
基于典型栅格地图的代价地图改进方法.pptx

快乐****蜜蜂


1/10

2/10

3/10
4/10

5/10
6/10

7/10
8/10

9/10
10/10
亲,该文档总共22页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

基于典型栅格地图的代价地图改进方法.pptx
基于典型栅格地图的代价地图改进方法目录引言背景介绍栅格地图和代价地图的概述改进方法的必要性典型栅格地图的代价地图典型栅格地图的特性典型栅格地图的代价地图生成方法典型栅格地图的代价地图的优缺点基于典型栅格地图的代价地图改进方法改进方法的思路改进方法的实现方式改进方法的优缺点比较实验验证与结果分析实验设置实验结果与分析结果与现有方法的比较结论与展望研究结论研究展望感谢观看

基于栅格价值地图的基站规划方法研究.docx
基于栅格价值地图的基站规划方法研究摘要:随着移动通信的普及和用户使用移动网络的要求不断提高,基站布局规划成为了通信网络优化的重要环节。本文以栅格价值地图为基础,提出了基于栅格价值地图的基站规划方法,该方法可以在保证网络信号覆盖率的前提下,优化基站的数量和布局,从而降低成本并提高网络性能。同时,本文还介绍了栅格价值地图的概念和生成方法,以及基站布局对网络性能的影响。最后,通过实验验证了该方法的有效性和可行性。关键词:移动通信,栅格价值地图,基站规划,网络性能引言:随着5G时代的来临,移动通信技术得到了飞速发

基于概率匹配的栅格地图拼接算法.docx
基于概率匹配的栅格地图拼接算法基于概率匹配的栅格地图拼接算法摘要:栅格地图是一种常见的地图表示方法,它被广泛应用于计算机视觉、机器人导航等领域。栅格地图拼接算法是将多个栅格地图拼接成一个更大的地图的关键步骤。本论文提出了一种基于概率匹配的栅格地图拼接算法,该算法通过计算栅格单元之间的相似度,利用概率模型对栅格地图进行拼接,具有高效性和准确性。1.引言随着机器人导航和计算机视觉等领域的快速发展,栅格地图被广泛应用于环境建模和分析。栅格地图将环境划分为一系列离散的栅格单元,每个栅格单元表示一个具体的空间状态。

基于扇形栅格地图的移动机器人地图创建.docx
基于扇形栅格地图的移动机器人地图创建摘要:地图构建是移动机器人导航和路径规划的基本步骤之一。基于扇形栅格地图的移动机器人地图构建是一种常见的方法。本文介绍了扇形栅格地图的概念、构建方法以及应用。同时,本文探讨了扇形栅格地图的优缺点,并举例说明了其在实际应用中的性能。关键词:移动机器人,地图构建,扇形栅格地图,优缺点,应用引言:移动机器人的地图构建是基于环境感知的一个重要应用领域。地图构建可以实现机器人在环境中的自主导航和路径规划。传统的地图构建方法包括全局建图和局部建图。全局建图通常涉及到环境的静态建模,
一种基于栅格地图模型的改进AGV路径规划算法.pdf
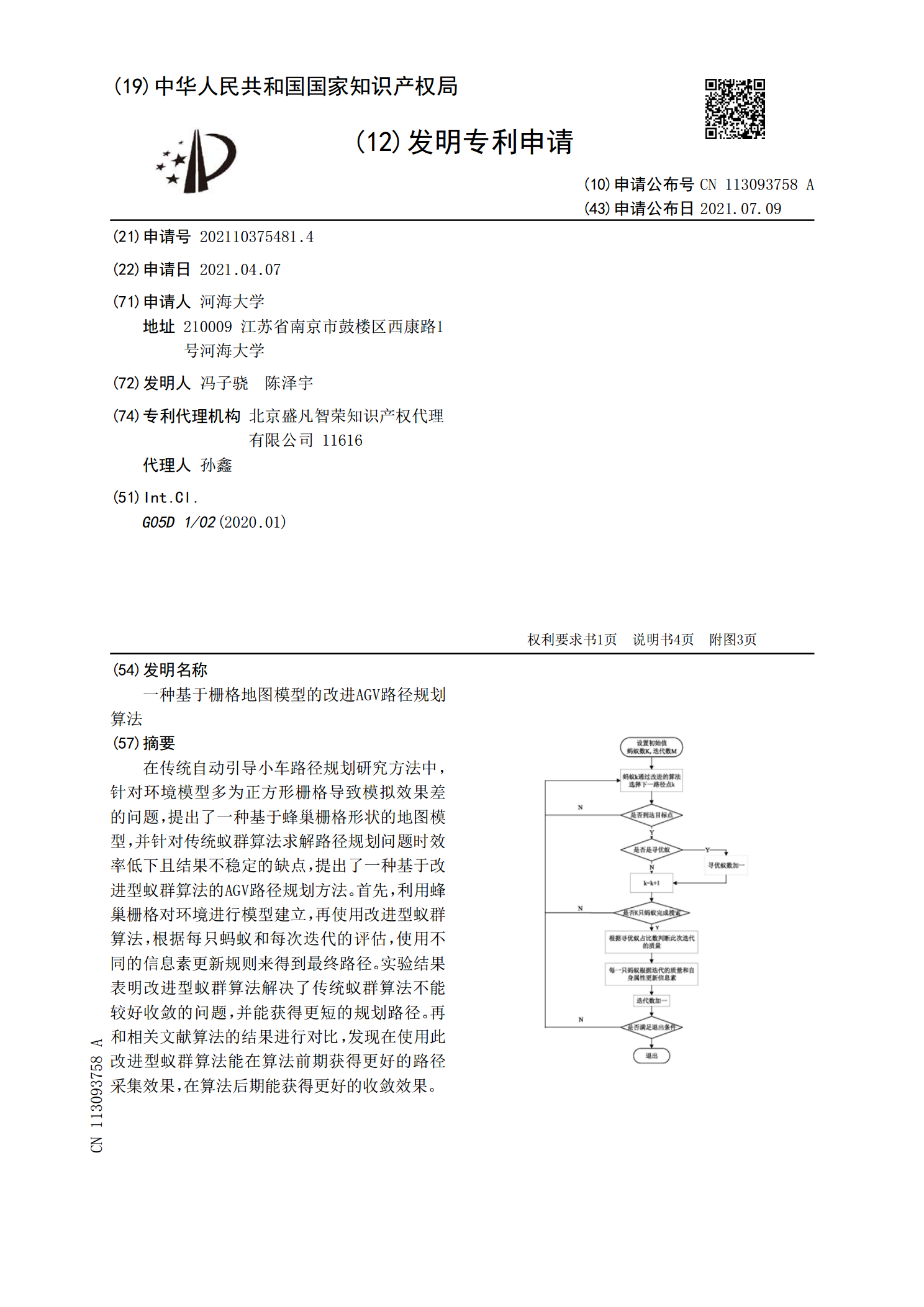
在传统自动引导小车路径规划研究方法中,针对环境模型多为正方形栅格导致模拟效果差的问题,提出了一种基于蜂巢栅格形状的地图模型,并针对传统蚁群算法求解路径规划问题时效率低下且结果不稳定的缺点,提出了一种基于改进型蚁群算法的AGV路径规划方法。首先,利用蜂巢栅格对环境进行模型建立,再使用改进型蚁群算法,根据每只蚂蚁和每次迭代的评估,使用不同的信息素更新规则来得到最终路径。实验结果表明改进型蚁群算法解决了传统蚁群算法不能较好收敛的问题,并能获得更短的规划路径。再和相关文献算法的结果进行对比,发现在使用此改进型蚁群