
井下障碍物检测方法、系统和控制装置.pdf

是你****岺呀

1/10
2/10
3/10
4/10
5/10
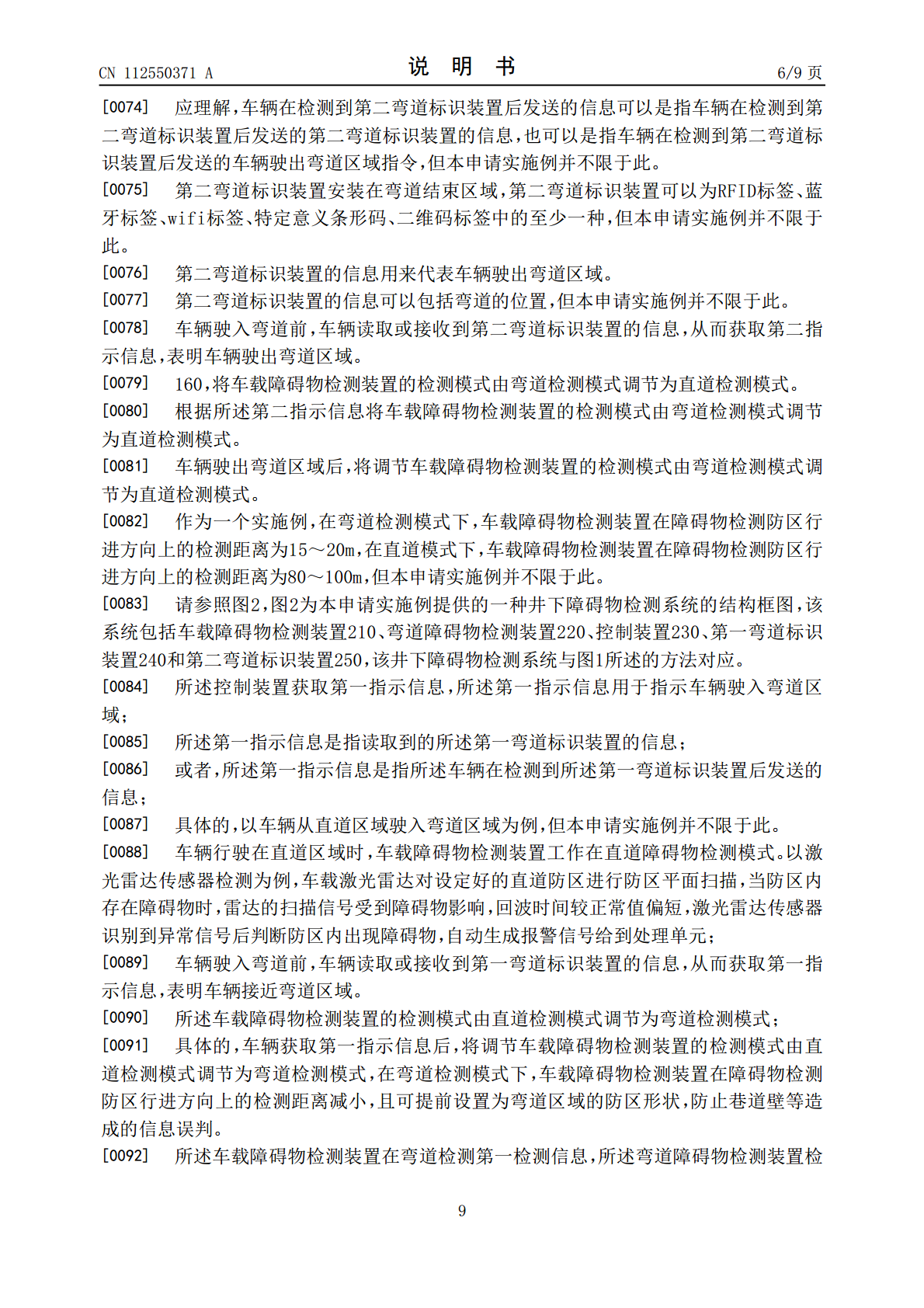
6/10
7/10
8/10
9/10
10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
井下障碍物检测方法、系统和控制装置.pdf
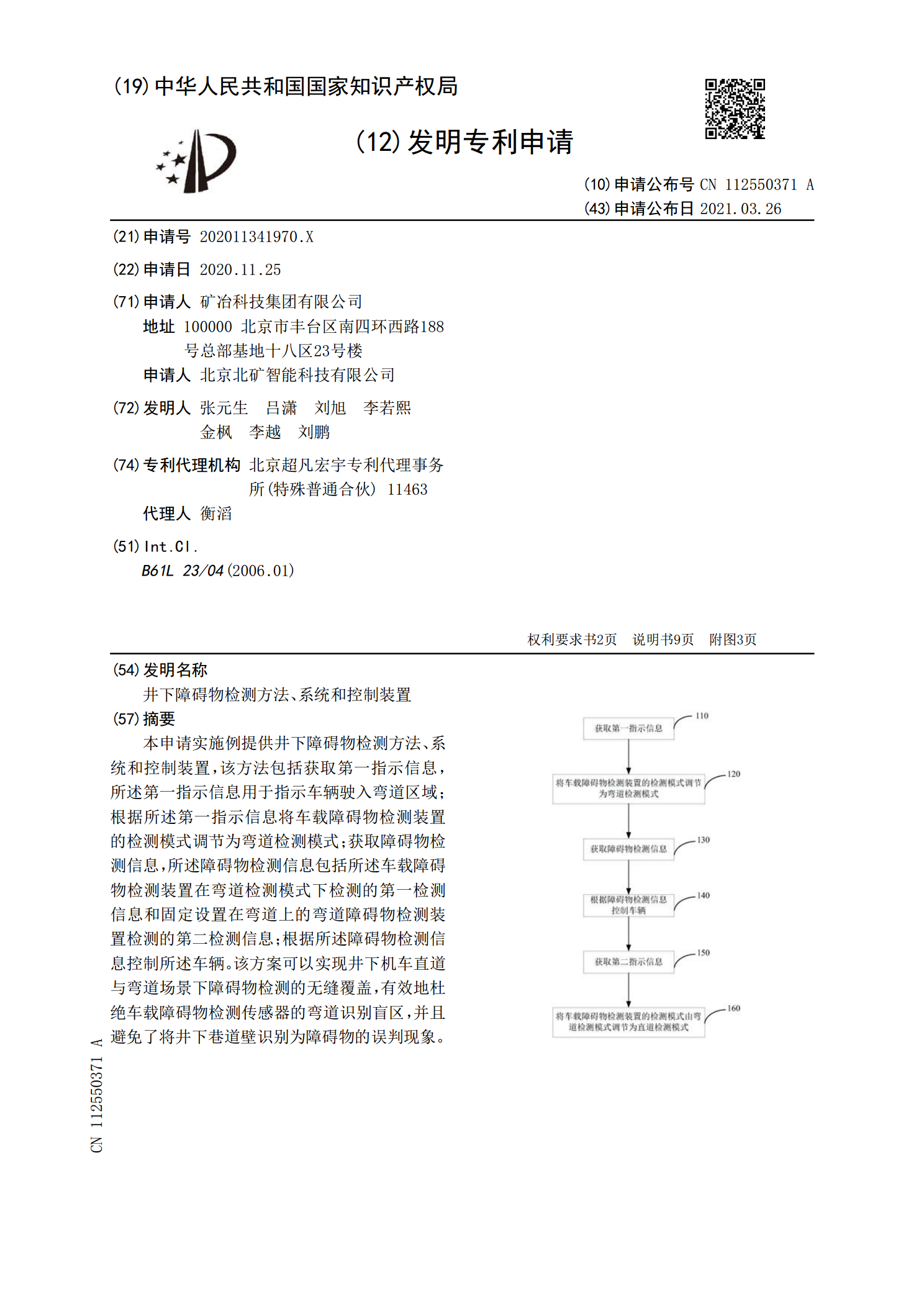
本申请实施例提供井下障碍物检测方法、系统和控制装置,该方法包括获取第一指示信息,所述第一指示信息用于指示车辆驶入弯道区域;根据所述第一指示信息将车载障碍物检测装置的检测模式调节为弯道检测模式;获取障碍物检测信息,所述障碍物检测信息包括所述车载障碍物检测装置在弯道检测模式下检测的第一检测信息和固定设置在弯道上的弯道障碍物检测装置检测的第二检测信息;根据所述障碍物检测信息控制所述车辆。该方案可以实现井下机车直道与弯道场景下障碍物检测的无缝覆盖,有效地杜绝车载障碍物检测传感器的弯道识别盲区,并且避免了将井下巷道
车辆关闭装置障碍物检测系统和方法.pdf
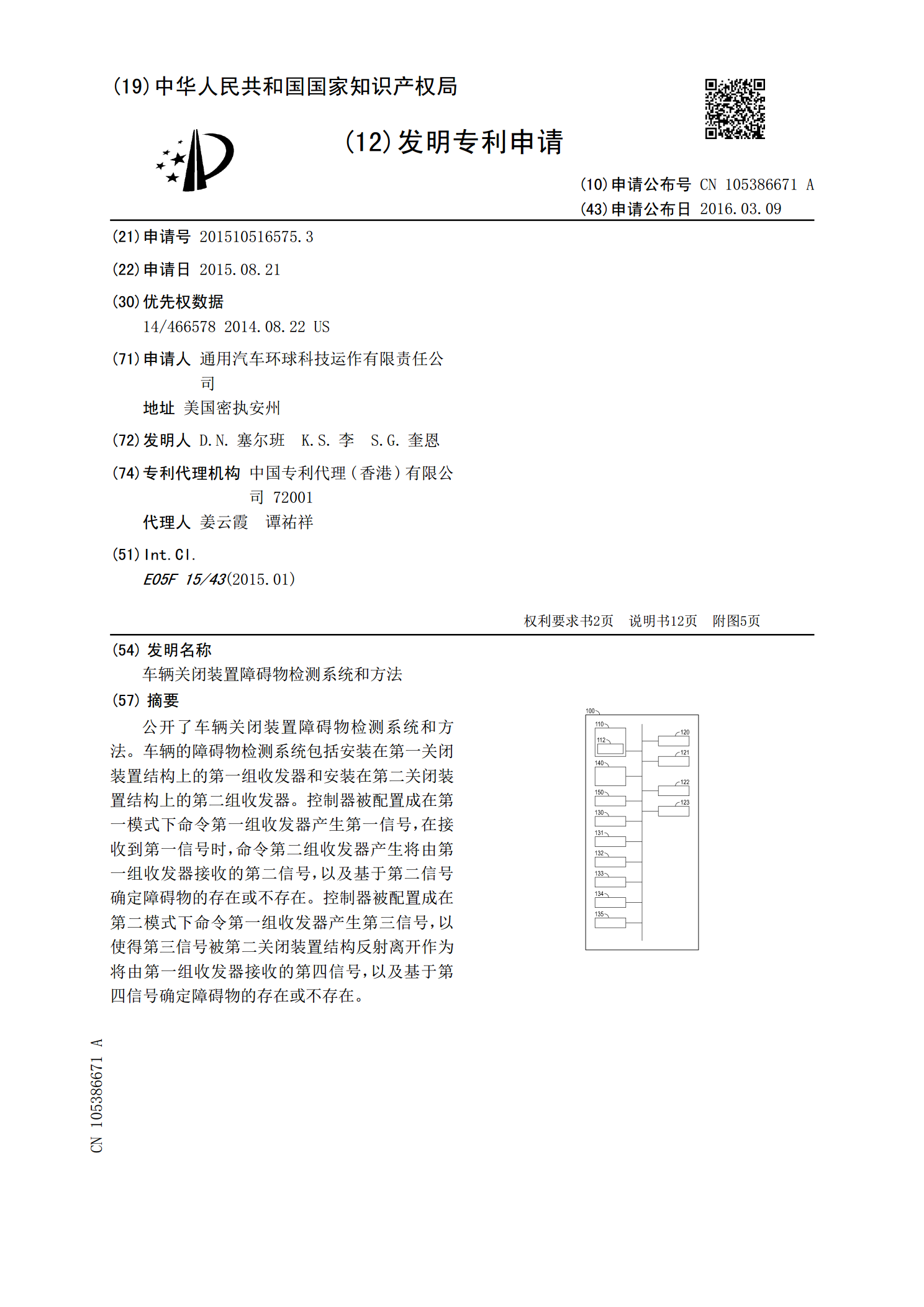
公开了车辆关闭装置障碍物检测系统和方法。车辆的障碍物检测系统包括安装在第一关闭装置结构上的第一组收发器和安装在第二关闭装置结构上的第二组收发器。控制器被配置成在第一模式下命令第一组收发器产生第一信号,在接收到第一信号时,命令第二组收发器产生将由第一组收发器接收的第二信号,以及基于第二信号确定障碍物的存在或不存在。控制器被配置成在第二模式下命令第一组收发器产生第三信号,以使得第三信号被第二关闭装置结构反射离开作为将由第一组收发器接收的第四信号,以及基于第四信号确定障碍物的存在或不存在。
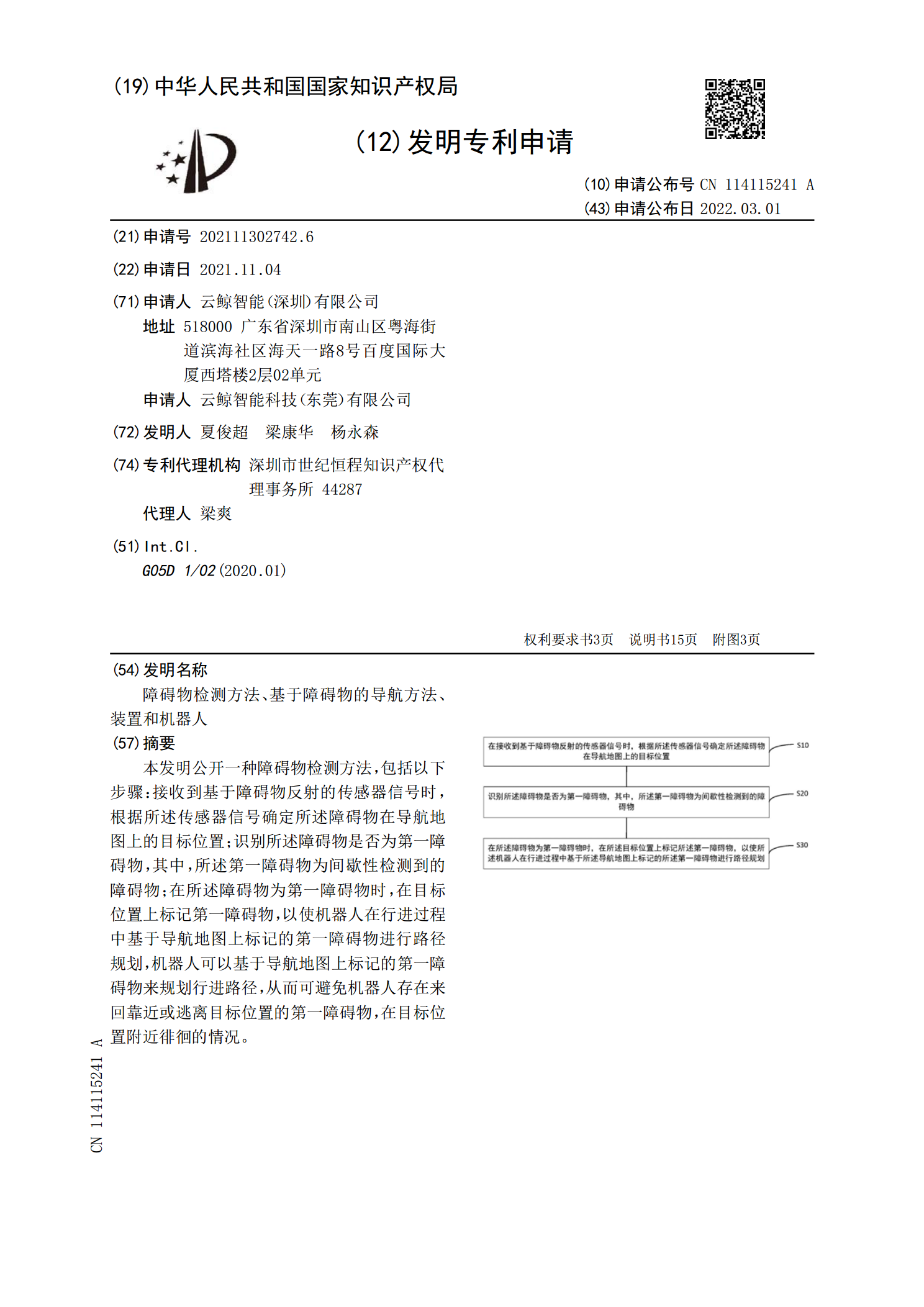
障碍物检测方法、基于障碍物的导航方法、装置和机器人.pdf
本发明公开一种障碍物检测方法,包括以下步骤:接收到基于障碍物反射的传感器信号时,根据所述传感器信号确定所述障碍物在导航地图上的目标位置;识别所述障碍物是否为第一障碍物,其中,所述第一障碍物为间歇性检测到的障碍物;在所述障碍物为第一障碍物时,在目标位置上标记第一障碍物,以使机器人在行进过程中基于导航地图上标记的第一障碍物进行路径规划,机器人可以基于导航地图上标记的第一障碍物来规划行进路径,从而可避免机器人存在来回靠近或逃离目标位置的第一障碍物,在目标位置附近徘徊的情况。
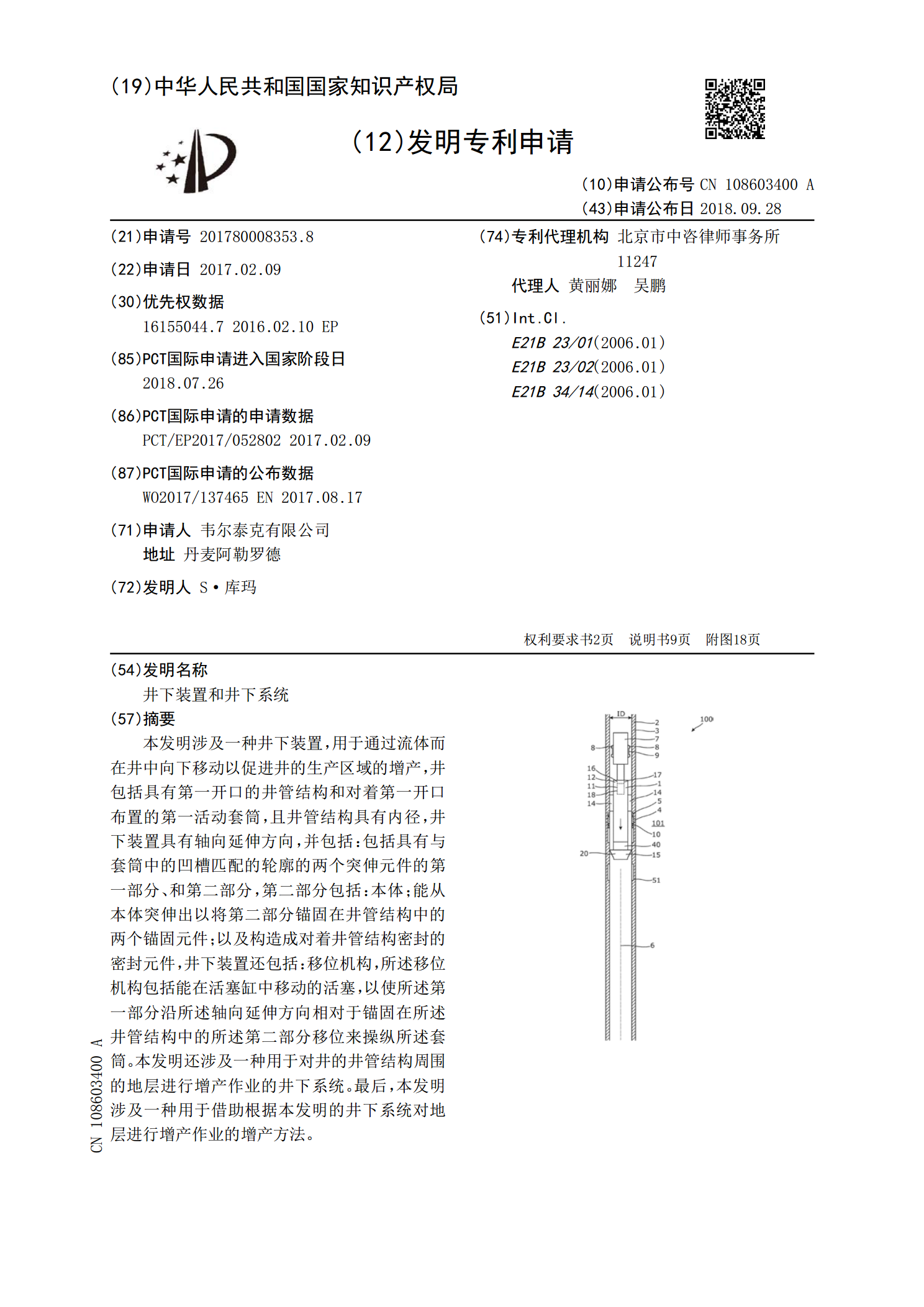
井下装置和井下系统.pdf
本发明涉及一种井下装置,用于通过流体而在井中向下移动以促进井的生产区域的增产,井包括具有第一开口的井管结构和对着第一开口布置的第一活动套筒,且井管结构具有内径,井下装置具有轴向延伸方向,并包括:包括具有与套筒中的凹槽匹配的轮廓的两个突伸元件的第一部分、和第二部分,第二部分包括:本体;能从本体突伸出以将第二部分锚固在井管结构中的两个锚固元件;以及构造成对着井管结构密封的密封元件,井下装置还包括:移位机构,所述移位机构包括能在活塞缸中移动的活塞,以使所述第一部分沿所述轴向延伸方向相对于锚固在所述井管结构中的所
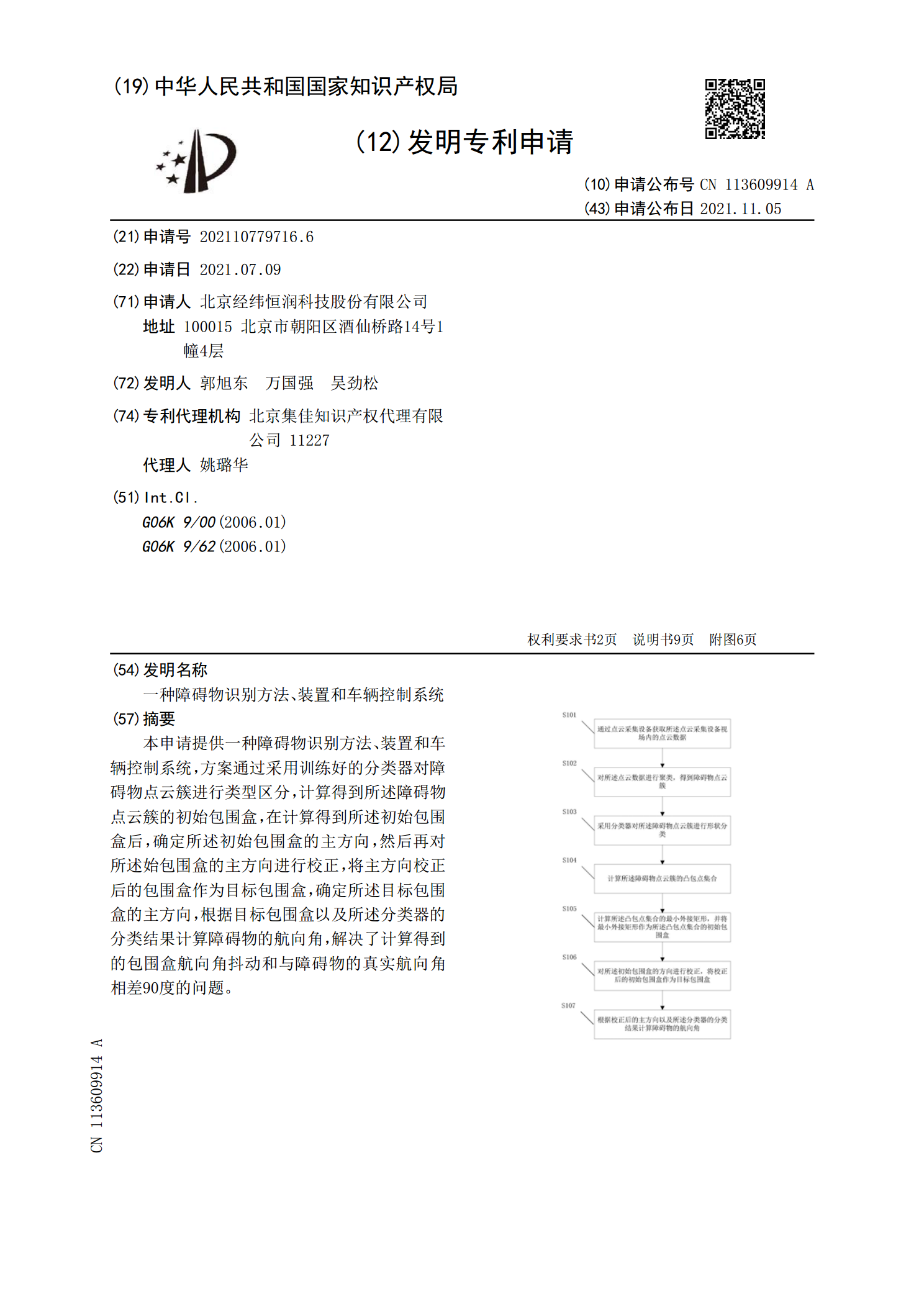
一种障碍物识别方法、装置和车辆控制系统.pdf
本申请提供一种障碍物识别方法、装置和车辆控制系统,方案通过采用训练好的分类器对障碍物点云簇进行类型区分,计算得到所述障碍物点云簇的初始包围盒,在计算得到所述初始包围盒后,确定所述初始包围盒的主方向,然后再对所述始包围盒的主方向进行校正,将主方向校正后的包围盒作为目标包围盒,确定所述目标包围盒的主方向,根据目标包围盒以及所述分类器的分类结果计算障碍物的航向角,解决了计算得到的包围盒航向角抖动和与障碍物的真实航向角相差90度的问题。