
代价地图限制通行区域设置方法.pdf

努力****爱敏


1/6

2/6
3/6

4/6
5/6

6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
代价地图限制通行区域设置方法.pdf
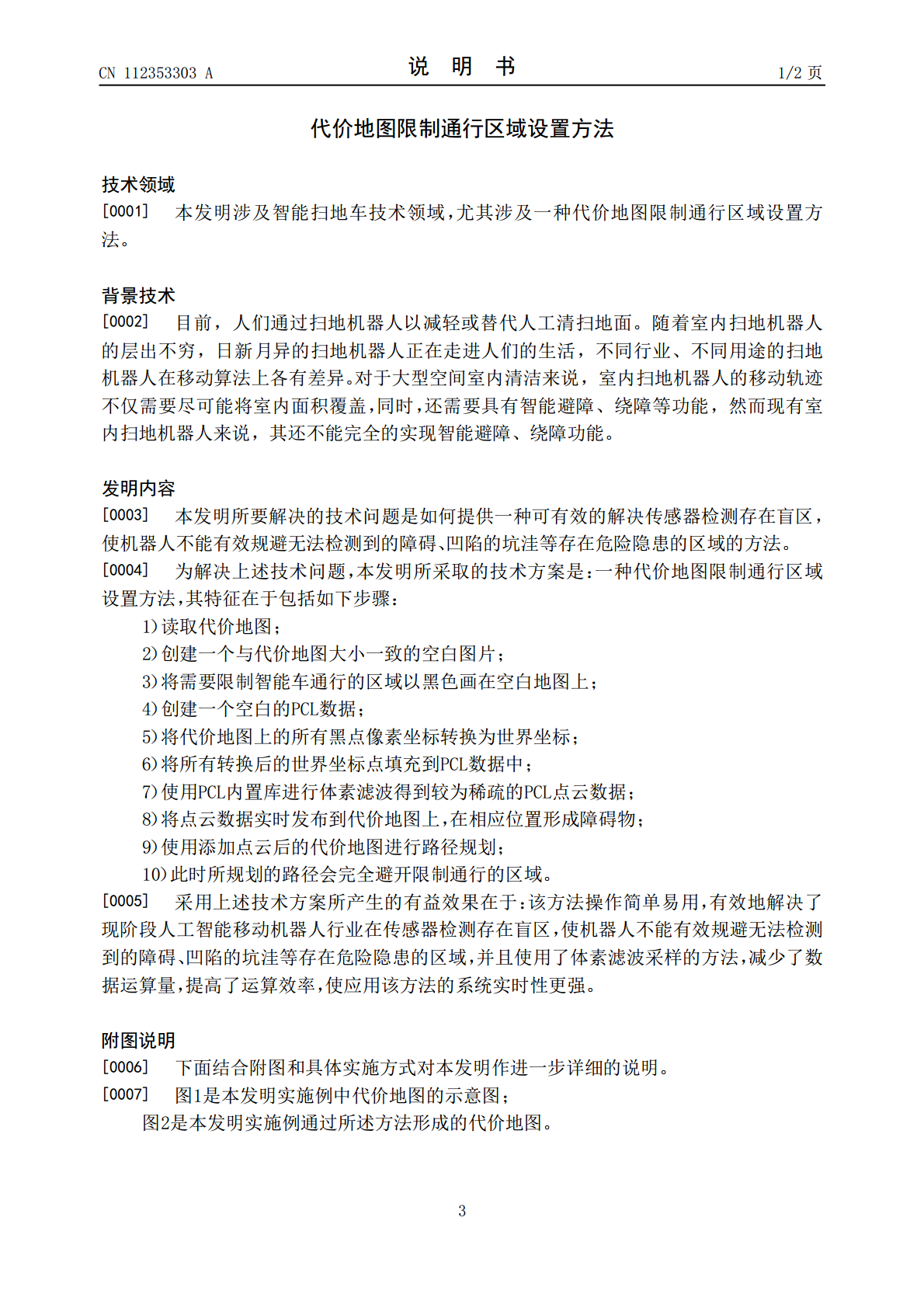
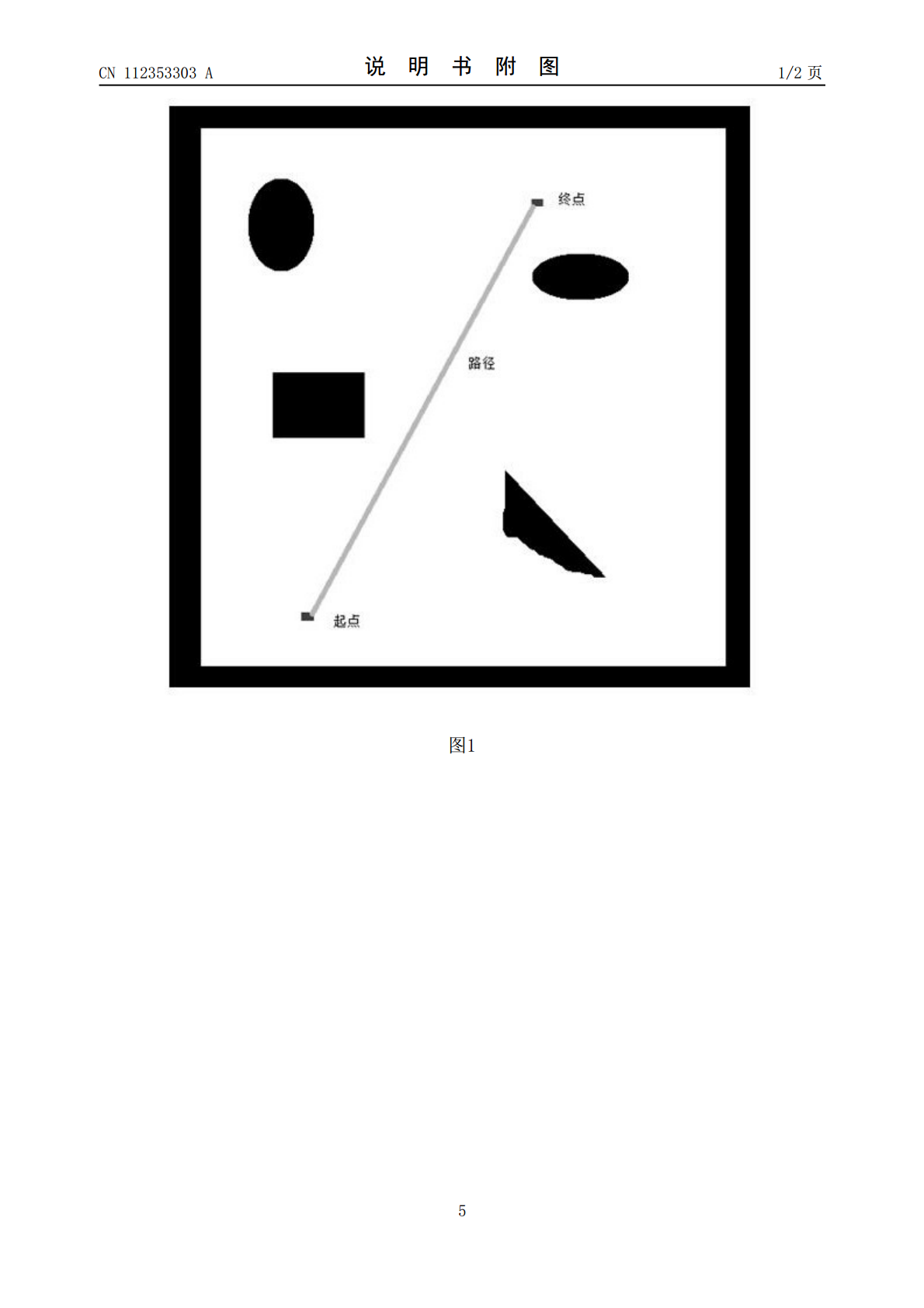
本发明公开了一种代价地图限制通行区域设置方法,包括如下步骤:读取代价地图;创建一个与代价地图大小一致的空白图片;将需要限制智能车通行的区域以黑色画在空白地图上;创建一个空白的PCL数据;将代价地图上的所有黑点像素坐标转换为世界坐标;将所有转换后的世界坐标点填充到PCL数据中;使用PCL内置库进行体素滤波得到较为稀疏的PCL点云数据;将点云数据实时发布到代价地图上,在相应位置形成障碍物;使用添加点云后的代价地图进行路径规划;此时所规划的路径会完全避开限制通行的区域。该方法操作简单易用,有效地解决了现阶段人工

代价地图区域划分方法.pdf
本发明公开了一种代价地图区域划分方法,包括如下步骤:将待划分区域的边界线条查找出来并计算每个线段的长度和方向角度;按方向角度分类,从零度到180度,每30度为一类,总共分为6类;分别计算每一类的线段长度的和,取其中线段和最长的一类求取其最终旋转方向角度θ

代价地图区域选定的方法.pdf
本发明公开了一种代价地图区域选定的方法,包括如下步骤:在初始地图中添加参考点,以该点为起点做漫水填充,将以该点为参考点所形成的的闭合区域做颜色填充,作为禁区;在禁区以外的区域填充不同的颜色作为可到达区域,完成代价地图的设置。所述方法可在编辑禁区的过程中,实时体现出移动机器人可到达区域,因此更直观,显示效果更好。

基于典型栅格地图的代价地图改进方法.pptx
基于典型栅格地图的代价地图改进方法目录引言背景介绍栅格地图和代价地图的概述改进方法的必要性典型栅格地图的代价地图典型栅格地图的特性典型栅格地图的代价地图生成方法典型栅格地图的代价地图的优缺点基于典型栅格地图的代价地图改进方法改进方法的思路改进方法的实现方式改进方法的优缺点比较实验验证与结果分析实验设置实验结果与分析结果与现有方法的比较结论与展望研究结论研究展望感谢观看
车辆桥梁通行限制的实现方法.pdf
本发明涉及一种车辆桥梁通行限制的实现方法,其通过在桥头设置限行装置,配合远程控制中心以及无线网络,能限制通行车辆的高度,本发明通过三个倒T形限高杆结构,将桥的入口分为三个区域,这样能有效限定特定高度的车辆从指定区域进入桥体,最大程度的保证桥体的安全,避免不规范的车辆压坏桥身,而且通过远程无线的集中控制,不仅能实现通行车辆的报备,而且能在特殊车辆通行时进行限高控制,克服了传统限高装置高度不能灵活调整的弊端。