
视觉盲区检测方法及装置.pdf

冬易****娘子

1/10
2/10

3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

视觉盲区检测方法及装置.pdf
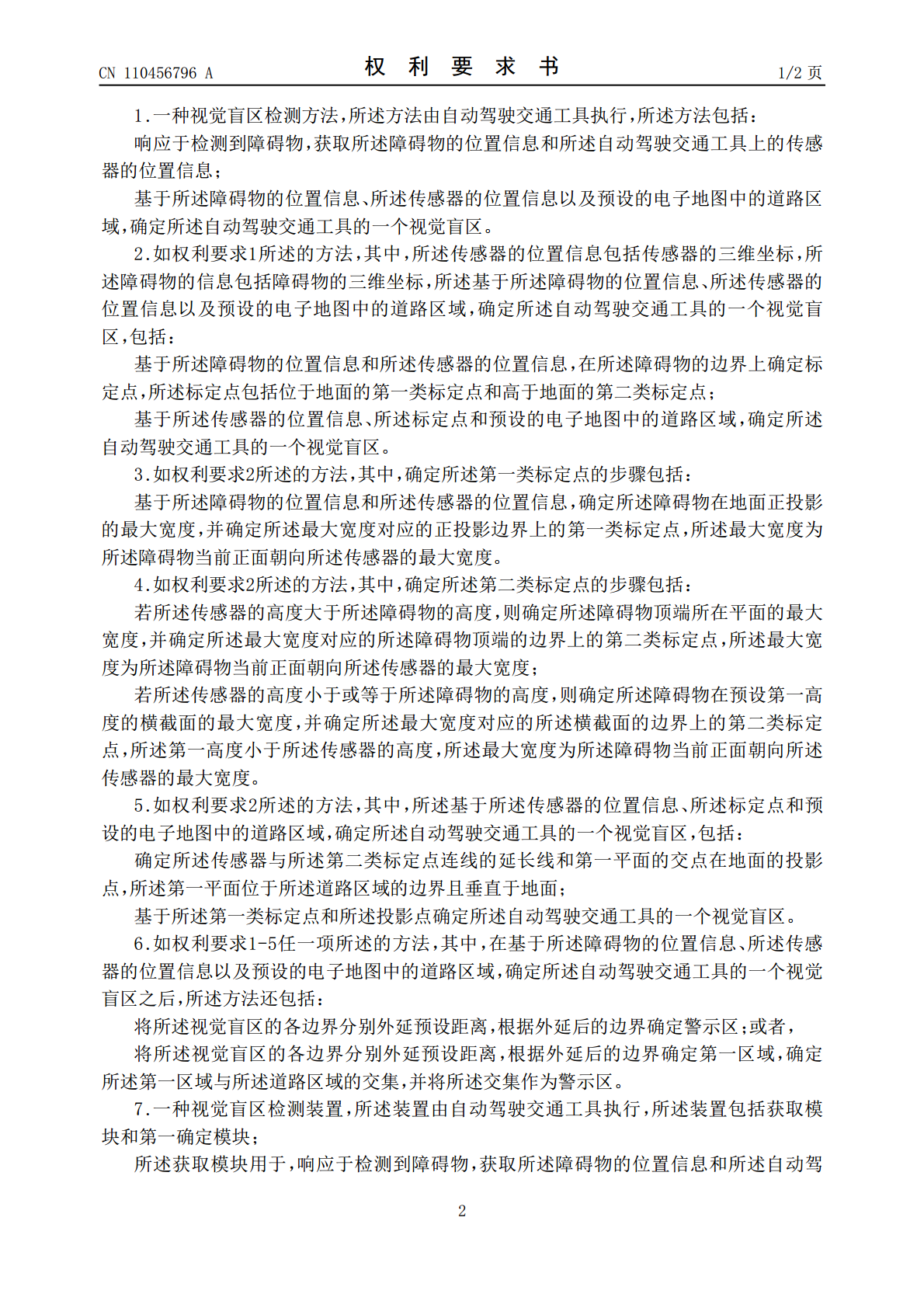
本公开提供一种视觉盲区检测方法及装置,当检测到障碍物时,获取障碍物的位置信息和自动驾驶交通工具上的传感器的位置信息,基于障碍物的位置信息、传感器的位置信息以及电子地图中的道路区域,确定自动驾驶交通工具的一个视觉盲区,从而实现自动驾驶交通工具自动检测出视觉盲区范围;这样,自动驾驶交通工具可以在进入视觉盲区之前提前采取一定措施,即使发生有行人或车辆突然从视觉盲区出现,自动驾驶交通工具也能够及时处理,以降低视觉盲区中的车辆和/或行人带来的安全风险,提高自动驾驶的安全性。本公开还提供一种电子设备和计算机可读介质。

视觉盲区摄像装置安装方法.pdf
本发明涉及一种视觉盲区摄像装置安装方法,根据安装外壳中的刻度表盘与摄像装置中的参考标线,转动嵌入式设置在安装外壳内的摄像装置,将摄像装置的镜头视角预先锁定在一个设置在较小的区间内,从而减少摄像装置的镜头视角最终校准所需的时间,并将摄像装置的镜头视角初步锁定后拍摄到的画面,通过外部的显示屏显示,根据外部显示器内的显示画面校准摄像装置的镜头视角,同时记录校准后的数据,进而根据记录的安装外壳上的刻度盘与参考标线记录摄像装置初次安装角度,对剩余车辆的摄像装置进行统一安装,在保证制造成本不变的同时,大大缩减了批量安

一种视觉盲区检测装置.pdf
本发明提出了一种视觉盲区检测装置,包括:设置在车辆后侧保险杠两端和两侧车门中柱上的超声波测距模块,输出测距信号;运算放大器,对所述测距信号进行功率放大;A/D转换器,将所述测距信号由模拟信号转换为数字信号;控制器,其输入端接收所述数字形式的测距信号,在液晶屏上模拟盲区车辆的行进轨迹,当测距小于警戒值时,发出报警音。
视觉盲区教学观看方法、系统、拍摄装置.pdf
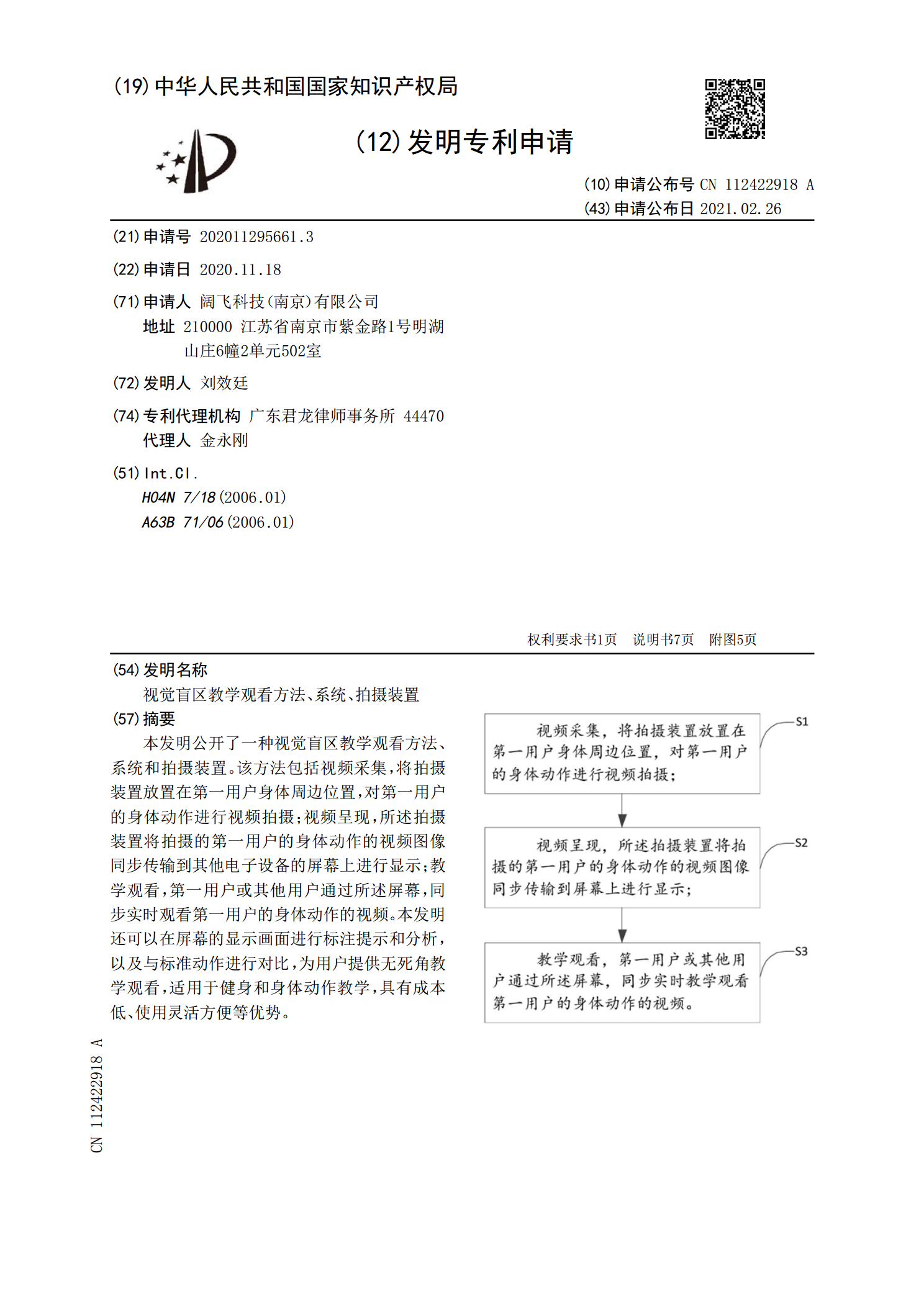
本发明公开了一种视觉盲区教学观看方法、系统和拍摄装置。该方法包括视频采集,将拍摄装置放置在第一用户身体周边位置,对第一用户的身体动作进行视频拍摄;视频呈现,所述拍摄装置将拍摄的第一用户的身体动作的视频图像同步传输到其他电子设备的屏幕上进行显示;教学观看,第一用户或其他用户通过所述屏幕,同步实时观看第一用户的身体动作的视频。本发明还可以在屏幕的显示画面进行标注提示和分析,以及与标准动作进行对比,为用户提供无死角教学观看,适用于健身和身体动作教学,具有成本低、使用灵活方便等优势。
一种视觉盲区检测方法.pdf
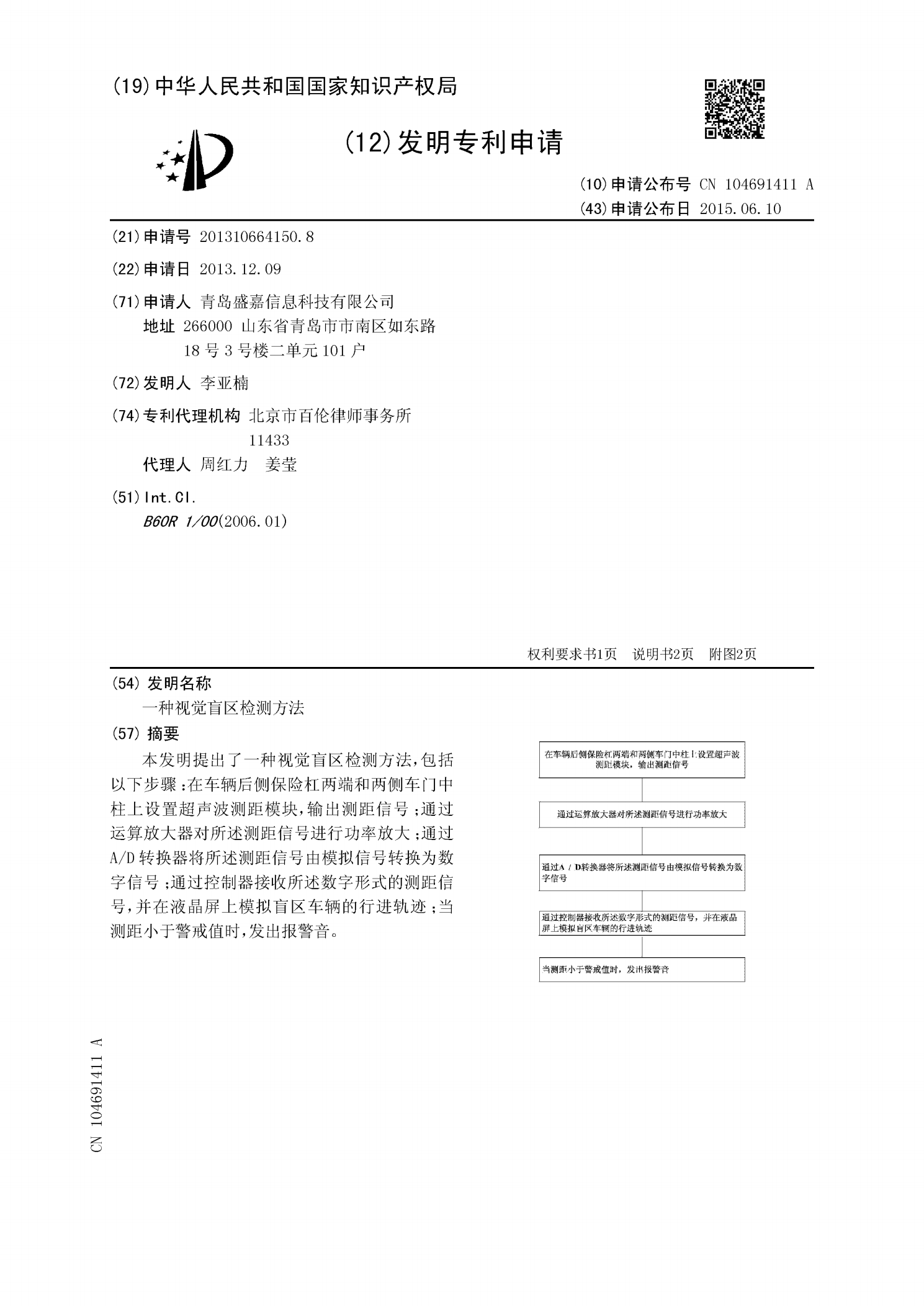
本发明提出了一种视觉盲区检测方法,包括以下步骤:在车辆后侧保险杠两端和两侧车门中柱上设置超声波测距模块,输出测距信号;通过运算放大器对所述测距信号进行功率放大;通过A/D转换器将所述测距信号由模拟信号转换为数字信号;通过控制器接收所述数字形式的测距信号,并在液晶屏上模拟盲区车辆的行进轨迹;当测距小于警戒值时,发出报警音。