
仪表盘非线性刻度视觉检测方法及画写系统装置.pdf

俊英****22

1/10

2/10

3/10

4/10
5/10
6/10

7/10

8/10

9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
仪表盘非线性刻度视觉检测方法及画写系统装置.pdf
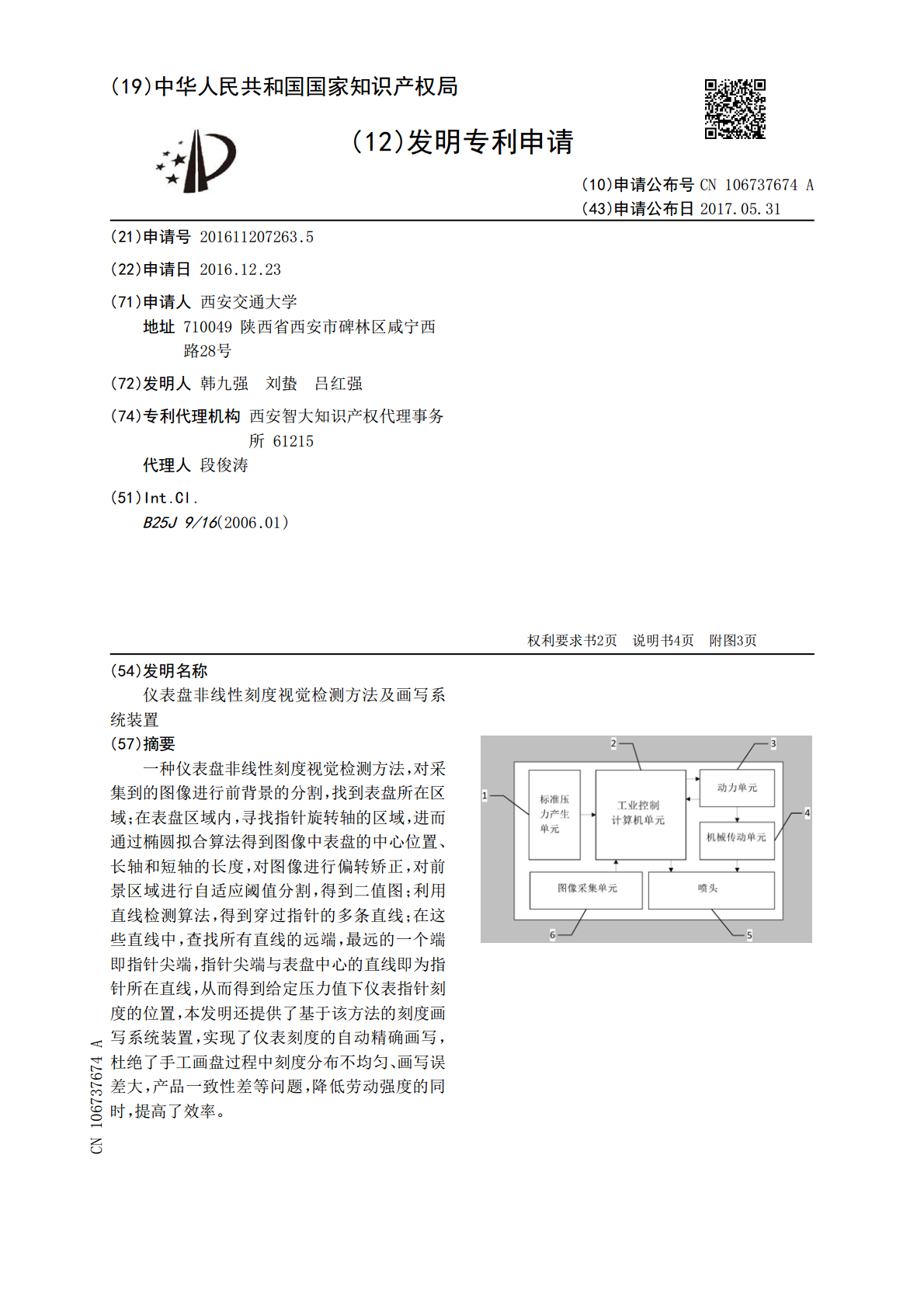
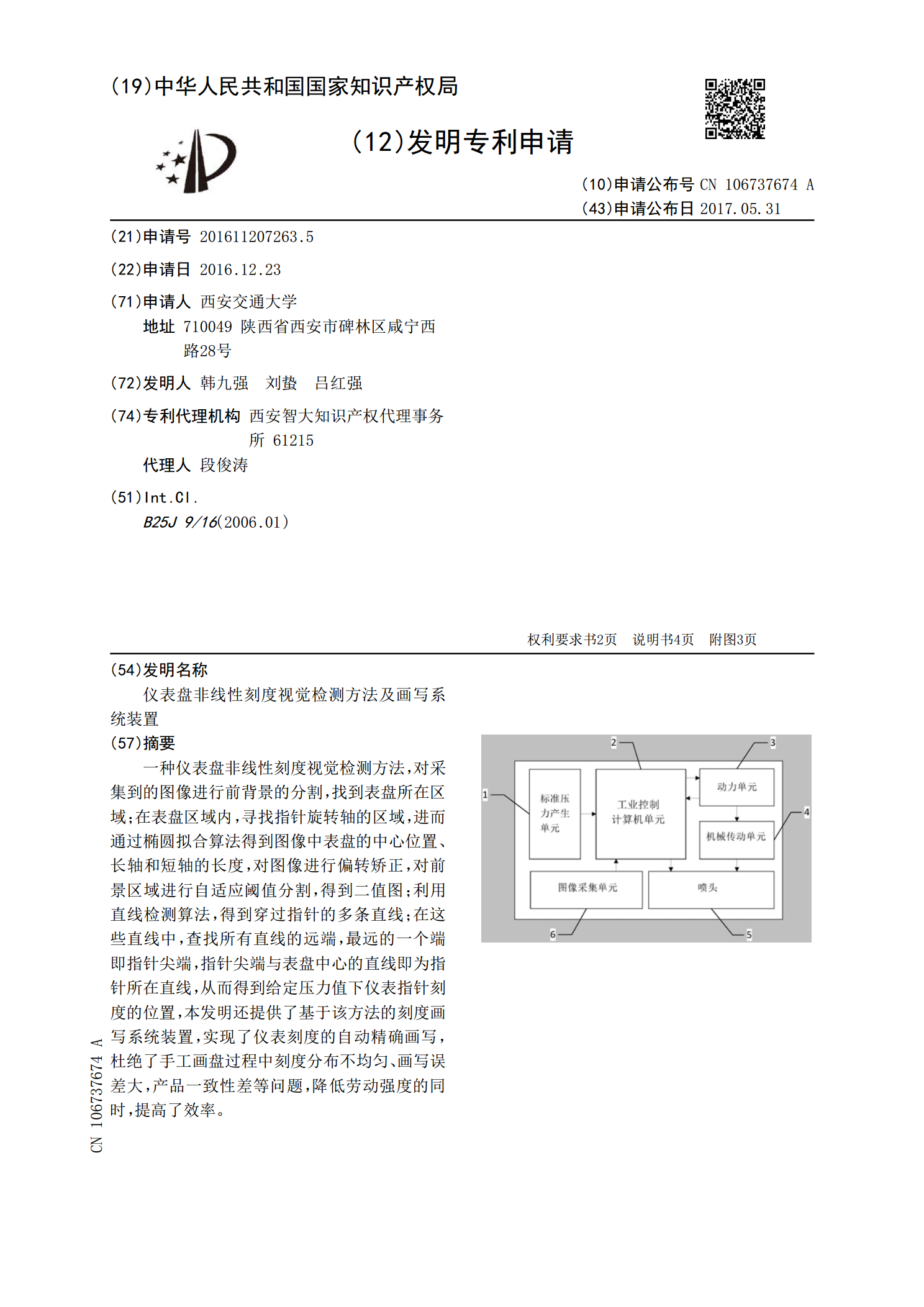
一种仪表盘非线性刻度视觉检测方法,对采集到的图像进行前背景的分割,找到表盘所在区域;在表盘区域内,寻找指针旋转轴的区域,进而通过椭圆拟合算法得到图像中表盘的中心位置、长轴和短轴的长度,对图像进行偏转矫正,对前景区域进行自适应阈值分割,得到二值图;利用直线检测算法,得到穿过指针的多条直线;在这些直线中,查找所有直线的远端,最远的一个端即指针尖端,指针尖端与表盘中心的直线即为指针所在直线,从而得到给定压力值下仪表指针刻度的位置,本发明还提供了基于该方法的刻度画写系统装置,实现了仪表刻度的自动精确画写,杜绝了手
一种基于机器视觉的汽车仪表盘性能检测装置.pdf
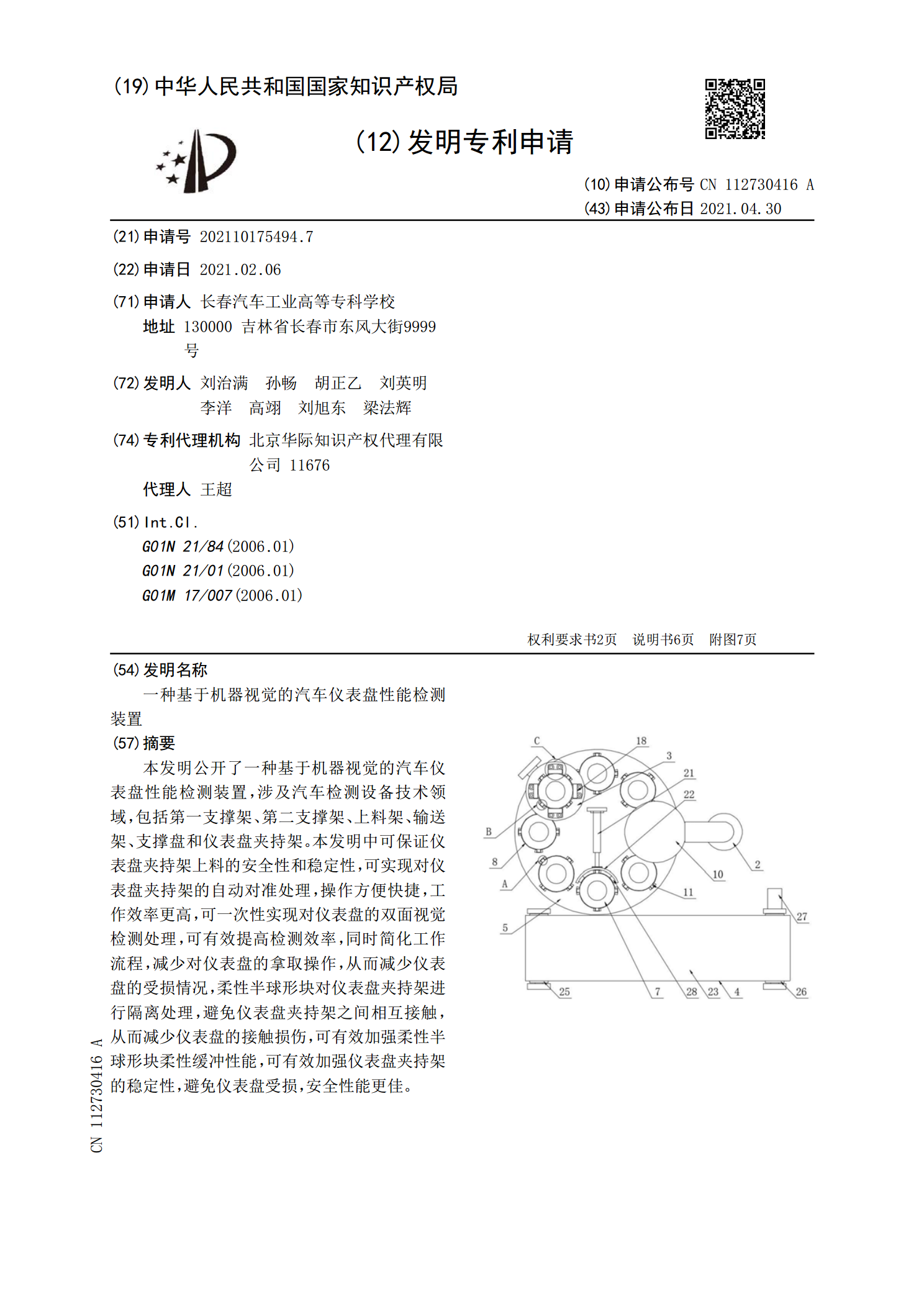
本发明公开了一种基于机器视觉的汽车仪表盘性能检测装置,涉及汽车检测设备技术领域,包括第一支撑架、第二支撑架、上料架、输送架、支撑盘和仪表盘夹持架。本发明中可保证仪表盘夹持架上料的安全性和稳定性,可实现对仪表盘夹持架的自动对准处理,操作方便快捷,工作效率更高,可一次性实现对仪表盘的双面视觉检测处理,可有效提高检测效率,同时简化工作流程,减少对仪表盘的拿取操作,从而减少仪表盘的受损情况,柔性半球形块对仪表盘夹持架进行隔离处理,避免仪表盘夹持架之间相互接触,从而减少仪表盘的接触损伤,可有效加强柔性半球形块柔性缓

一种基于机器视觉的汽车仪表盘性能检测系统.pdf
本发明属于汽车性能领域,具体公开了一种基于机器视觉的汽车仪表盘性能检测系统,包括固定检测台、控制模块、传输模块、云端平台、待检测仪表盘、第一相机模块、第二相机模块;所述固定检测台包括台座、支撑杆和检测板;所述台座底面四角位置处竖直固定有支撑杆,所述台座表面设置有检测板,所述检测板中心开设有放置槽,放置槽内固定有待检测仪表盘,所述放置槽一侧开设有两接线槽,接线槽内设置有电源线,所述电源线一端与待检测仪表盘连接,另一端与供电模块连接;所述固定检测台表面位于待检测仪表盘两侧设置有若干调节件,所述第一相机模块和第

视觉盲区检测方法及装置.pdf
本公开提供一种视觉盲区检测方法及装置,当检测到障碍物时,获取障碍物的位置信息和自动驾驶交通工具上的传感器的位置信息,基于障碍物的位置信息、传感器的位置信息以及电子地图中的道路区域,确定自动驾驶交通工具的一个视觉盲区,从而实现自动驾驶交通工具自动检测出视觉盲区范围;这样,自动驾驶交通工具可以在进入视觉盲区之前提前采取一定措施,即使发生有行人或车辆突然从视觉盲区出现,自动驾驶交通工具也能够及时处理,以降低视觉盲区中的车辆和/或行人带来的安全风险,提高自动驾驶的安全性。本公开还提供一种电子设备和计算机可读介质。
车辆视觉补偿的方法、装置及系统.pdf
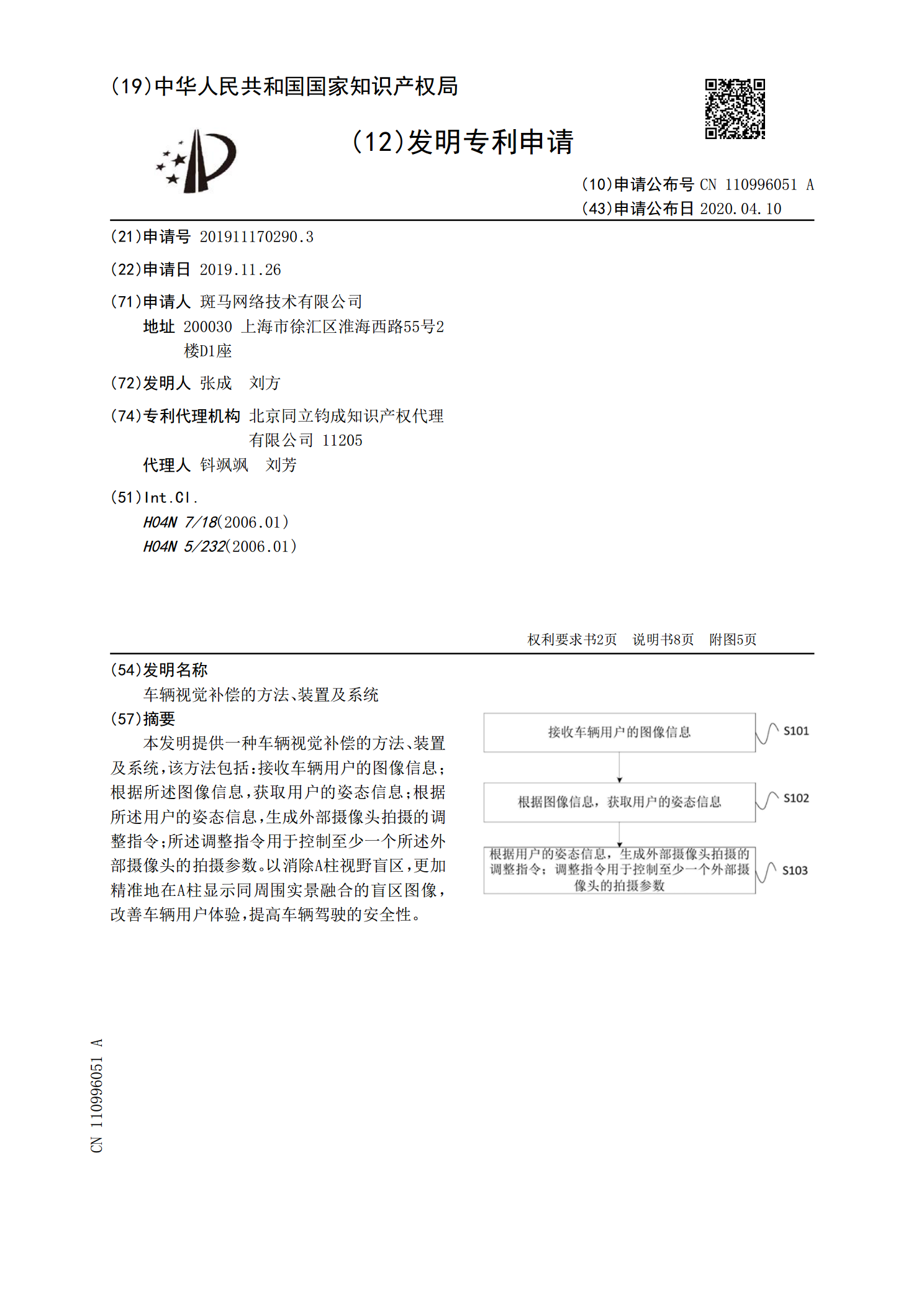
本发明提供一种车辆视觉补偿的方法、装置及系统,该方法包括:接收车辆用户的图像信息;根据所述图像信息,获取用户的姿态信息;根据所述用户的姿态信息,生成外部摄像头拍摄的调整指令;所述调整指令用于控制至少一个所述外部摄像头的拍摄参数。以消除A柱视野盲区,更加精准地在A柱显示同周围实景融合的盲区图像,改善车辆用户体验,提高车辆驾驶的安全性。