
用于鞋面、鞋底的快速识别喷胶方法及系统.pdf

景福****90

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

用于鞋面、鞋底的快速识别喷胶方法及系统.pdf
本发明公开了提供一种基于机器视觉引导的鞋面、鞋底快速喷胶方法及系统,该方法包括上料、定位、路径识别、喷胶、烘干步骤。该系统包括有控制系统、传送带、视觉系统、喷胶机器人及烤炉。该方法及系统通过视觉系统对鞋面及鞋楦的位置及形状的识别,快速转换为喷胶机器人的工作路径,引导喷胶机器人完成对不同尺寸及形状的鞋面和鞋底的喷胶工作。在喷胶过程中,喷胶机器人无需预先对每个鞋型和尺寸进行耗时的路径校准,使得在同一条生产线上的鞋型和尺寸可以灵活多变,从而适应当前小批量多变化的市场要求,极大的提高生产效率。

一种转盘式鞋底自动喷胶机及其喷胶方法.pdf
本发明公开了一种转盘式鞋底自动喷胶机及其喷胶方法,所述方法包括以下步骤:S1、将待喷胶鞋底放置于取放工位的转盘上;S2、转盘旋转预定角度,使待喷胶鞋底到达等待工位;S3、转盘旋转预定角度,使待喷胶鞋底到达摄像工位;S4、3D扫描摄像装置拍摄待喷胶鞋底,控制装置处理所述拍摄到的图像,获得待喷胶鞋底的三维轮廓,并生成喷胶轨迹;S5、摄像完毕后,转盘旋转预定角度,使待喷胶鞋底到达喷胶工位;S6、控制装置控制协作机器人运动,使喷胶枪按所述喷胶轨迹对待喷胶鞋底进行喷胶;S7、喷胶完毕后,转盘旋转预定角度,使已喷胶鞋
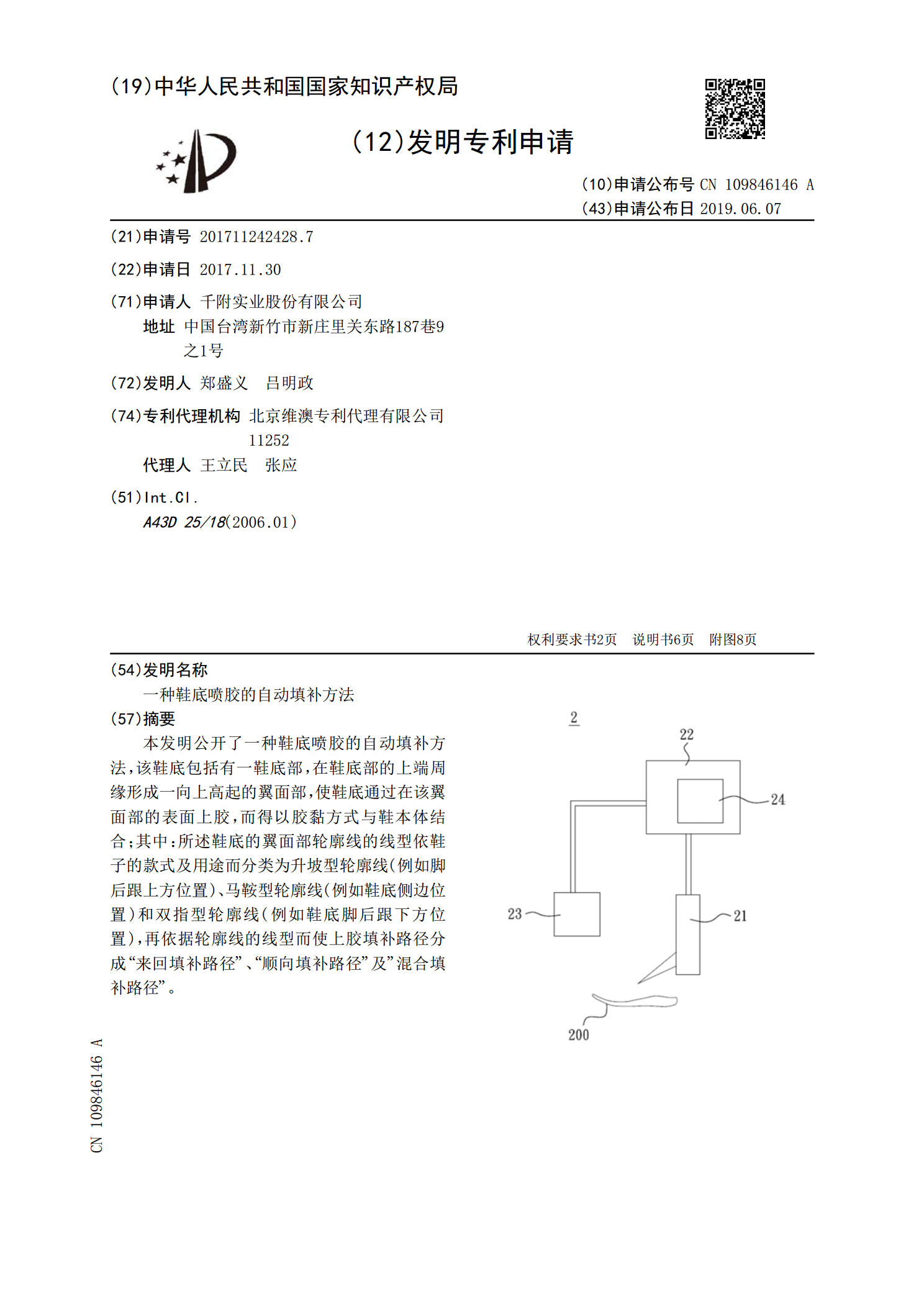
一种鞋底喷胶的自动填补方法.pdf
本发明公开了一种鞋底喷胶的自动填补方法,该鞋底包括有一鞋底部,在鞋底部的上端周缘形成一向上高起的翼面部,使鞋底通过在该翼面部的表面上胶,而得以胶黏方式与鞋本体结合;其中:所述鞋底的翼面部轮廓线的线型依鞋子的款式及用途而分类为升坡型轮廓线(例如脚后跟上方位置)、马鞍型轮廓线(例如鞋底侧边位置)和双指型轮廓线(例如鞋底脚后跟下方位置),再依据轮廓线的线型而使上胶填补路径分成“来回填补路径”、“顺向填补路径”及”混合填补路径”。

一种鞋面喷胶轨迹线的计算方法.pdf
本发明提供一种鞋面喷胶轨迹线的计算方法,首先通过线性激光扫描器扫描一组鞋底和鞋面,得到两组点云数据,再通过预处理使得原始点云对的矩阵大小相同,而后通过SVD奇异矩阵分解法实现了粗匹配,使得点云对方向一致且相互靠近后,再通过ICP算法实现精确配准,获得点云对之间的坐标变换关系。同时由于实际生产需求,利用Bezier曲线算法实现了鞋底轮廓点云集的局部拟合变形,实现了鞋面喷胶轨迹线的精确计算,从而实现了喷胶自动化。
基于CAD模型的鞋底喷胶轨迹生成方法.pdf
第2O卷第5期计算机辅助设计与图形学学报V01.2O.No.52008年5月JOURNAlOFCOMPUTER—AIDEDDESIGN8LCOMPUTERGRAPHICSMay.2008基于CAD模型的鞋底喷胶轨迹生成方法武传宇贺磊盈李秦川胡旭东(浙江理工大学机械与自动控制学院杭州310018)cywu@zstu.edu.cn摘要针对数字化制鞋生产的需要,提出一种自动生成鞋底喷胶轨迹的方法.该方法首先从三维鞋楦CAD模型中提取鞋底轮廓线,计算其在鞋底曲面的偏置曲线作为轨迹曲线,采用等参数方法对轨迹曲线进行