
一种应用于多工位冲压模具的模内机械手装置.pdf

子安****吖吖

1/6

2/6
3/6
4/6

5/6

6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种应用于多工位冲压模具的模内机械手装置.pdf
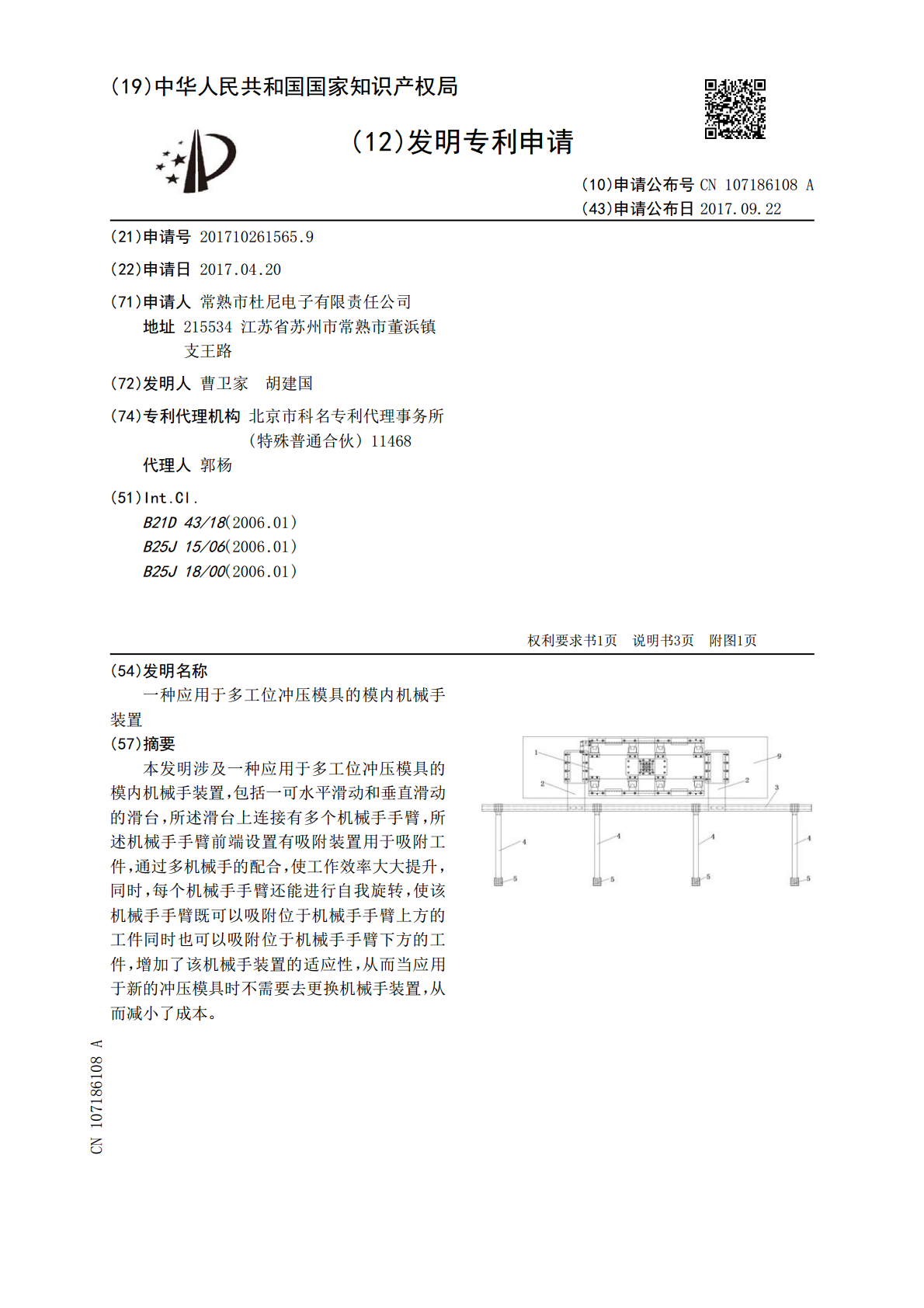
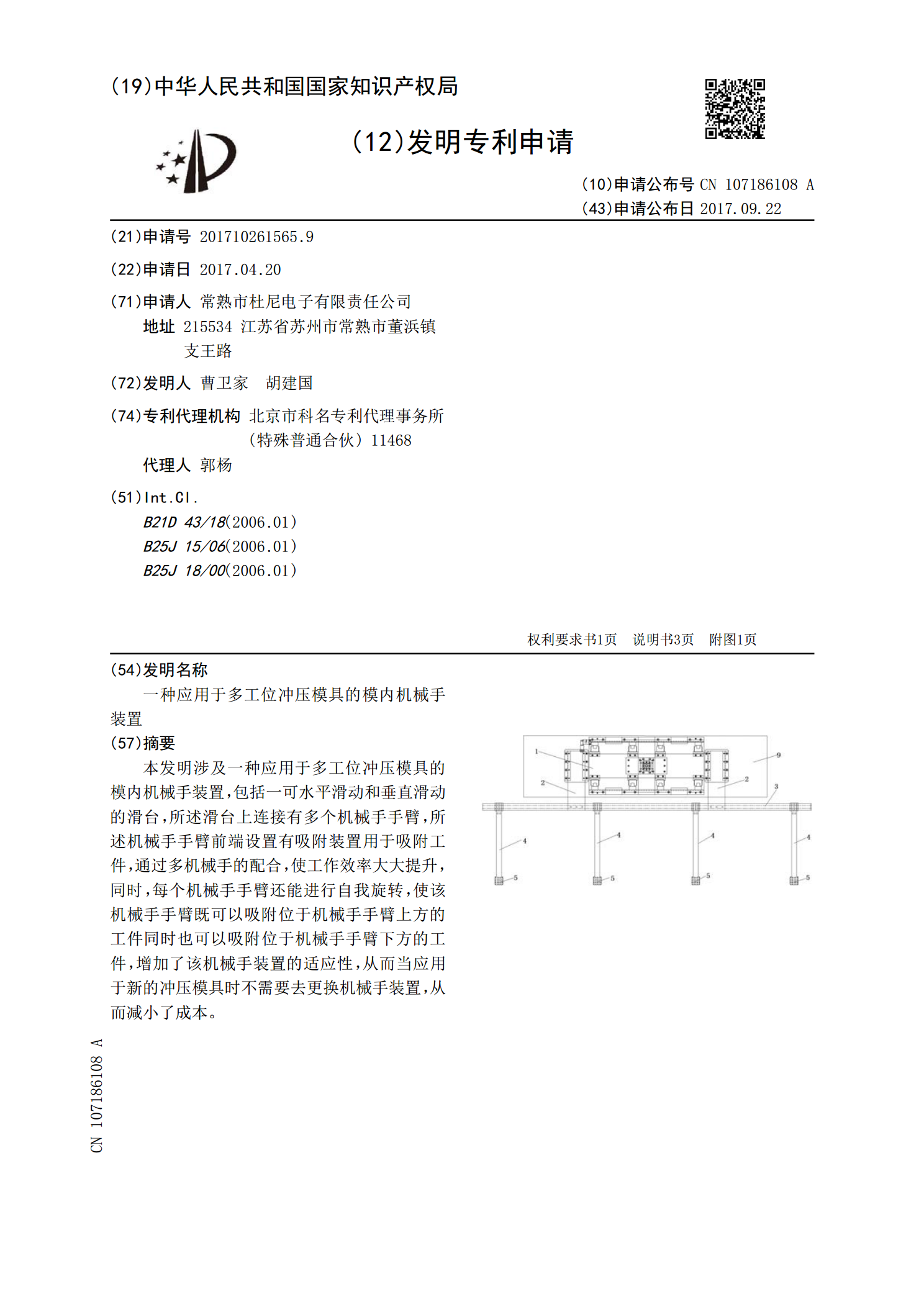
本发明涉及一种应用于多工位冲压模具的模内机械手装置,包括一可水平滑动和垂直滑动的滑台,所述滑台上连接有多个机械手手臂,所述机械手手臂前端设置有吸附装置用于吸附工件,通过多机械手的配合,使工作效率大大提升,同时,每个机械手手臂还能进行自我旋转,使该机械手手臂既可以吸附位于机械手手臂上方的工件同时也可以吸附位于机械手手臂下方的工件,增加了该机械手装置的适应性,从而当应用于新的冲压模具时不需要去更换机械手装置,从而减小了成本。
多工位级进模设计(冲压与模具).pptx
本章内容:多工位精密级进模多工位级进模是在普通级进模的基础上发展起来的一种高精度、高效率、高寿命的模具是技术密集型模具的重要代表是冲模发展方向之一。1.按冲压工序性质分类(1)冲裁多工位级进模(2)成形工序多工位级进模2.按冲压件成形方法分类(1)封闭形孔级进模(2)切除余料级进模(1)封闭形孔多工位冲压(2)切除余料多工位冲压(2)切除余料多工位冲压带料连续拉深带料连续拉深实例多工位级进模设计与普通冲模有很大的不同要求也要高的多。工艺设计时必须得到试制或小
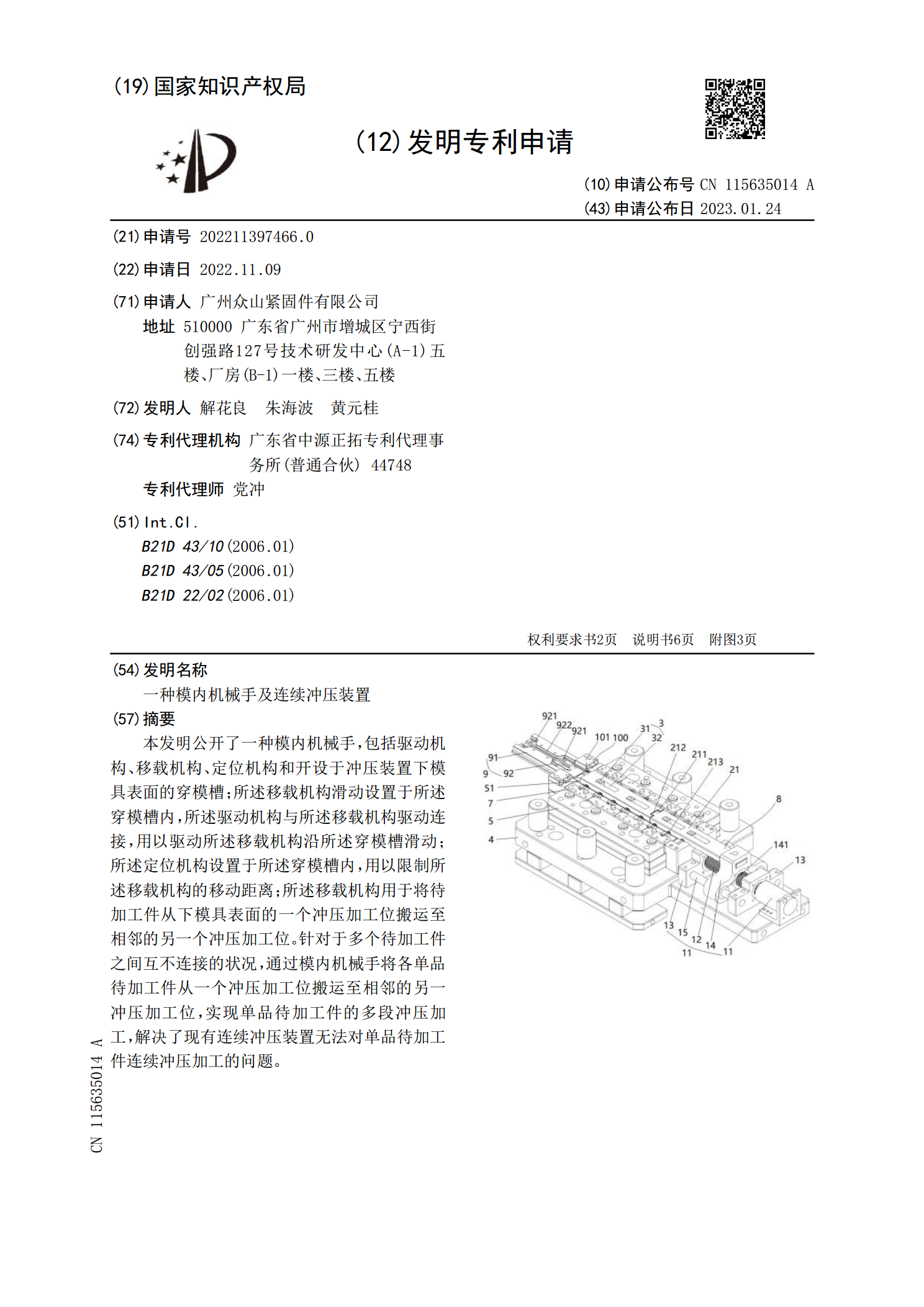
一种模内机械手及连续冲压装置.pdf
本发明公开了一种模内机械手,包括驱动机构、移载机构、定位机构和开设于冲压装置下模具表面的穿模槽;所述移载机构滑动设置于所述穿模槽内,所述驱动机构与所述移载机构驱动连接,用以驱动所述移载机构沿所述穿模槽滑动;所述定位机构设置于所述穿模槽内,用以限制所述移载机构的移动距离;所述移载机构用于将待加工件从下模具表面的一个冲压加工位搬运至相邻的另一个冲压加工位。针对于多个待加工件之间互不连接的状况,通过模内机械手将各单品待加工件从一个冲压加工位搬运至相邻的另一冲压加工位,实现单品待加工件的多段冲压加工,解决了现有连
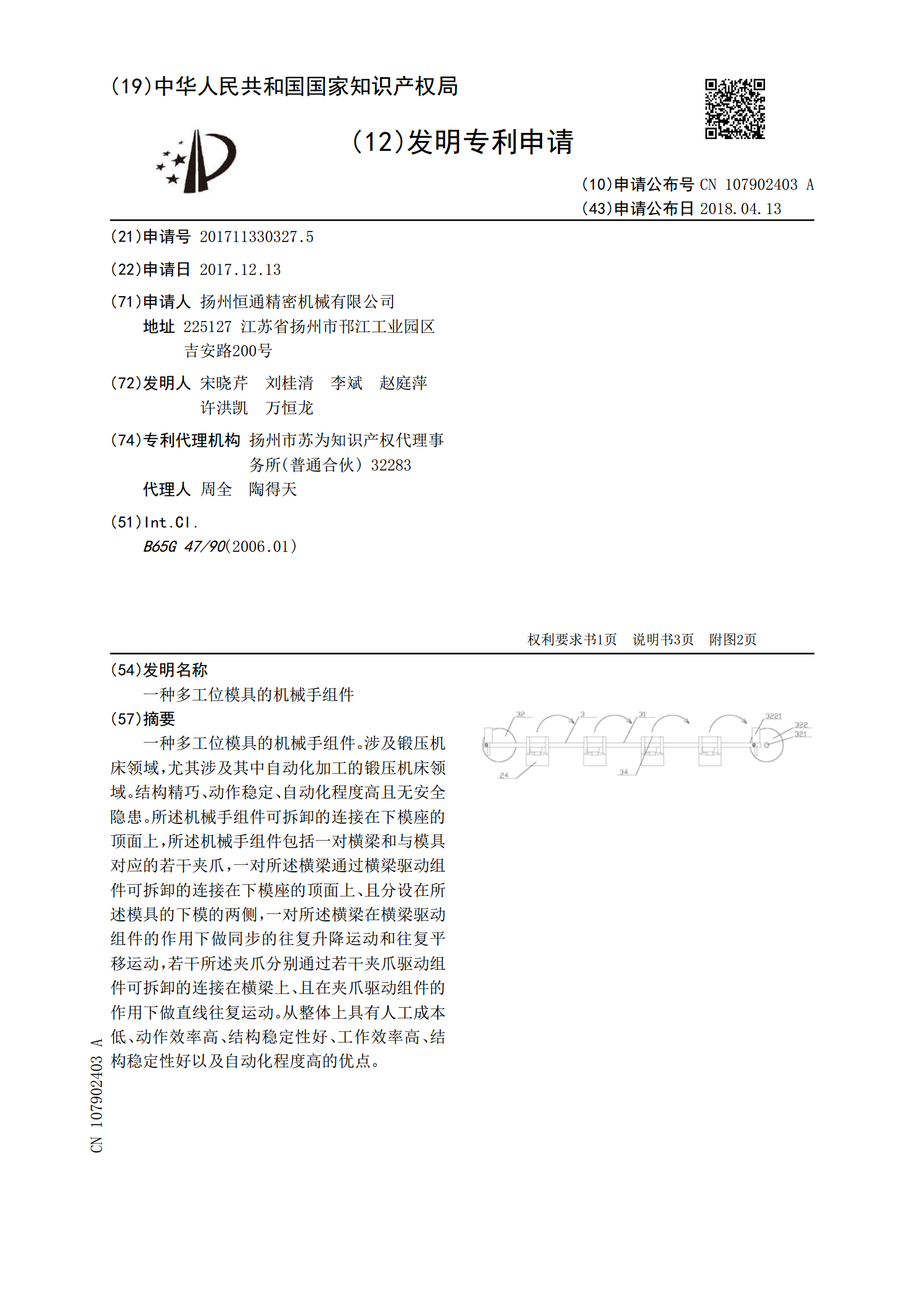
一种多工位模具的机械手组件.pdf
一种多工位模具的机械手组件。涉及锻压机床领域,尤其涉及其中自动化加工的锻压机床领域。结构精巧、动作稳定、自动化程度高且无安全隐患。所述机械手组件可拆卸的连接在下模座的顶面上,所述机械手组件包括一对横梁和与模具对应的若干夹爪,一对所述横梁通过横梁驱动组件可拆卸的连接在下模座的顶面上、且分设在所述模具的下模的两侧,一对所述横梁在横梁驱动组件的作用下做同步的往复升降运动和往复平移运动,若干所述夹爪分别通过若干夹爪驱动组件可拆卸的连接在横梁上、且在夹爪驱动组件的作用下做直线往复运动。从整体上具有人工成本低、动作效
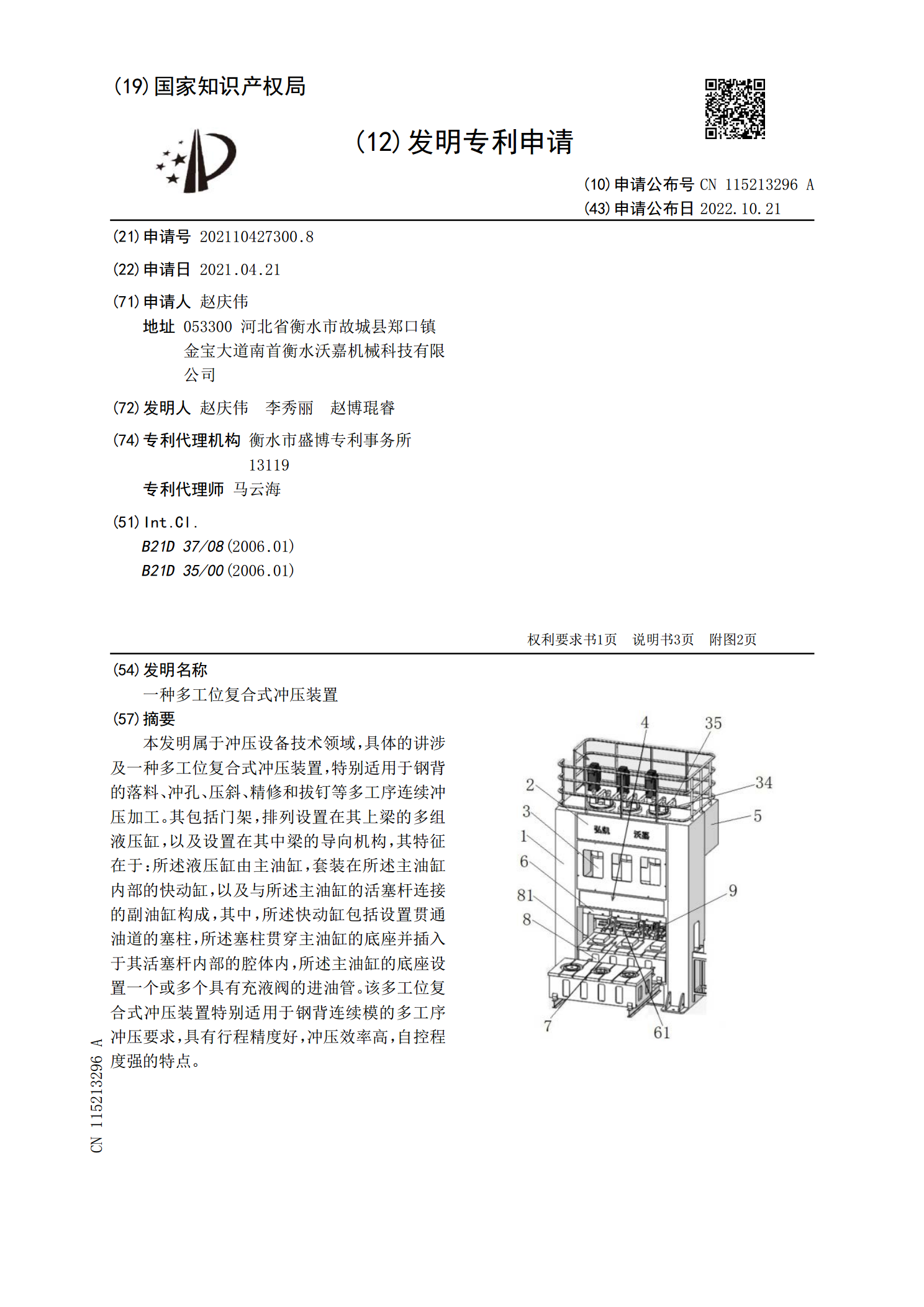
一种多工位复合式冲压装置.pdf
本发明属于冲压设备技术领域,具体的讲涉及一种多工位复合式冲压装置,特别适用于钢背的落料、冲孔、压斜、精修和拔钉等多工序连续冲压加工。其包括门架,排列设置在其上梁的多组液压缸,以及设置在其中梁的导向机构,其特征在于:所述液压缸由主油缸,套装在所述主油缸内部的快动缸,以及与所述主油缸的活塞杆连接的副油缸构成,其中,所述快动缸包括设置贯通油道的塞柱,所述塞柱贯穿主油缸的底座并插入于其活塞杆内部的腔体内,所述主油缸的底座设置一个或多个具有充液阀的进油管。该多工位复合式冲压装置特别适用于钢背连续模的多工序冲压要求,