况下,接收所述云服务器发送的实时路况图像信息,其中,所述实时路况图像信息为基于所述第一当前环境信息和关联车辆在行驶过程中采集的第二当前环境信息而确定;显示所述实时路况图像信息。本申请通过目标车辆的第一当前环境信息和关联车辆的第二当前环境信息确定
图像处理方法、装置、车辆、存储介质及芯片.pdf
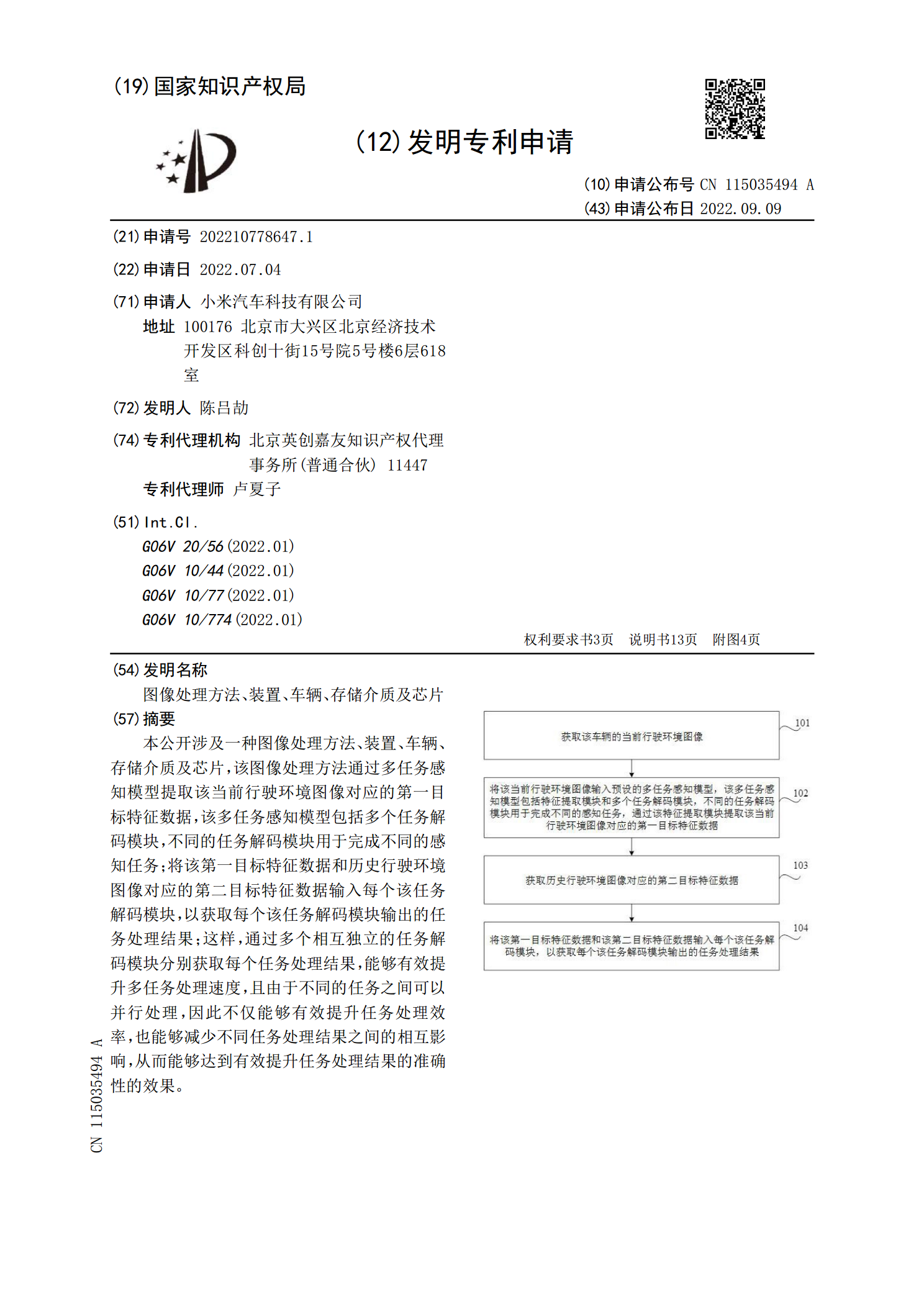
本公开涉及一种图像处理方法、装置、车辆、存储介质及芯片,该图像处理方法通过多任务感知模型提取该当前行驶环境图像对应的第一目标特征数据,该多任务感知模型包括多个任务解码模块,不同的任务解码模块用于完成不同的感知任务;将该第一目标特征数据和历史行驶环境图像对应的第二目标特征数据输入每个该任务解码模块,以获取每个该任务解码模块输出的任务处理结果;这样,通过多个相互独立的任务解码模块分别获取每个任务处理结果,能够有效提升多任务处理速度,且由于不同的任务之间可以并行处理,因此不仅能够有效提升任务处理效率,也能够减少
车辆行驶盲区校准方法、装置、设备及存储介质.pdf
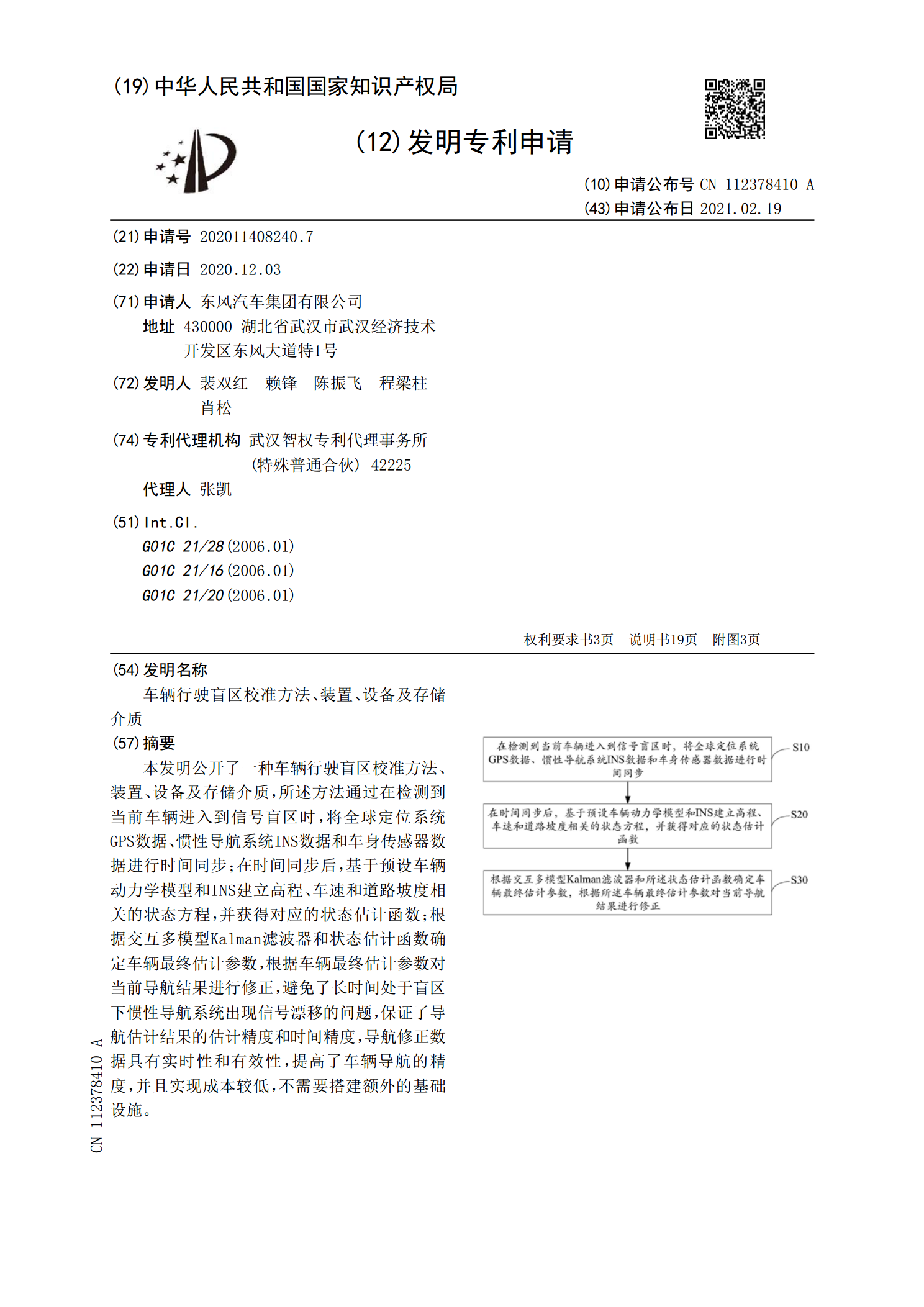
本发明公开了一种车辆行驶盲区校准方法、装置、设备及存储介质,所述方法通过在检测到当前车辆进入到信号盲区时,将全球定位系统GPS数据、惯性导航系统INS数据和车身传感器数据进行时间同步;在时间同步后,基于预设车辆动力学模型和INS建立高程、车速和道路坡度相关的状态方程,并获得对应的状态估计函数;根据交互多模型Kalman滤波器和状态估计函数确定车辆最终估计参数,根据车辆最终估计参数对当前导航结果进行修正,避免了长时间处于盲区下惯性导航系统出现信号漂移的问题,保证了导航估计结果的估计精度和时间精度,导航修正数

车辆视觉盲区的指示方法、装置、设备及存储介质.pdf
本发明属于车辆控制领域,公开了一种车辆视觉盲区的指示方法、装置、设备及存储介质。本发明实施例方法包:获取所述第一摄像装置拍摄的第一原始图像及所述第二摄像装置拍摄的第二原始图像;根据所述第一原始图像和所述第二原始图像进行图像合成,得到所述车辆右侧视觉盲区的合成图像;对所述合成图像进行加权处理,得到加权后合成图像;在所述加权后合成图像上绘制安全距离警示线,以指示车辆在车辆右侧视觉盲区与车身的安全距离。本发明实施例可以达到消除车辆右前方视觉盲区的效果,同时,在加权后合成图像的画面上根据实际安全距离绘制安全距离预