
盲区记忆方法、设备、移动装置和存储介质.pdf

英哲****公主


1/10

2/10

3/10

4/10
5/10
6/10
7/10

8/10
9/10

10/10
亲,该文档总共17页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
盲区记忆方法、设备、移动装置和存储介质.pdf
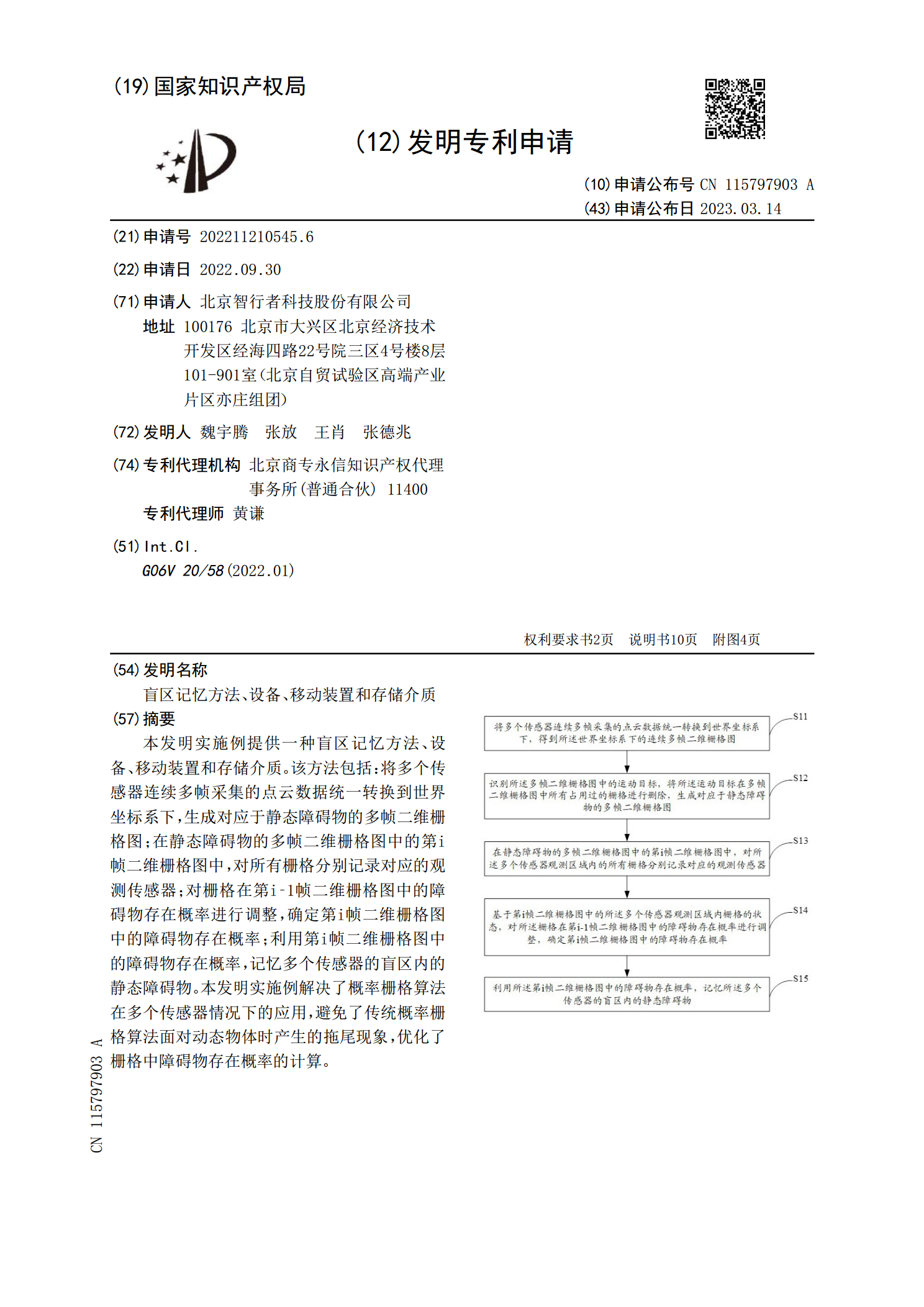
本发明实施例提供一种盲区记忆方法、设备、移动装置和存储介质。该方法包括:将多个传感器连续多帧采集的点云数据统一转换到世界坐标系下,生成对应于静态障碍物的多帧二维栅格图;在静态障碍物的多帧二维栅格图中的第i帧二维栅格图中,对所有栅格分别记录对应的观测传感器;对栅格在第i‑1帧二维栅格图中的障碍物存在概率进行调整,确定第i帧二维栅格图中的障碍物存在概率;利用第i帧二维栅格图中的障碍物存在概率,记忆多个传感器的盲区内的静态障碍物。本发明实施例解决了概率栅格算法在多个传感器情况下的应用,避免了传统概率栅格算法面对

盲区提醒方法、装置、设备及存储介质.pdf
本发明公开了一种盲区提醒方法、装置、设备及存储介质。该方法包括:获取当前车速信息、当前车道转向标识以及前方红绿灯信息;基于上述信息确定由当前位置到达交叉路口的预估时间和确定交叉路口通行工况;在交叉路口通行工况为无右转红绿灯右转工况时,通过目标雷达检测盲区目标物;在预估时间达到预设时间时,通过目标投影设备在车辆两侧投射提示点阵,以提示左右侧盲区;在检测到车辆通过交叉路口后,关闭目标雷达和目标投影设备。通过上述方式,当车辆通过交叉路口或人行道时,实时检测盲区目标物,并通过投影设备在盲区投射提示点阵,以提示行人
盲区监测方法、系统、设备及存储介质.pdf
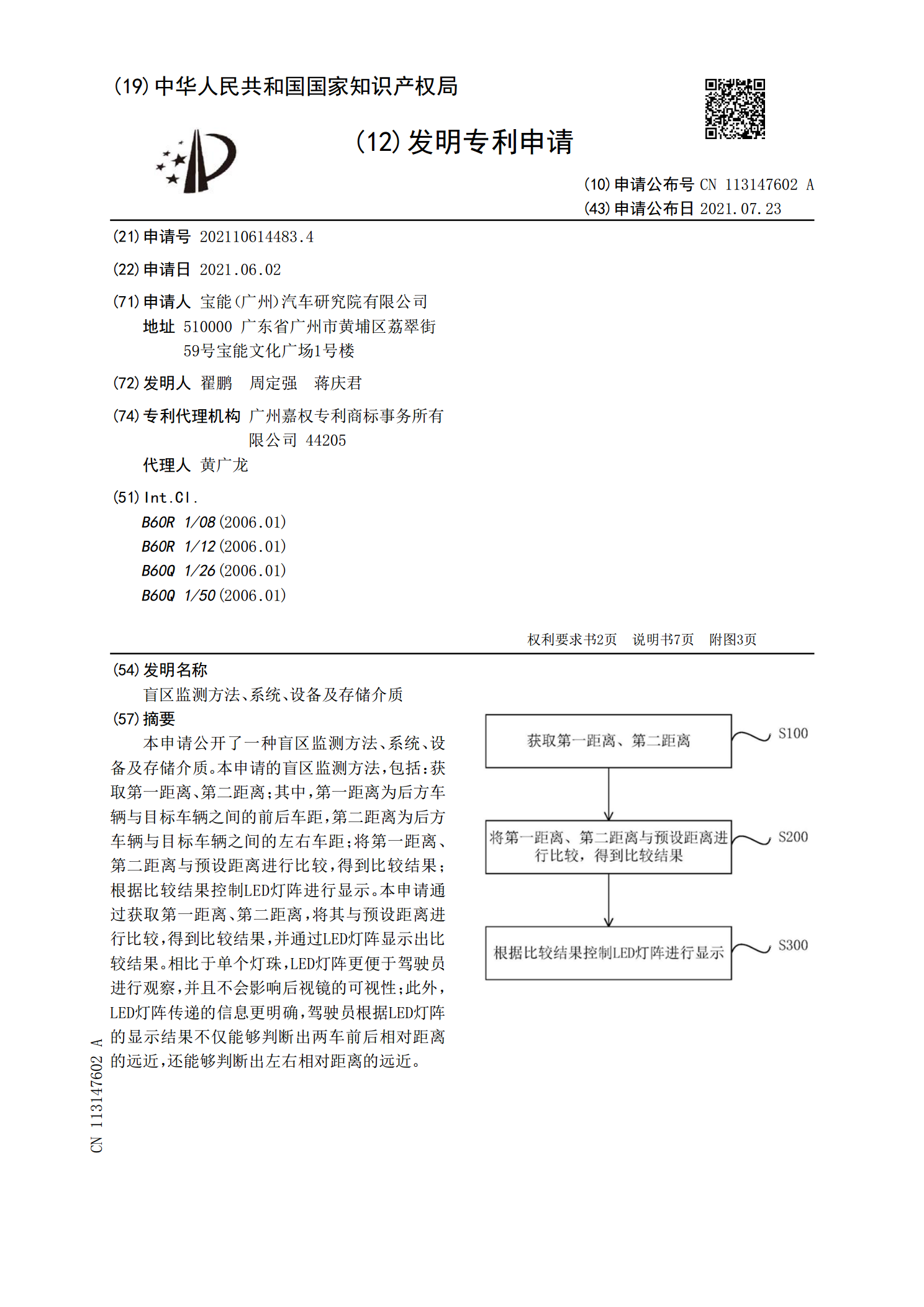
本申请公开了一种盲区监测方法、系统、设备及存储介质。本申请的盲区监测方法,包括:获取第一距离、第二距离;其中,第一距离为后方车辆与目标车辆之间的前后车距,第二距离为后方车辆与目标车辆之间的左右车距;将第一距离、第二距离与预设距离进行比较,得到比较结果;根据比较结果控制LED灯阵进行显示。本申请通过获取第一距离、第二距离,将其与预设距离进行比较,得到比较结果,并通过LED灯阵显示出比较结果。相比于单个灯珠,LED灯阵更便于驾驶员进行观察,并且不会影响后视镜的可视性;此外,LED灯阵传递的信息更明确,驾驶员根
道路盲区监控方法、系统、装置、设备和存储介质.pdf
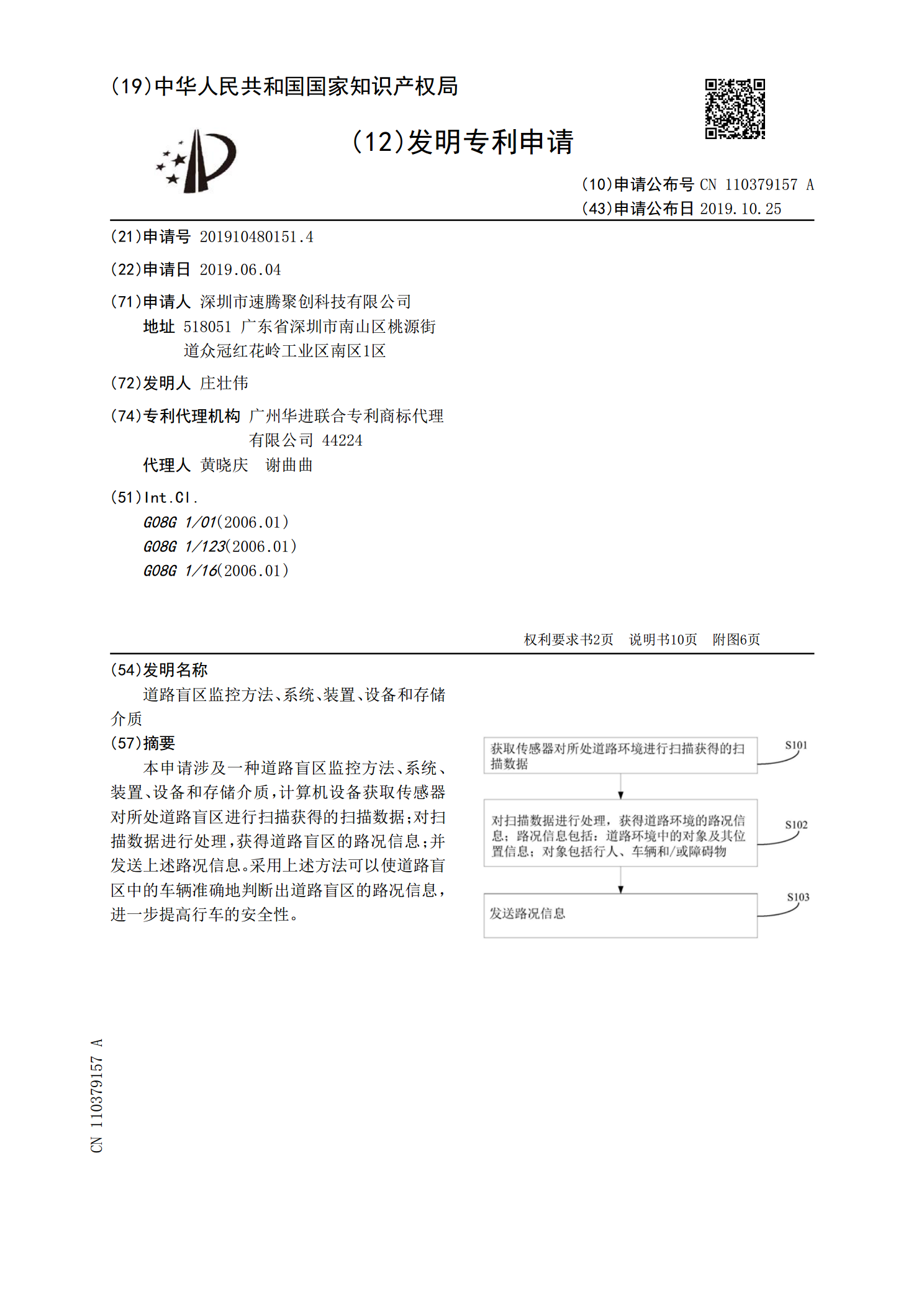
本申请涉及一种道路盲区监控方法、系统、装置、设备和存储介质,计算机设备获取传感器对所处道路盲区进行扫描获得的扫描数据;对扫描数据进行处理,获得道路盲区的路况信息;并发送上述路况信息。采用上述方法可以使道路盲区中的车辆准确地判断出道路盲区的路况信息,进一步提高行车的安全性。

雷达盲区监测方法、装置、电子设备和存储介质.pdf
本申请提供一种雷达盲区监测方法、装置、电子设备和存储介质,其中方法包括:基于激光雷达点云数据进行障碍物目标检测,确定车辆四周的障碍物以及所述障碍物的世界坐标系坐标;基于所述障碍物的世界坐标系坐标和高度、所述车辆当前的世界坐标系坐标,以及所述激光雷达的安装高度,判断所述障碍物当前是否处于所述激光雷达的盲区内;输出当前处于激光雷达的盲区内的障碍物与所述车辆间的距离。本申请提供的雷达盲区监测方法、装置、电子设备和存储介质,无需额外设置新的传感器,也无需调整激光雷达的安装高度,省去了额外的硬件成本且避免了地面物体