
一种基于权重掩膜的全景环视系统及全景图像融合方法.pdf

是你****盟主


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共18页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种基于权重掩膜的全景环视系统及全景图像融合方法.pdf
本发明涉及一种基于权重掩膜的全景环视系及全景图像融合方法,属于辅助驾驶领域。系统包括多个鱼眼摄像头、角度传感器、图像数据采集器、图像数据处理器和显示屏;鱼眼摄像头用于采集车外环境图像;角度传感器用于采集车间夹角数据;图像数据采集器用于将收集到的车外环境图像和车间夹角数据传输至图像数据处理器;图像数据处理器用于采用权重掩膜处理方法对车外环境图像和车间夹角数据进行处理,生成全景环视图像;显示屏用于显示全景环视图像。本发明能够较好地将多个鱼眼摄像头的图像融合,视野范围大并且没有视野盲区,保障车辆的安全驾驶。

一种基于全景环视图像处理的车门开启预警系统及方法.pdf
本发明涉及一种基于全景环视图像处理的车门开启预警系统及方法,所述系统包括AVM控制器、车门检测模块、摄像头模块及娱乐显示屏;所述AVM控制器用于当根据车门检测控制器发送的CAN网络信号判断当前车辆的车门开启或关闭时,根据摄像头模块采集的车辆四个方向的图像信息在娱乐显示屏上生成全景鸟瞰图,并根据CAN网络信号在全景鸟瞰图的车模上模拟对应车门开启或关闭,同时根据车辆开启或关闭的车门对应的图像信息,判断车门开启或关闭时的活动区域内是否存在障碍物,若存在障碍物,则向娱乐显示屏发送预警信息。提醒用户车门开启或关闭过

一种车辆的全景环视图像提供方法、装置及系统.pdf
本发明实施例公开一种车辆的全景环视图像提供方法、装置及系统,涉及汽车技术领域,能够有效改善全景环视图像的展示效果,大大提升用户体验。所述方法包括:根据车辆的观察场景选择指令,从至少两个备选场景中,选择目标场景;为所述目标场景构建对应的环视模型,其中不同的目标场景对应的环视模型不同;通过将车辆周围预设范围内的景物图像映射到所述环视模型,展示车辆的全景环视图像。本发明适用于汽车的全景环视系统中。

基于全景环视系统的车辆整车质量估计方法.pdf
基于全景环视系统的车辆整车质量估计方法,在车辆全程的运行过程中,车辆整车质量估计系统调取全景环视系统中的全景环视影像图片,通过车辆占据像素矩阵模型的像素点阵集合与车辆整车质量估计系统中存储的Mi与Si的映射关系即可得到当前车辆整车质量。本发明结构简单,无需安装其他传感器,使用方便,可重点在道路货运车辆中应用,通过对全景环视系统的数据处理,实时获取货运车辆整车质量,一方面,将货运车辆整车质量作为车辆稳定性控制系统输入可有效提高车辆运行安全;另一方面,可以判定车辆是否超载运输且用于道路货运量的统计和分析。
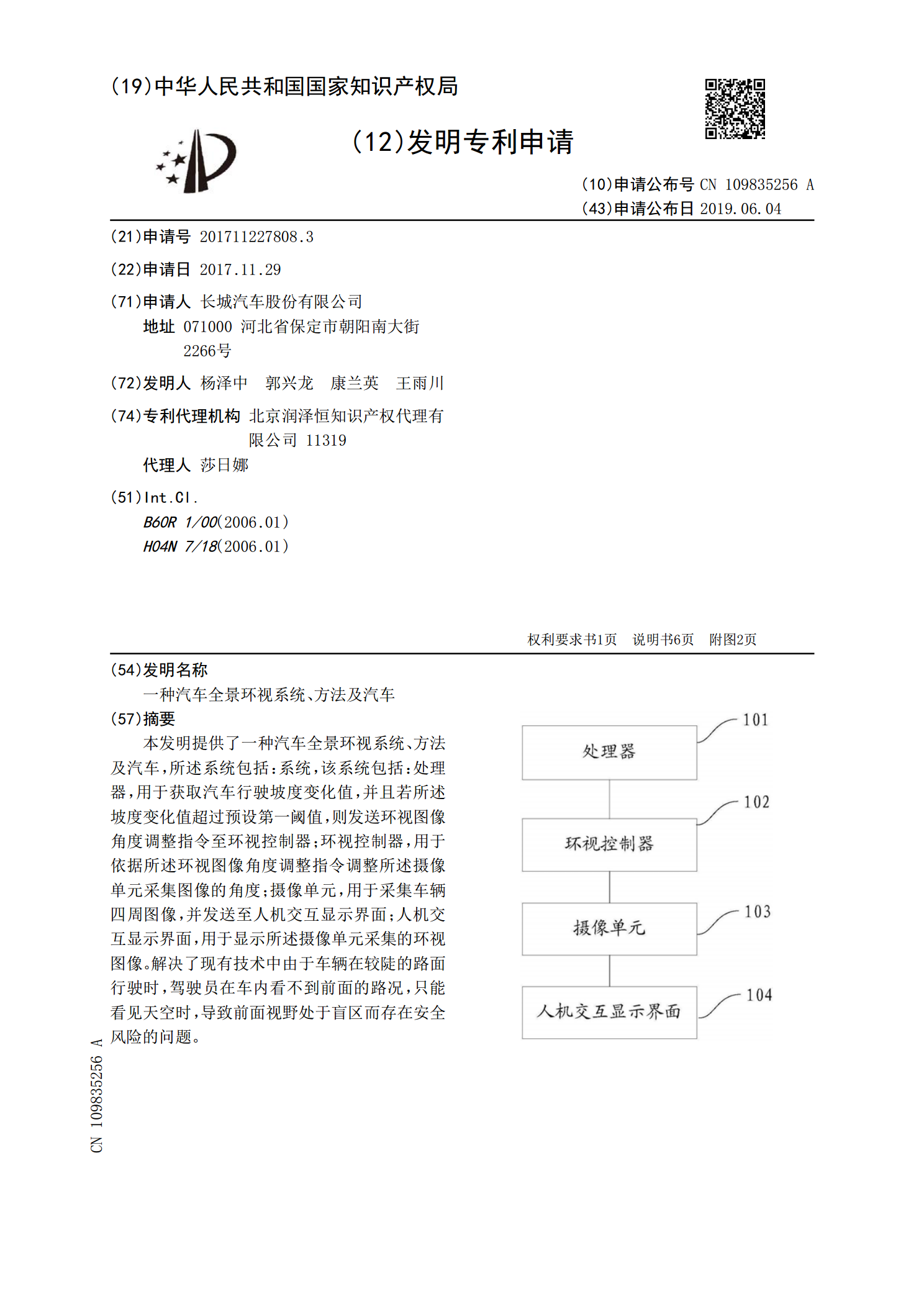
一种汽车全景环视系统、方法及汽车.pdf
本发明提供了一种汽车全景环视系统、方法及汽车,所述系统包括:系统,该系统包括:处理器,用于获取汽车行驶坡度变化值,并且若所述坡度变化值超过预设第一阈值,则发送环视图像角度调整指令至环视控制器;环视控制器,用于依据所述环视图像角度调整指令调整所述摄像单元采集图像的角度;摄像单元,用于采集车辆四周图像,并发送至人机交互显示界面;人机交互显示界面,用于显示所述摄像单元采集的环视图像。解决了现有技术中由于车辆在较陡的路面行驶时,驾驶员在车内看不到前面的路况,只能看见天空时,导致前面视野处于盲区而存在安全风险的问题