
雷达盲区监测方法、装置、电子设备和存储介质.pdf

元枫****文章


1/10
2/10
3/10

4/10

5/10
6/10

7/10

8/10

9/10
10/10
亲,该文档总共21页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

雷达盲区监测方法、装置、电子设备和存储介质.pdf
本申请提供一种雷达盲区监测方法、装置、电子设备和存储介质,其中方法包括:基于激光雷达点云数据进行障碍物目标检测,确定车辆四周的障碍物以及所述障碍物的世界坐标系坐标;基于所述障碍物的世界坐标系坐标和高度、所述车辆当前的世界坐标系坐标,以及所述激光雷达的安装高度,判断所述障碍物当前是否处于所述激光雷达的盲区内;输出当前处于激光雷达的盲区内的障碍物与所述车辆间的距离。本申请提供的雷达盲区监测方法、装置、电子设备和存储介质,无需额外设置新的传感器,也无需调整激光雷达的安装高度,省去了额外的硬件成本且避免了地面物体

一种雷达探测盲区计算方法及装置、存储介质和电子设备.pdf
本发明公开了一种雷达探测盲区计算方法及装置。雷达探测盲区计算方法,包括:获得数字下变频雷达数据;对所述雷达数据末尾补充N个零获得补零数据,其中,N为滤波器系数的个数;利用现场可编程门阵列中的有限长单位冲激响应滤波器对所述补零数据进行脉冲压缩;对脉冲压缩后的数据进行目标解算。本发明实施例的雷达探测盲区计算方法及装置,雷达性能高,近距离探测概率高。
一种盲区监测方法、装置、电子设备及存储介质.pdf
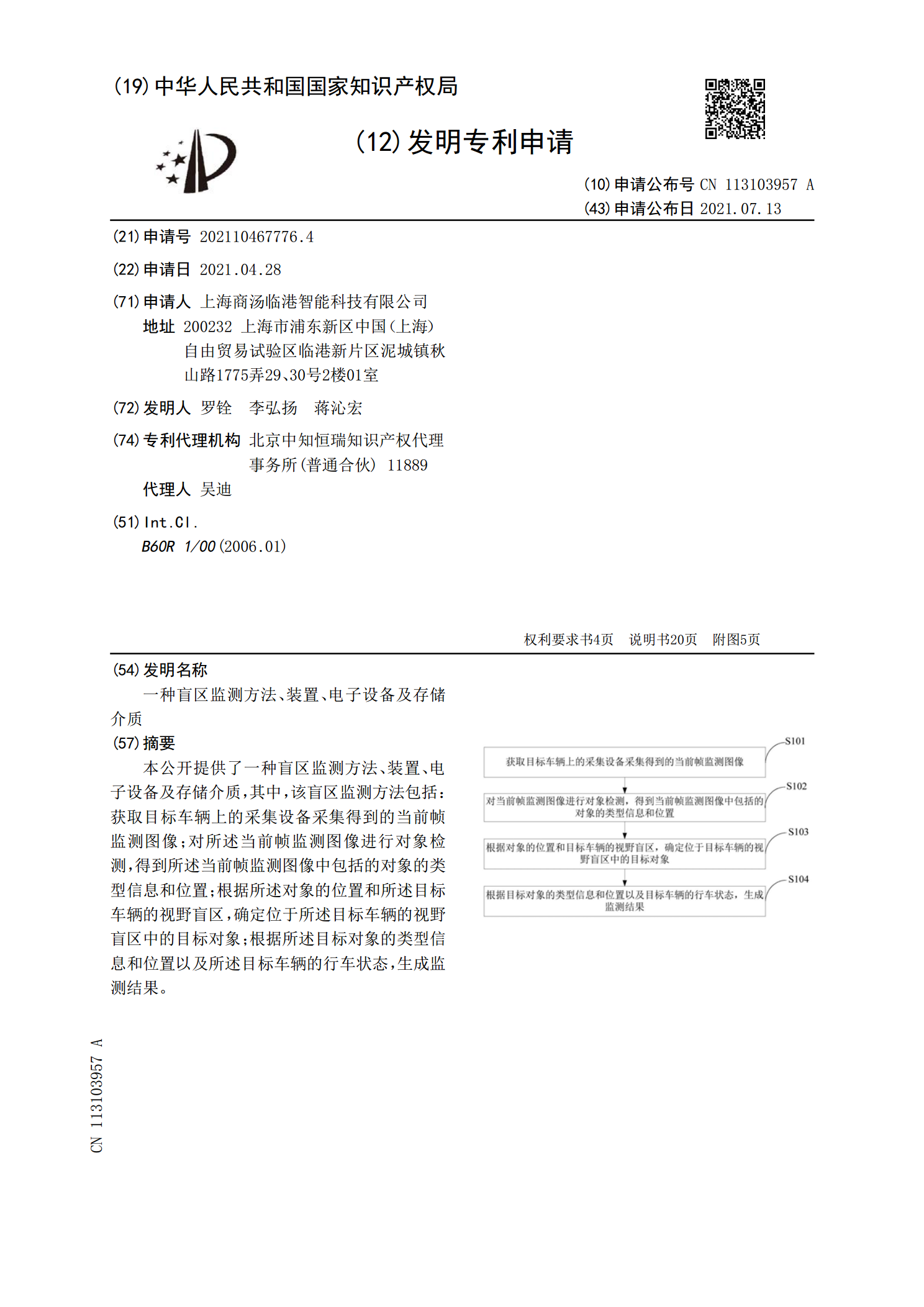
本公开提供了一种盲区监测方法、装置、电子设备及存储介质,其中,该盲区监测方法包括:获取目标车辆上的采集设备采集得到的当前帧监测图像;对所述当前帧监测图像进行对象检测,得到所述当前帧监测图像中包括的对象的类型信息和位置;根据所述对象的位置和所述目标车辆的视野盲区,确定位于所述目标车辆的视野盲区中的目标对象;根据所述目标对象的类型信息和位置以及所述目标车辆的行车状态,生成监测结果。
双脉冲盲区信号处理方法、装置、雷达及存储介质.pdf
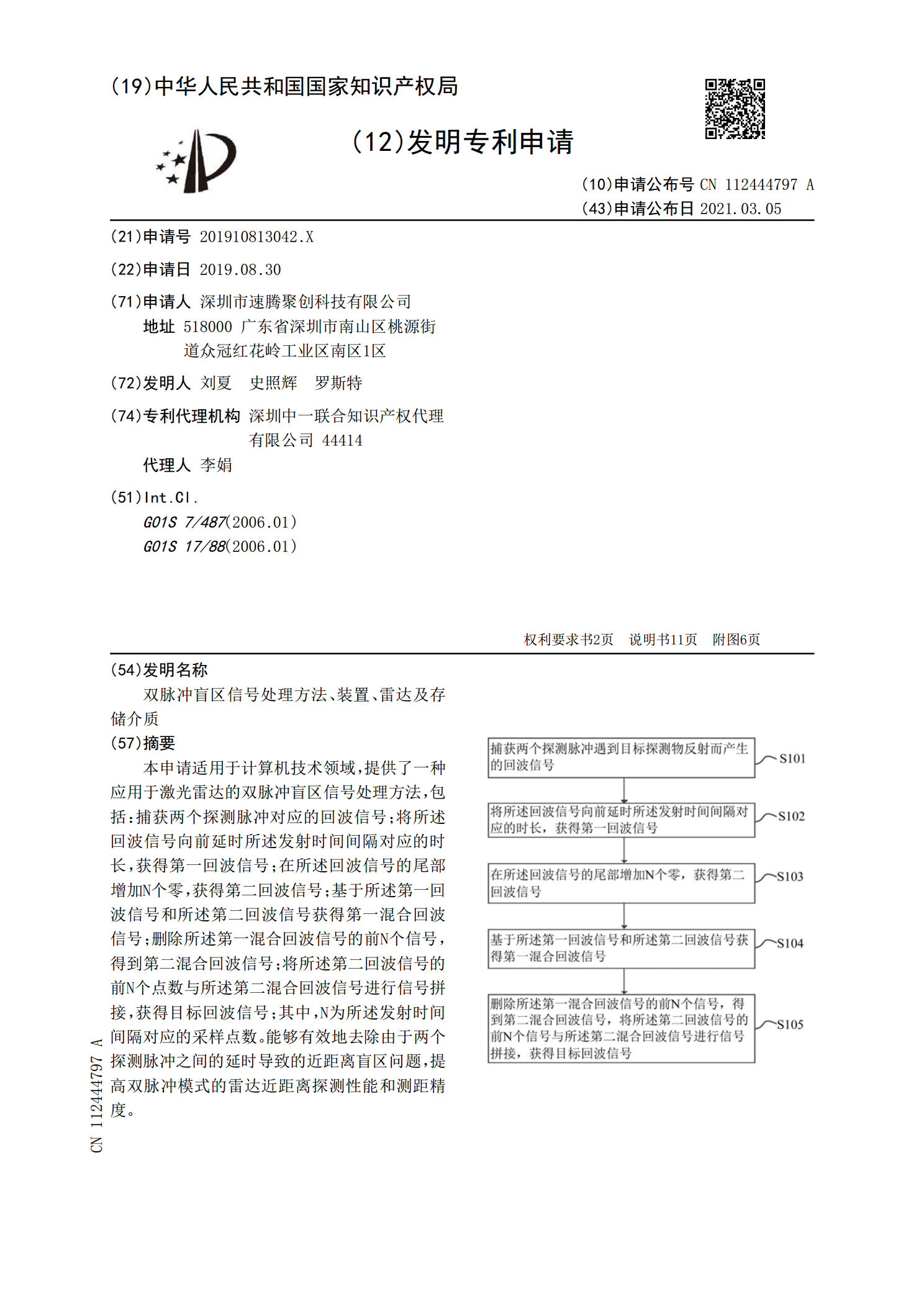
本申请适用于计算机技术领域,提供了一种应用于激光雷达的双脉冲盲区信号处理方法,包括:捕获两个探测脉冲对应的回波信号;将所述回波信号向前延时所述发射时间间隔对应的时长,获得第一回波信号;在所述回波信号的尾部增加N个零,获得第二回波信号;基于所述第一回波信号和所述第二回波信号获得第一混合回波信号;删除所述第一混合回波信号的前N个信号,得到第二混合回波信号;将所述第二回波信号的前N个点数与所述第二混合回波信号进行信号拼接,获得目标回波信号;其中,N为所述发射时间间隔对应的采样点数。能够有效地去除由于两个探测脉冲
成像方法、装置、雷达系统、电子设备和存储介质.pdf
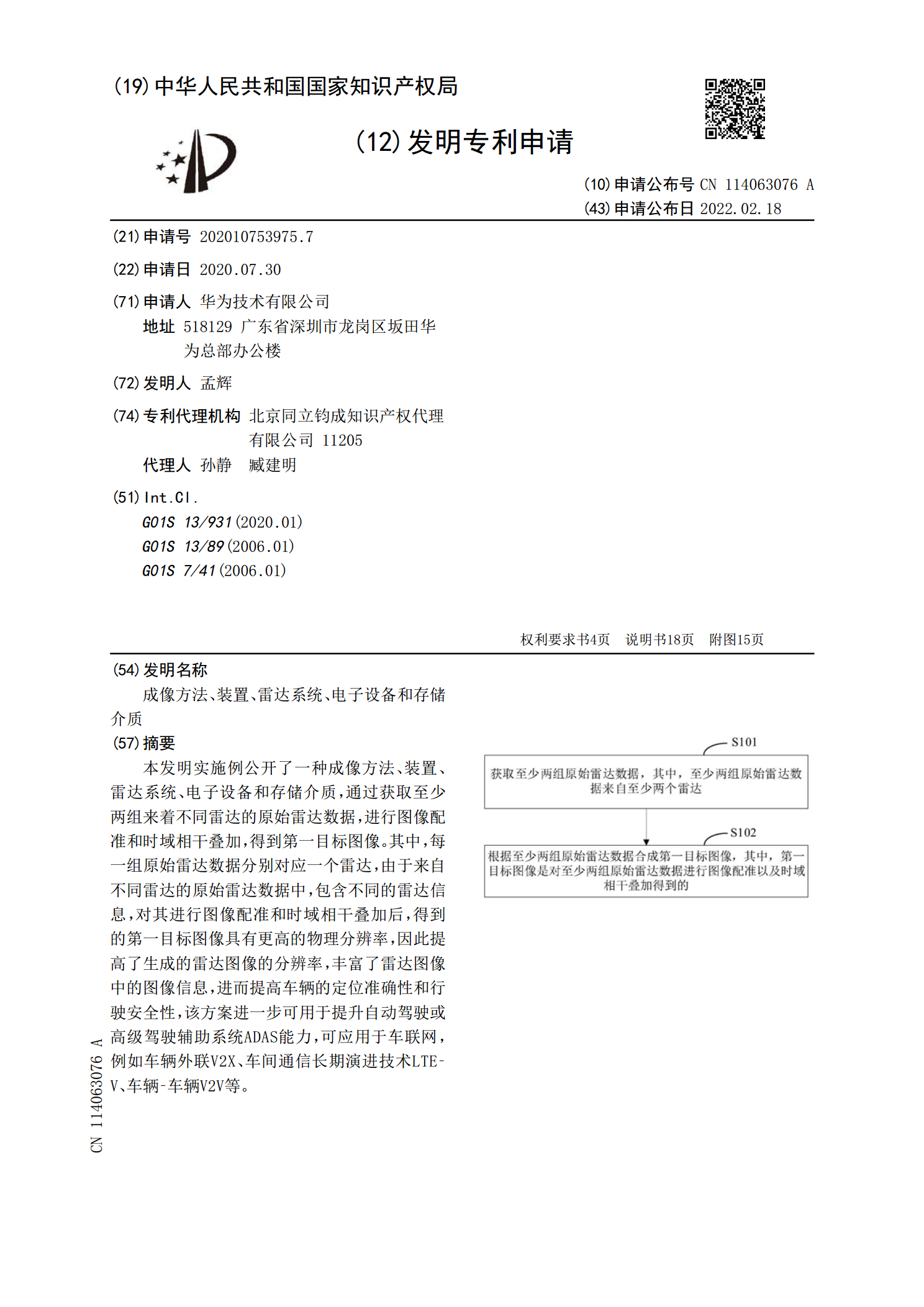
本发明实施例公开了一种成像方法、装置、雷达系统、电子设备和存储介质,通过获取至少两组来着不同雷达的原始雷达数据,进行图像配准和时域相干叠加,得到第一目标图像。其中,每一组原始雷达数据分别对应一个雷达,由于来自不同雷达的原始雷达数据中,包含不同的雷达信息,对其进行图像配准和时域相干叠加后,得到的第一目标图像具有更高的物理分辨率,因此提高了生成的雷达图像的分辨率,丰富了雷达图像中的图像信息,进而提高车辆的定位准确性和行驶安全性,该方案进一步可用于提升自动驾驶或高级驾驶辅助系统ADAS能力,可应用于车联网,例如