
实时检测真空度的红外探测器微型杜瓦.pdf

书錦****by


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
实时检测真空度的红外探测器微型杜瓦.pdf
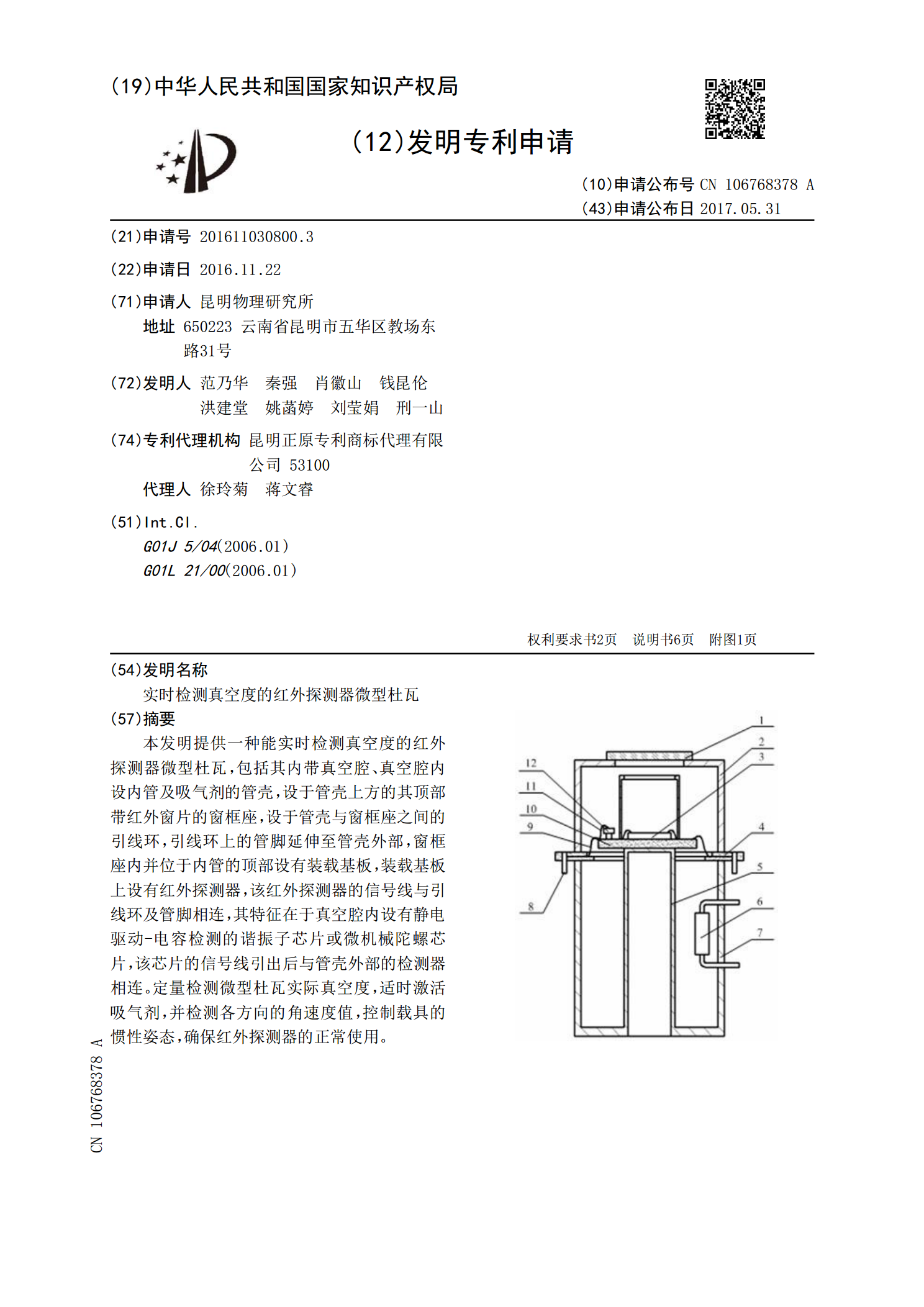
本发明提供一种能实时检测真空度的红外探测器微型杜瓦,包括其内带真空腔、真空腔内设内管及吸气剂的管壳,设于管壳上方的其顶部带红外窗片的窗框座,设于管壳与窗框座之间的引线环,引线环上的管脚延伸至管壳外部,窗框座内并位于内管的顶部设有装载基板,装载基板上设有红外探测器,该红外探测器的信号线与引线环及管脚相连,其特征在于真空腔内设有静电驱动‑电容检测的谐振子芯片或微机械陀螺芯片,该芯片的信号线引出后与管壳外部的检测器相连。定量检测微型杜瓦实际真空度,适时激活吸气剂,并检测各方向的角速度值,控制载具的惯性姿态,确保
一种红外探测器微型杜瓦.pdf
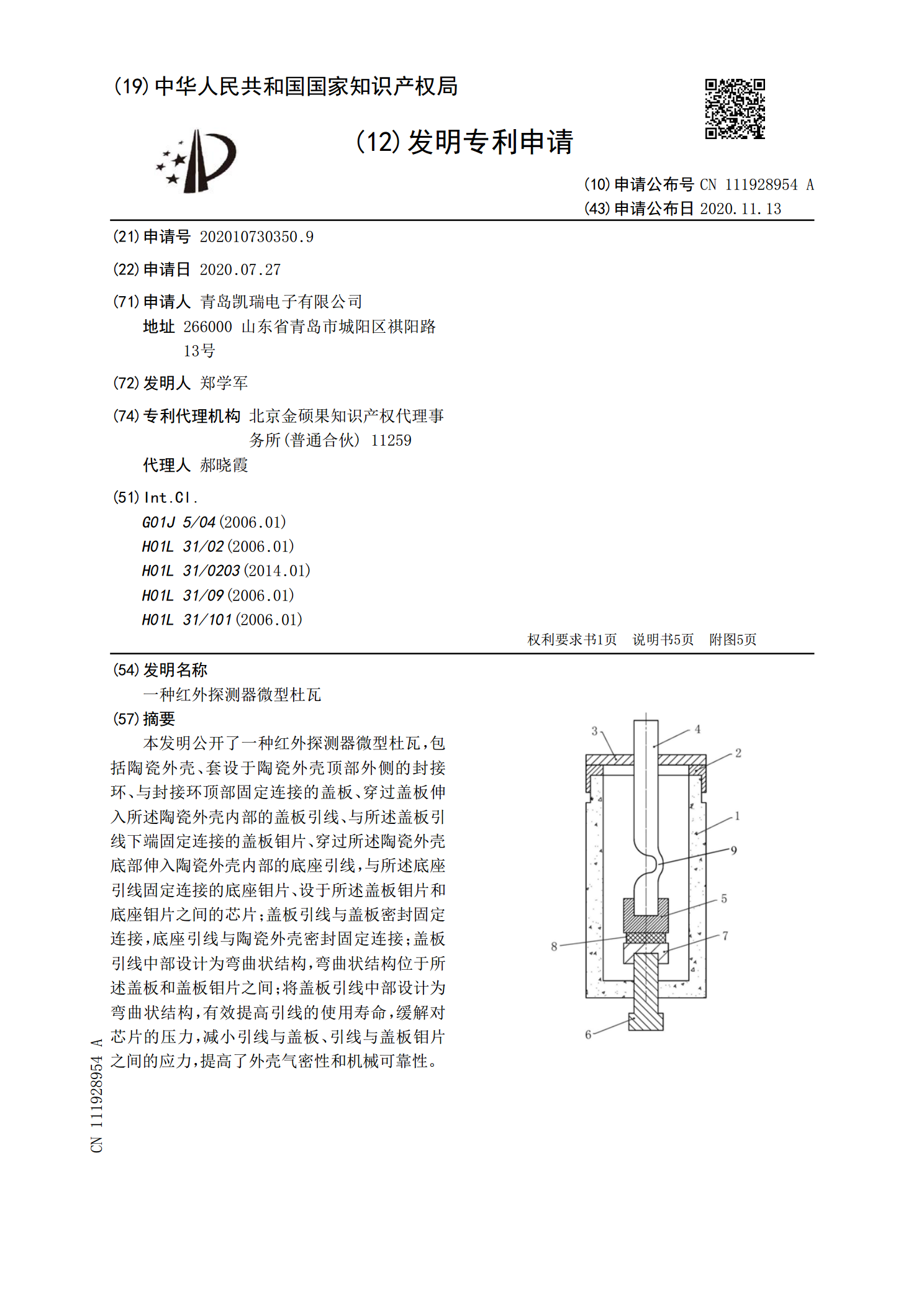
本发明公开了一种红外探测器微型杜瓦,包括陶瓷外壳、套设于陶瓷外壳顶部外侧的封接环、与封接环顶部固定连接的盖板、穿过盖板伸入所述陶瓷外壳内部的盖板引线、与所述盖板引线下端固定连接的盖板钼片、穿过所述陶瓷外壳底部伸入陶瓷外壳内部的底座引线,与所述底座引线固定连接的底座钼片、设于所述盖板钼片和底座钼片之间的芯片;盖板引线与盖板密封固定连接,底座引线与陶瓷外壳密封固定连接;盖板引线中部设计为弯曲状结构,弯曲状结构位于所述盖板和盖板钼片之间;将盖板引线中部设计为弯曲状结构,有效提高引线的使用寿命,缓解对芯片的压力,
杜瓦及红外探测器.pdf
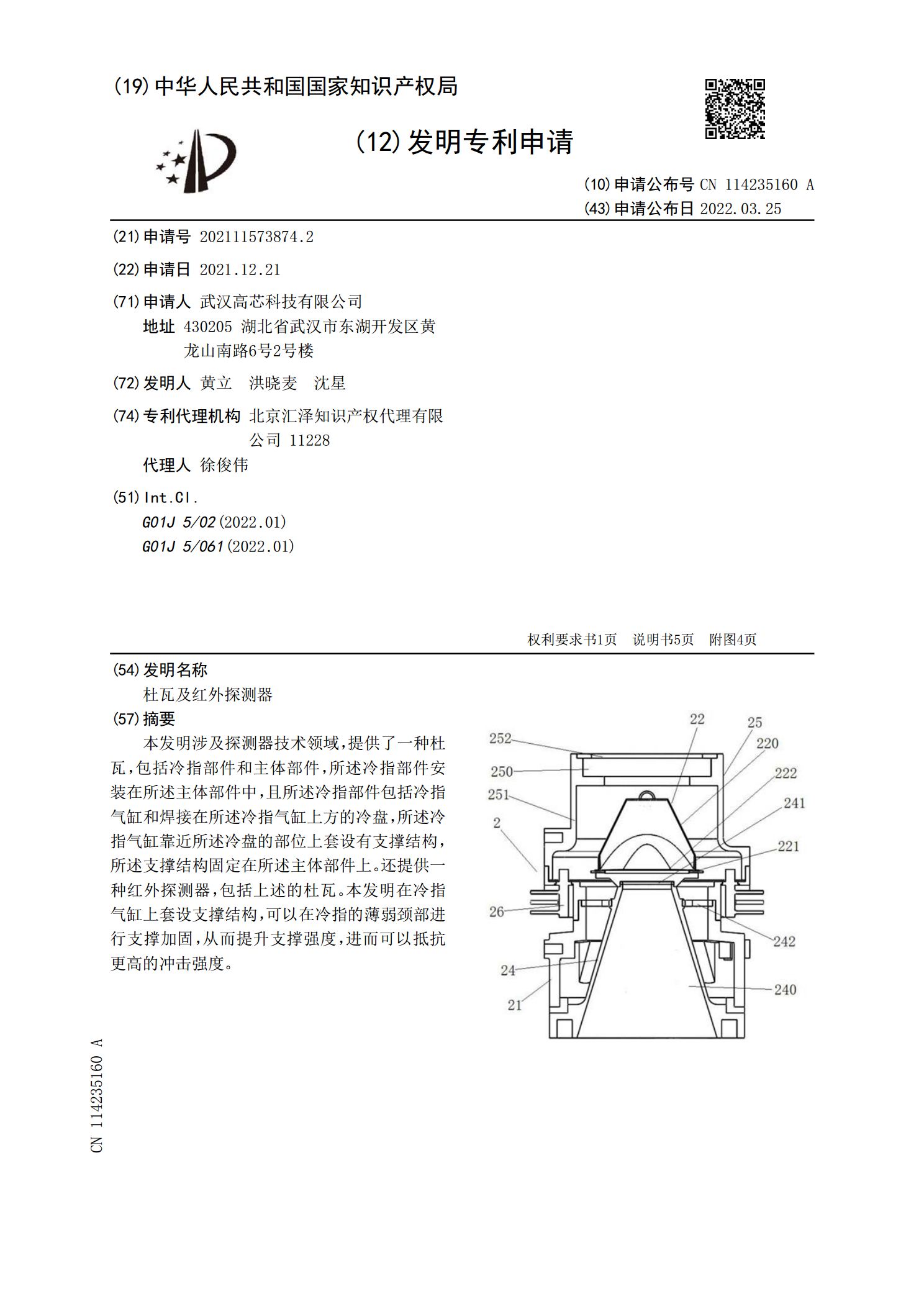
本发明涉及探测器技术领域,提供了一种杜瓦,包括冷指部件和主体部件,所述冷指部件安装在所述主体部件中,且所述冷指部件包括冷指气缸和焊接在所述冷指气缸上方的冷盘,所述冷指气缸靠近所述冷盘的部位上套设有支撑结构,所述支撑结构固定在所述主体部件上。还提供一种红外探测器,包括上述的杜瓦。本发明在冷指气缸上套设支撑结构,可以在冷指的薄弱颈部进行支撑加固,从而提升支撑强度,进而可以抵抗更高的冲击强度。
杜瓦组件及红外探测器.pdf
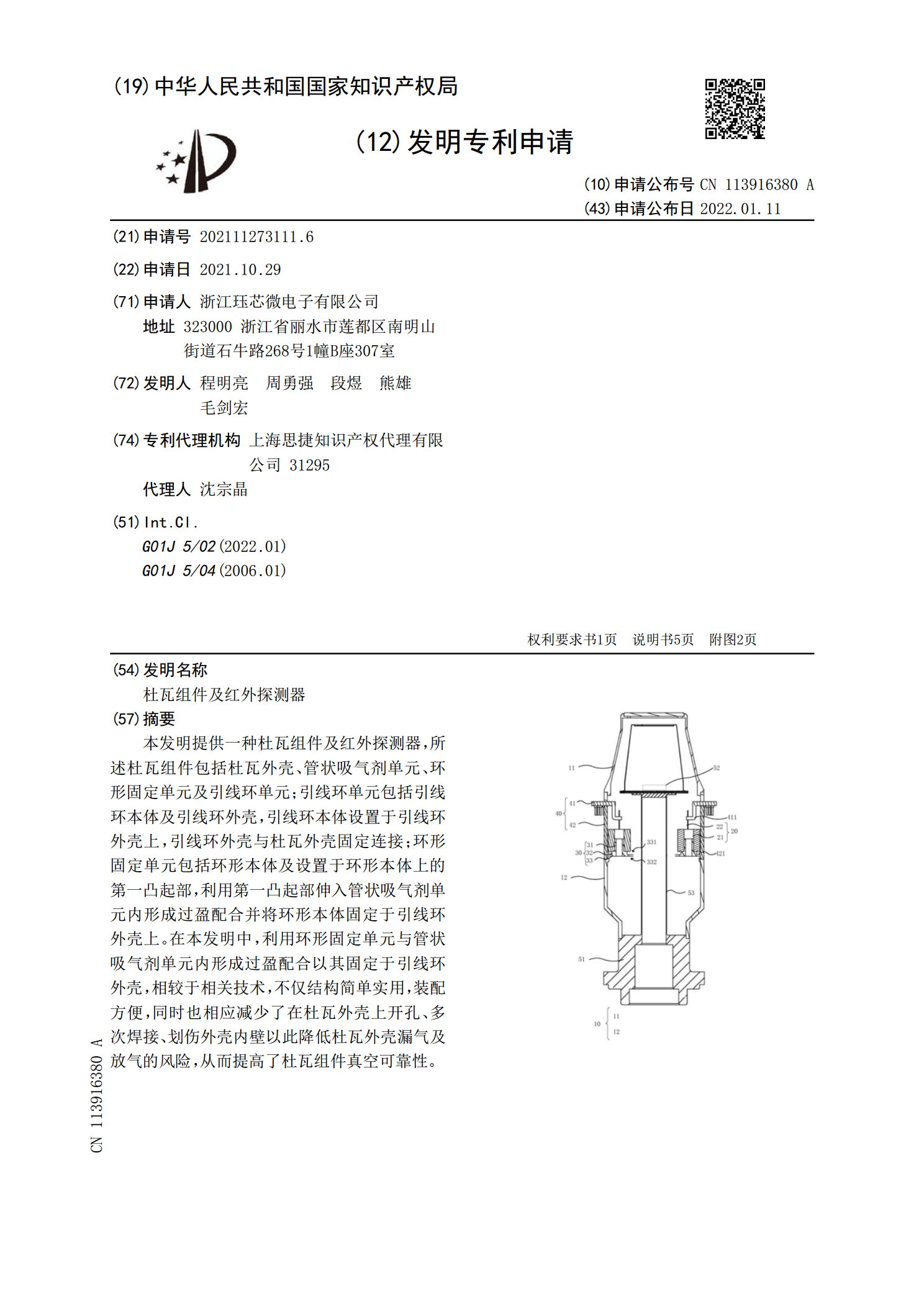
本发明提供一种杜瓦组件及红外探测器,所述杜瓦组件包括杜瓦外壳、管状吸气剂单元、环形固定单元及引线环单元;引线环单元包括引线环本体及引线环外壳,引线环本体设置于引线环外壳上,引线环外壳与杜瓦外壳固定连接;环形固定单元包括环形本体及设置于环形本体上的第一凸起部,利用第一凸起部伸入管状吸气剂单元内形成过盈配合并将环形本体固定于引线环外壳上。在本发明中,利用环形固定单元与管状吸气剂单元内形成过盈配合以其固定于引线环外壳,相较于相关技术,不仅结构简单实用,装配方便,同时也相应减少了在杜瓦外壳上开孔、多次焊接、划伤外
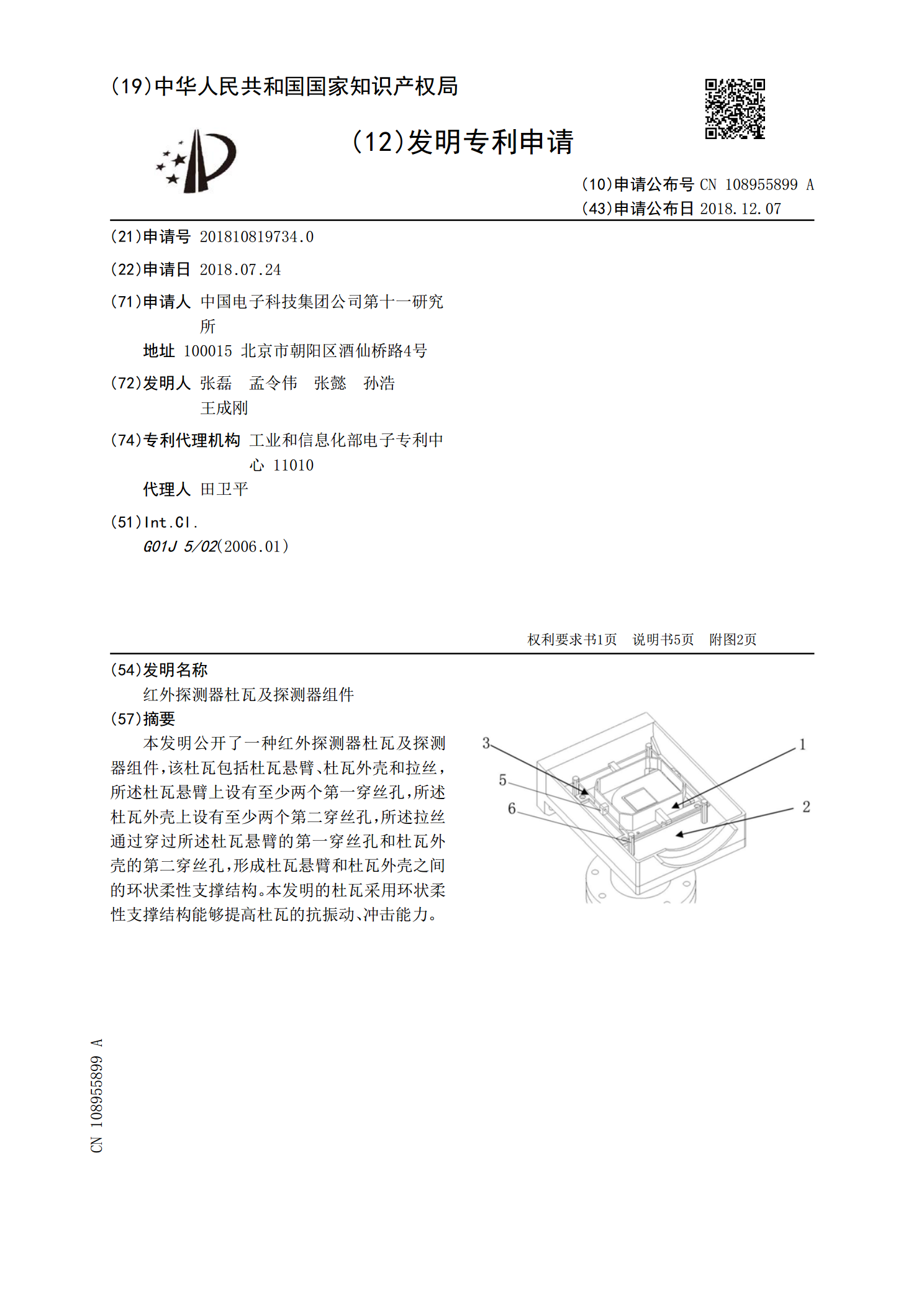
红外探测器杜瓦及探测器组件.pdf
本发明公开了一种红外探测器杜瓦及探测器组件,该杜瓦包括杜瓦悬臂、杜瓦外壳和拉丝,所述杜瓦悬臂上设有至少两个第一穿丝孔,所述杜瓦外壳上设有至少两个第二穿丝孔,所述拉丝通过穿过所述杜瓦悬臂的第一穿丝孔和杜瓦外壳的第二穿丝孔,形成杜瓦悬臂和杜瓦外壳之间的环状柔性支撑结构。本发明的杜瓦采用环状柔性支撑结构能够提高杜瓦的抗振动、冲击能力。