
一种‘7’字型铁件机械手取件镶入注塑自动化设备.pdf

An****99

1/7
2/7
3/7
4/7
5/7
6/7

7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种‘7’字型铁件机械手取件镶入注塑自动化设备.pdf
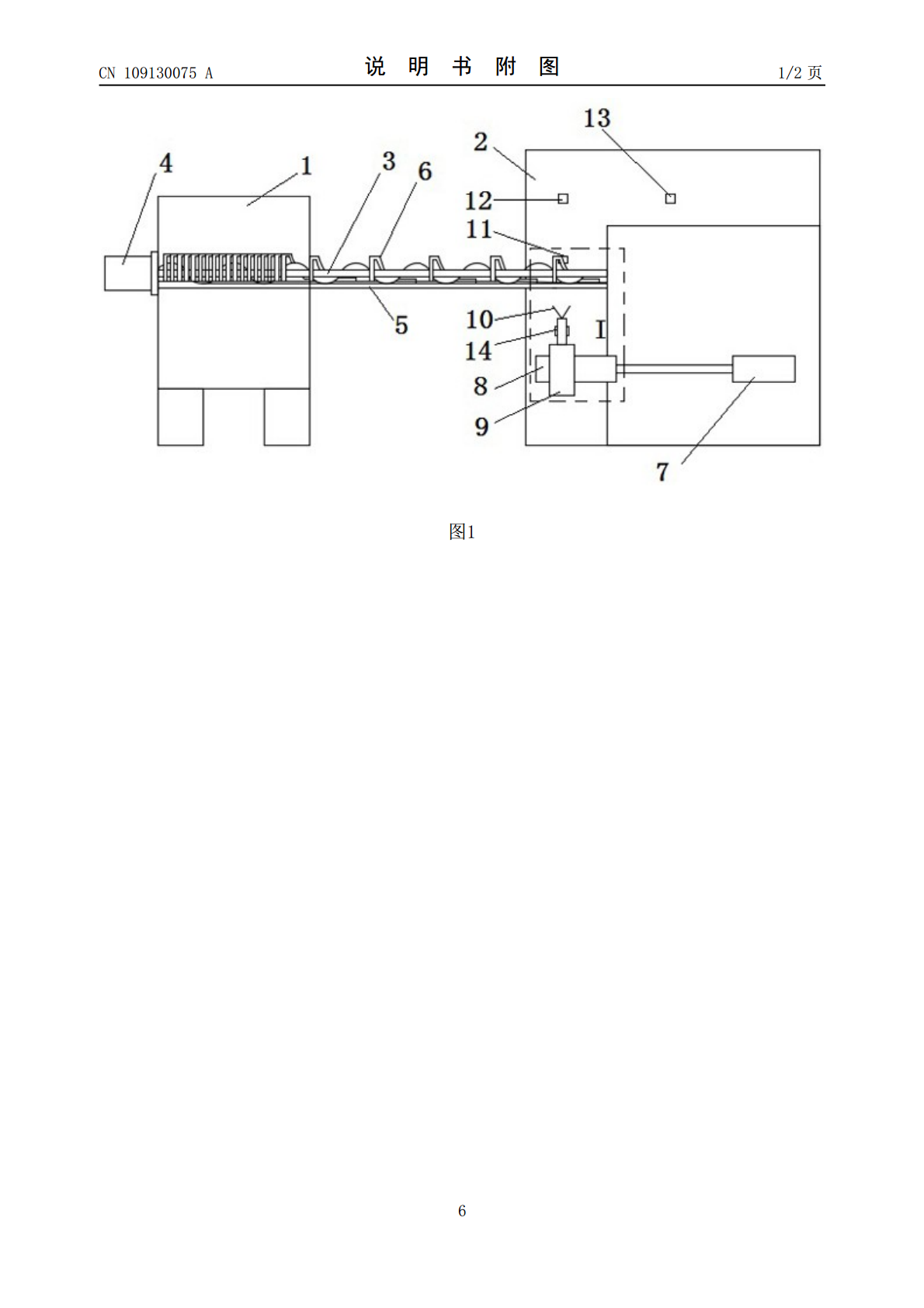
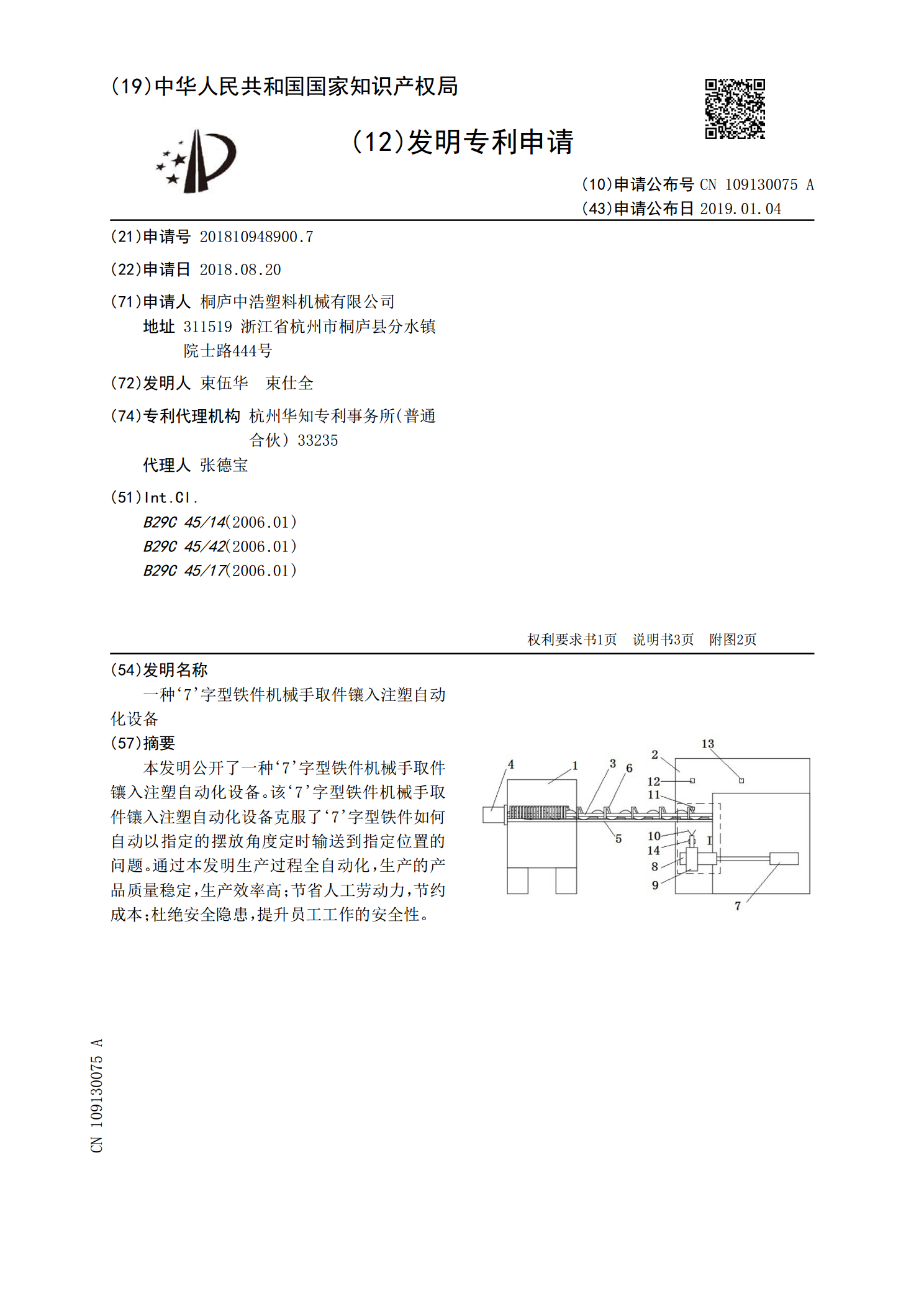
本发明公开了一种‘7’字型铁件机械手取件镶入注塑自动化设备。该‘7’字型铁件机械手取件镶入注塑自动化设备克服了‘7’字型铁件如何自动以指定的摆放角度定时输送到指定位置的问题。通过本发明生产过程全自动化,生产的产品质量稳定,生产效率高;节省人工劳动力,节约成本;杜绝安全隐患,提升员工工作的安全性。

一种注塑取件机械手.pdf
一种注塑取件机械手,解决现有技术存在的操作人员劳动强度大,取件效率低,作业成本高,取件操作过程中易磕碰,影响产品品质的问题。包括固定支架,固定支架上设置有两组用于勾住零件背面的气动勾手机构,两组气动勾手机构之间设置有若干组用于夹固零件浇口的气动夹手机构,气动勾手机构的外侧、固定支架的周边,还设置有若干组用于吸固住零件正面的吸取机构,固定支架通过机械抓手连接部与机械手驱动臂相连。其设计合理,结构紧凑,能够对注塑饰件进行自动抓取,劳动强度低,生产效率高,并且,可有效保证产品质量,实用性强,使用可靠性好。
一种注塑机械手取件装置.pdf
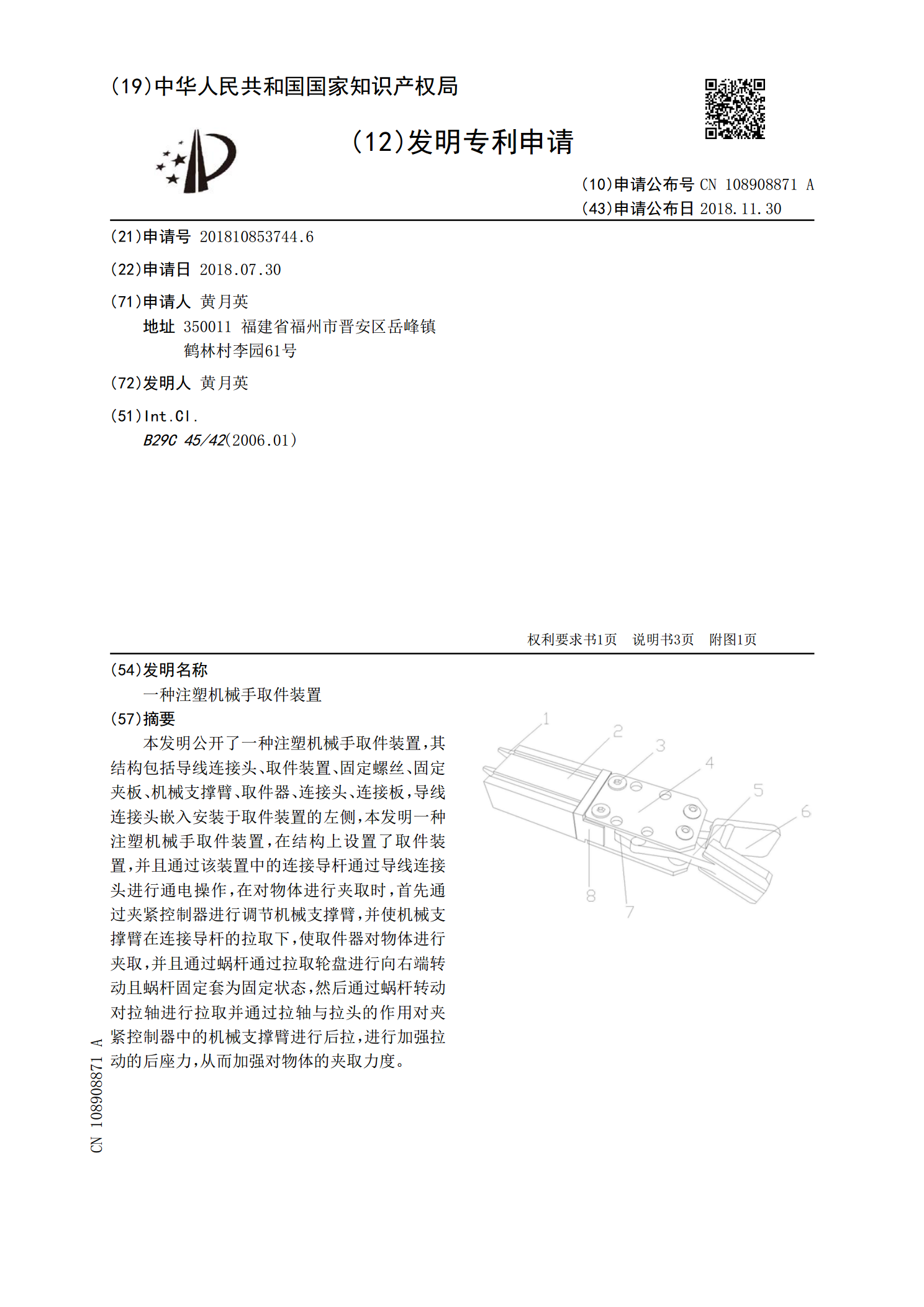
本发明公开了一种注塑机械手取件装置,其结构包括导线连接头、取件装置、固定螺丝、固定夹板、机械支撑臂、取件器、连接头、连接板,导线连接头嵌入安装于取件装置的左侧,本发明一种注塑机械手取件装置,在结构上设置了取件装置,并且通过该装置中的连接导杆通过导线连接头进行通电操作,在对物体进行夹取时,首先通过夹紧控制器进行调节机械支撑臂,并使机械支撑臂在连接导杆的拉取下,使取件器对物体进行夹取,并且通过蜗杆通过拉取轮盘进行向右端转动且蜗杆固定套为固定状态,然后通过蜗杆转动对拉轴进行拉取并通过拉轴与拉头的作用对夹紧控制器
一种自动化取件机械手.pdf
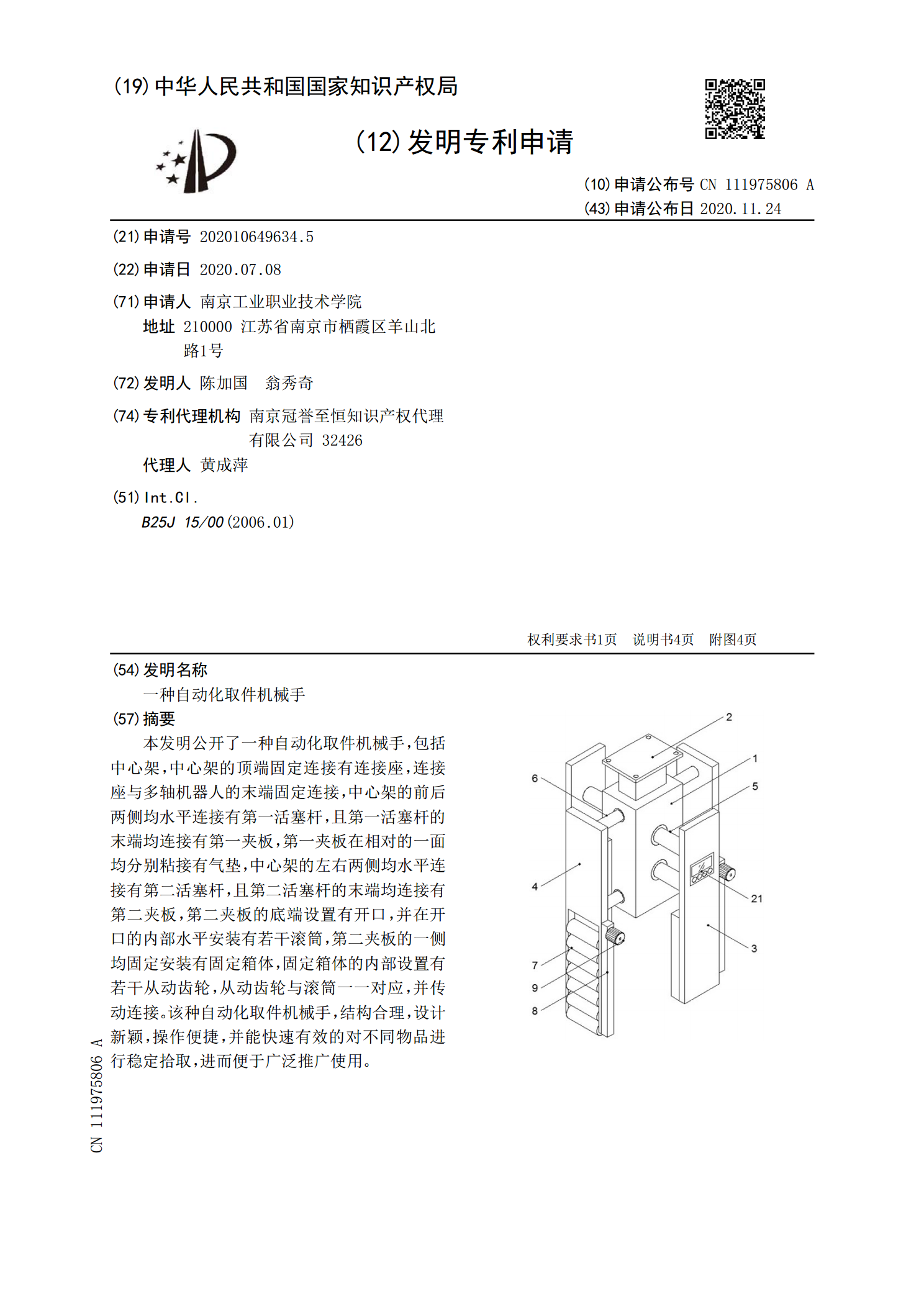
本发明公开了一种自动化取件机械手,包括中心架,中心架的顶端固定连接有连接座,连接座与多轴机器人的末端固定连接,中心架的前后两侧均水平连接有第一活塞杆,且第一活塞杆的末端均连接有第一夹板,第一夹板在相对的一面均分别粘接有气垫,中心架的左右两侧均水平连接有第二活塞杆,且第二活塞杆的末端均连接有第二夹板,第二夹板的底端设置有开口,并在开口的内部水平安装有若干滚筒,第二夹板的一侧均固定安装有固定箱体,固定箱体的内部设置有若干从动齿轮,从动齿轮与滚筒一一对应,并传动连接。该种自动化取件机械手,结构合理,设计新颖,操

一种自动化取件机械手.pdf
本发明公开了一种自动化取件机械手,包括:三维操控组件和机械手组件;三维操控组件用于带动机械手组件在三维空间内运动;机械手组件包括固定块、固定板、滑块、液压杆、连接架、支撑架、输送带和驱动构件;本发明采用三角形布置的带有输送带的支撑架对物品进行夹持,液压杆能够调节三个支撑架的尺寸间距,通过输送带向上运动即可将物品向上夹持;同时,当物品为筒状结构时,可以将三根支撑架伸入筒内,从内部支撑夹持,因此,本发明的带有输送带的支撑架可以采用向内夹持和向外支撑两种取件方式,可以根据不同的产品形状选择性调整取件夹持方式,通