
车辆的控制方法、系统、装置以及车辆.pdf

Do****76

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

车辆控制方法、装置、系统、以及车辆.pdf
本发明实施例提供一种车辆控制方法、装置、系统、以及车辆,属于自动控制技术领域。所述方法包括:获取身份信息;以及根据所述身份信息以及车辆已验证身份信息,控制所述车辆。本发明实施例将对驾驶员的身份验证加入到对车辆的控制中,实现更为安全的车辆控制,保证车辆所有者的财产和人身安全。
车辆控制装置、车辆控制方法、以及车辆控制系统.pdf
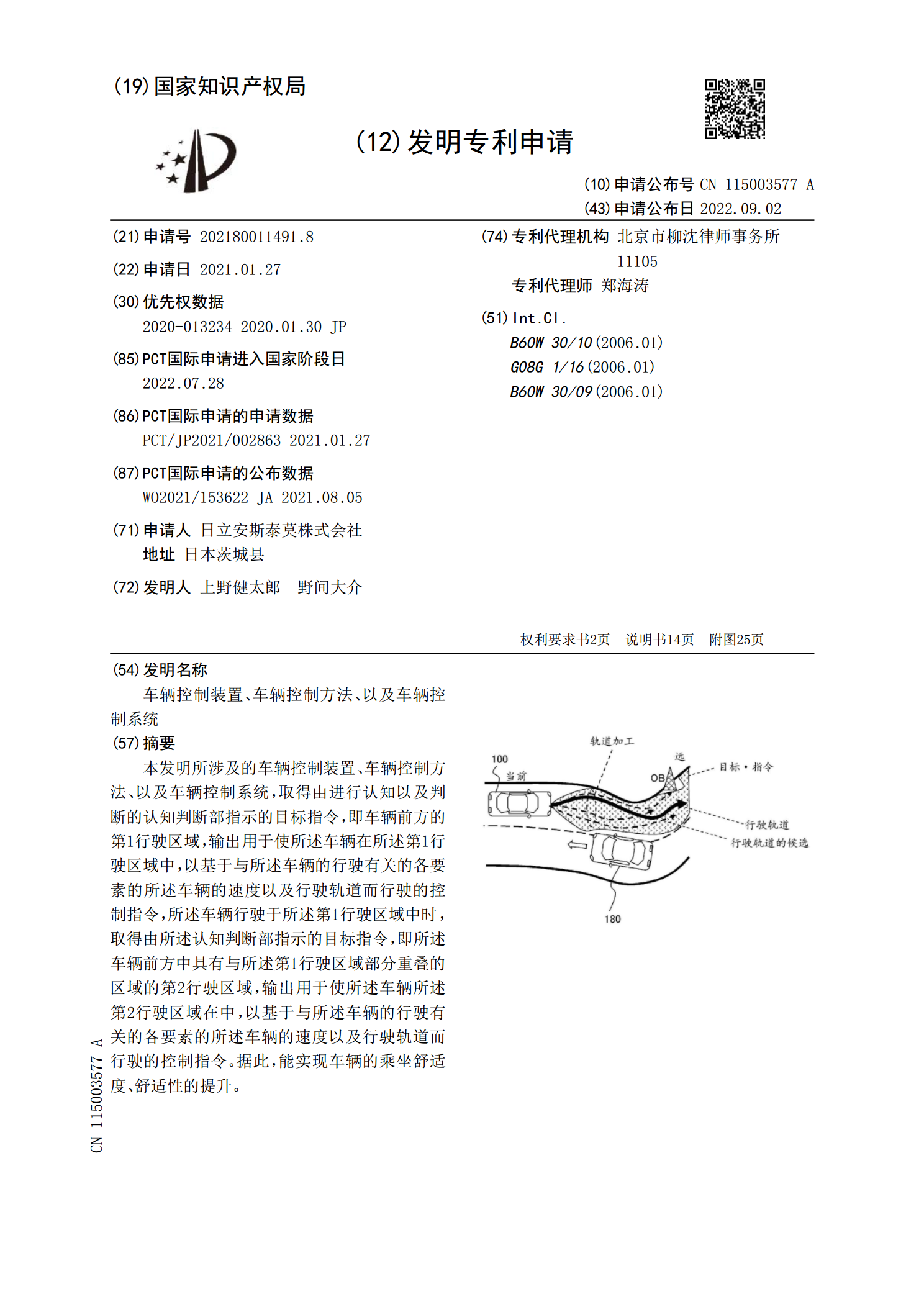
本发明所涉及的车辆控制装置、车辆控制方法、以及车辆控制系统,取得由进行认知以及判断的认知判断部指示的目标指令,即车辆前方的第1行驶区域,输出用于使所述车辆在所述第1行驶区域中,以基于与所述车辆的行驶有关的各要素的所述车辆的速度以及行驶轨道而行驶的控制指令,所述车辆行驶于所述第1行驶区域中时,取得由所述认知判断部指示的目标指令,即所述车辆前方中具有与所述第1行驶区域部分重叠的区域的第2行驶区域,输出用于使所述车辆所述第2行驶区域在中,以基于与所述车辆的行驶有关的各要素的所述车辆的速度以及行驶轨道而行驶的控制

车辆控制装置、车辆控制方法以及车辆控制系统.pdf
提供一种车辆控制装置,其能够直观且容易地理解车辆的乘员的开关操作,能够直接传递乘员的意图而抑制不协调感。车辆控制装置具备控制部,该控制部进行用于基于被输入的信息变更车辆的目标车速和与在车辆的前方行驶的前行车的目标车间距中的至少一方的运算。该控制部根据被输入的与对前行车的跟随相关的信息和与车辆的乘员对调整部的操作的方式相关的信息来变更目标车速和目标车间距中的至少一方,并输出用于控制对车辆进行制动驱动的制动驱动装置的控制指令,以成为变更后的目标车速或目标车间距。
车辆控制装置、车辆控制方法以及车辆控制系统.pdf
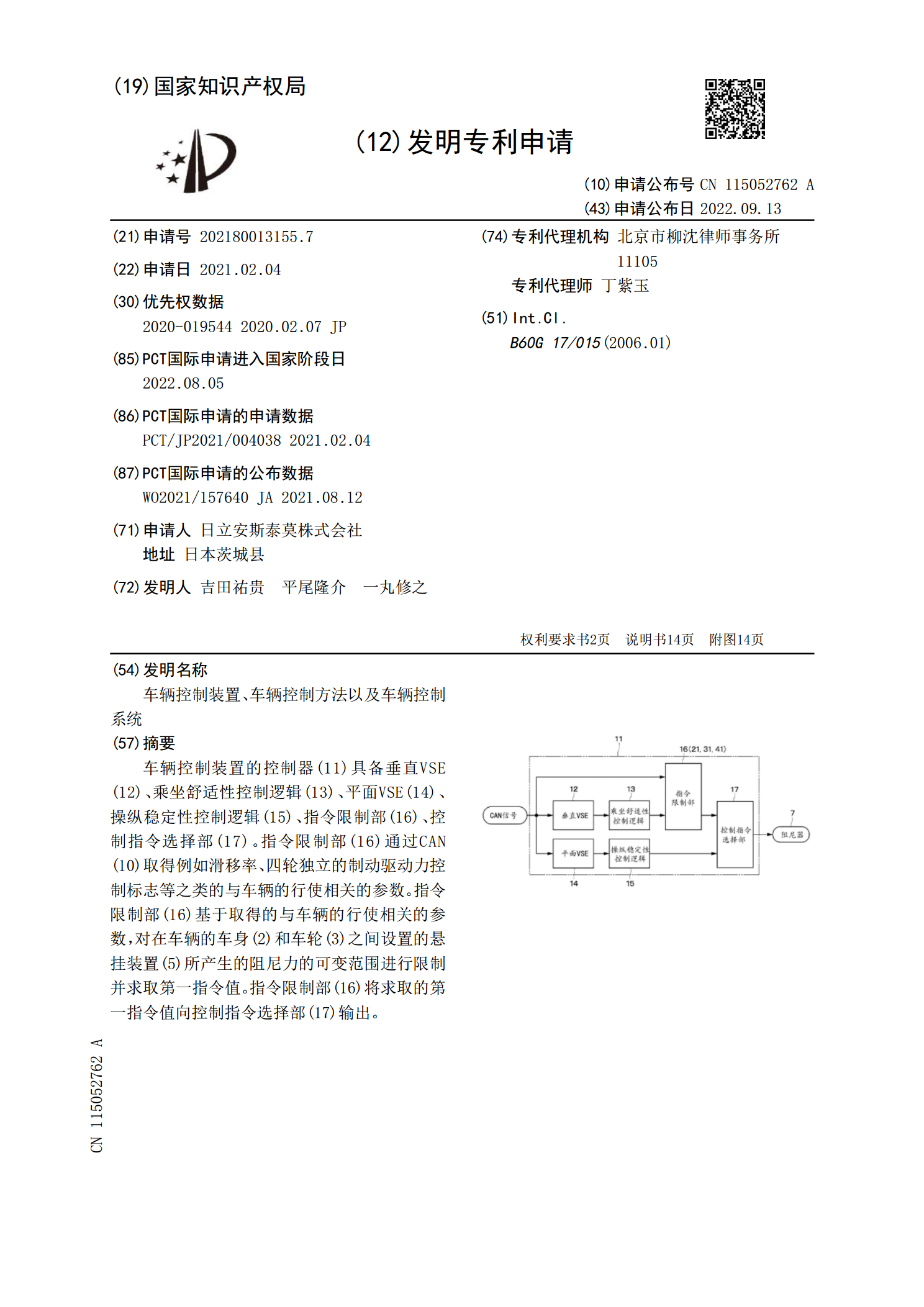
车辆控制装置的控制器(11)具备垂直VSE(12)、乘坐舒适性控制逻辑(13)、平面VSE(14)、操纵稳定性控制逻辑(15)、指令限制部(16)、控制指令选择部(17)。指令限制部(16)通过CAN(10)取得例如滑移率、四轮独立的制动驱动力控制标志等之类的与车辆的行使相关的参数。指令限制部(16)基于取得的与车辆的行使相关的参数,对在车辆的车身(2)和车轮(3)之间设置的悬挂装置(5)所产生的阻尼力的可变范围进行限制并求取第一指令值。指令限制部(16)将求取的第一指令值向控制指令选择部(17)输出。

车辆的控制方法、系统、装置以及车辆.pdf
本发明公开了一种车辆的控制方法、系统、装置以及车辆,包括:采集车辆在至少一个第一监测区域内的监测信息;基于各第一监测区域内的监测信息,确定任意一个第一监测区域内是否存在障碍物;当第一监测区域存在障碍物时,则输出盲区监测指令,盲区监测指令用于指示对车辆外部的第二监测区域进行监测,第一监测区域和第二监测区域之间至少存在部分不同区域;基于盲区监测指令,监测第二监测区域内是否存在障碍物;当第二监测区域内识别到障碍物,且障碍物的运动趋势为朝向车辆移动时,则输出提示信息和/或控制指令集,控制指令集至少包括用于指示车辆