
一种障碍物识别方法、装置和车辆控制系统.pdf

阳炎****找我

1/10
2/10
3/10
4/10

5/10
6/10

7/10
8/10

9/10

10/10
亲,该文档总共18页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种障碍物识别方法、装置和车辆控制系统.pdf
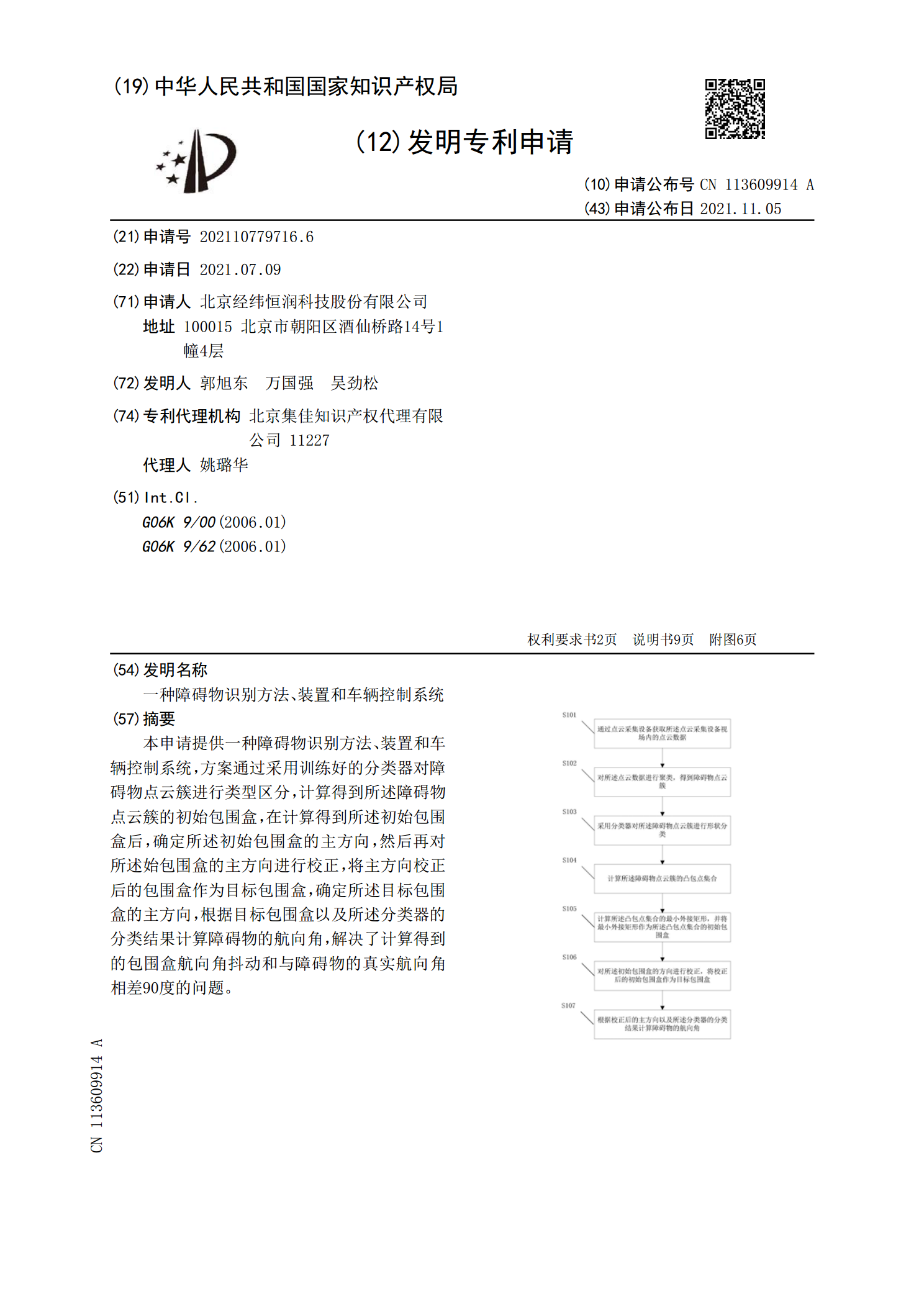
本申请提供一种障碍物识别方法、装置和车辆控制系统,方案通过采用训练好的分类器对障碍物点云簇进行类型区分,计算得到所述障碍物点云簇的初始包围盒,在计算得到所述初始包围盒后,确定所述初始包围盒的主方向,然后再对所述始包围盒的主方向进行校正,将主方向校正后的包围盒作为目标包围盒,确定所述目标包围盒的主方向,根据目标包围盒以及所述分类器的分类结果计算障碍物的航向角,解决了计算得到的包围盒航向角抖动和与障碍物的真实航向角相差90度的问题。
障碍物识别方法和装置以及驾驶方法和装置.pdf
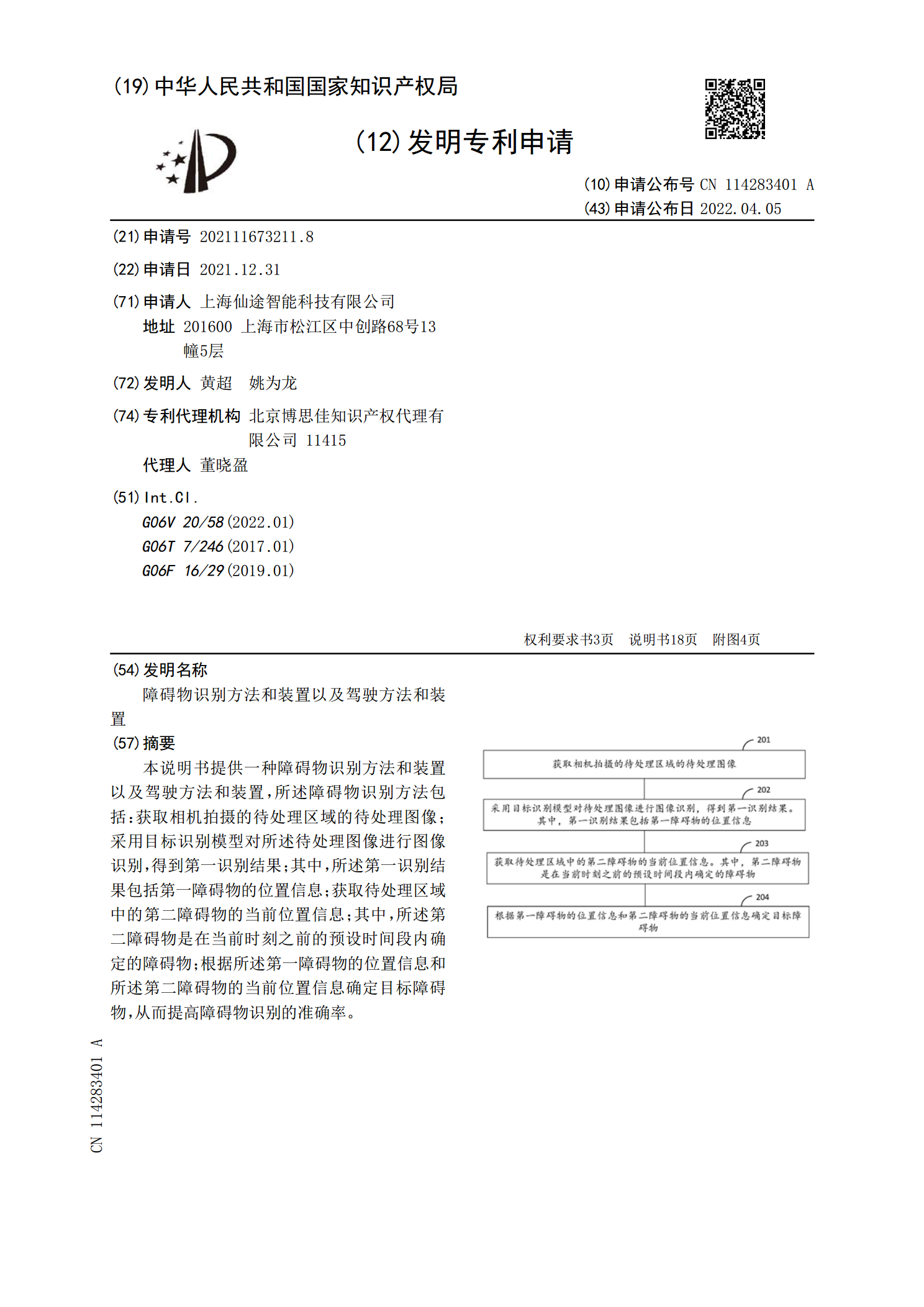
本说明书提供一种障碍物识别方法和装置以及驾驶方法和装置,所述障碍物识别方法包括:获取相机拍摄的待处理区域的待处理图像;采用目标识别模型对所述待处理图像进行图像识别,得到第一识别结果;其中,所述第一识别结果包括第一障碍物的位置信息;获取待处理区域中的第二障碍物的当前位置信息;其中,所述第二障碍物是在当前时刻之前的预设时间段内确定的障碍物;根据所述第一障碍物的位置信息和所述第二障碍物的当前位置信息确定目标障碍物,从而提高障碍物识别的准确率。
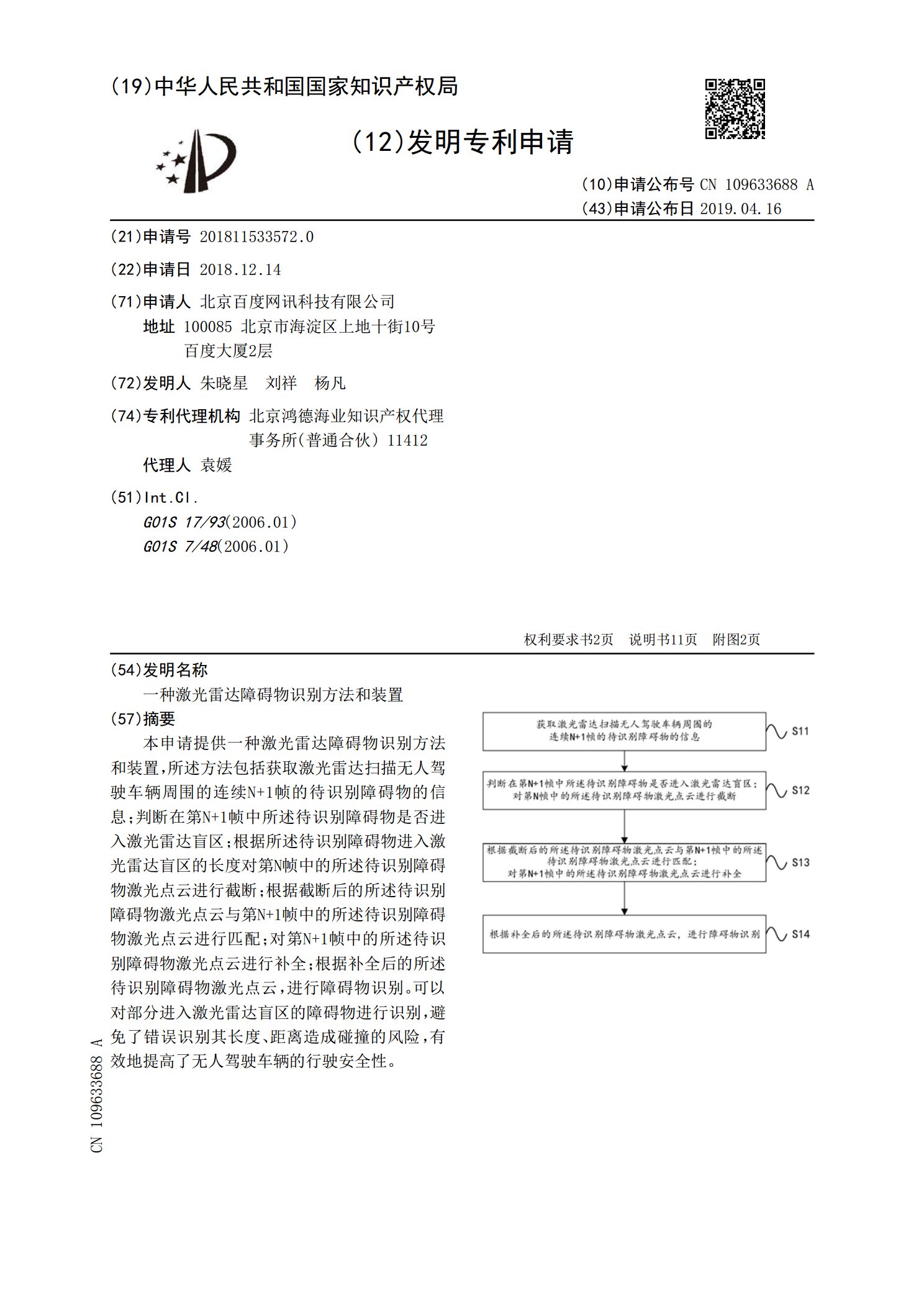
一种激光雷达障碍物识别方法和装置.pdf
本申请提供一种激光雷达障碍物识别方法和装置,所述方法包括获取激光雷达扫描无人驾驶车辆周围的连续N+1帧的待识别障碍物的信息;判断在第N+1帧中所述待识别障碍物是否进入激光雷达盲区;根据所述待识别障碍物进入激光雷达盲区的长度对第N帧中的所述待识别障碍物激光点云进行截断;根据截断后的所述待识别障碍物激光点云与第N+1帧中的所述待识别障碍物激光点云进行匹配;对第N+1帧中的所述待识别障碍物激光点云进行补全;根据补全后的所述待识别障碍物激光点云,进行障碍物识别。可以对部分进入激光雷达盲区的障碍物进行识别,避免了错
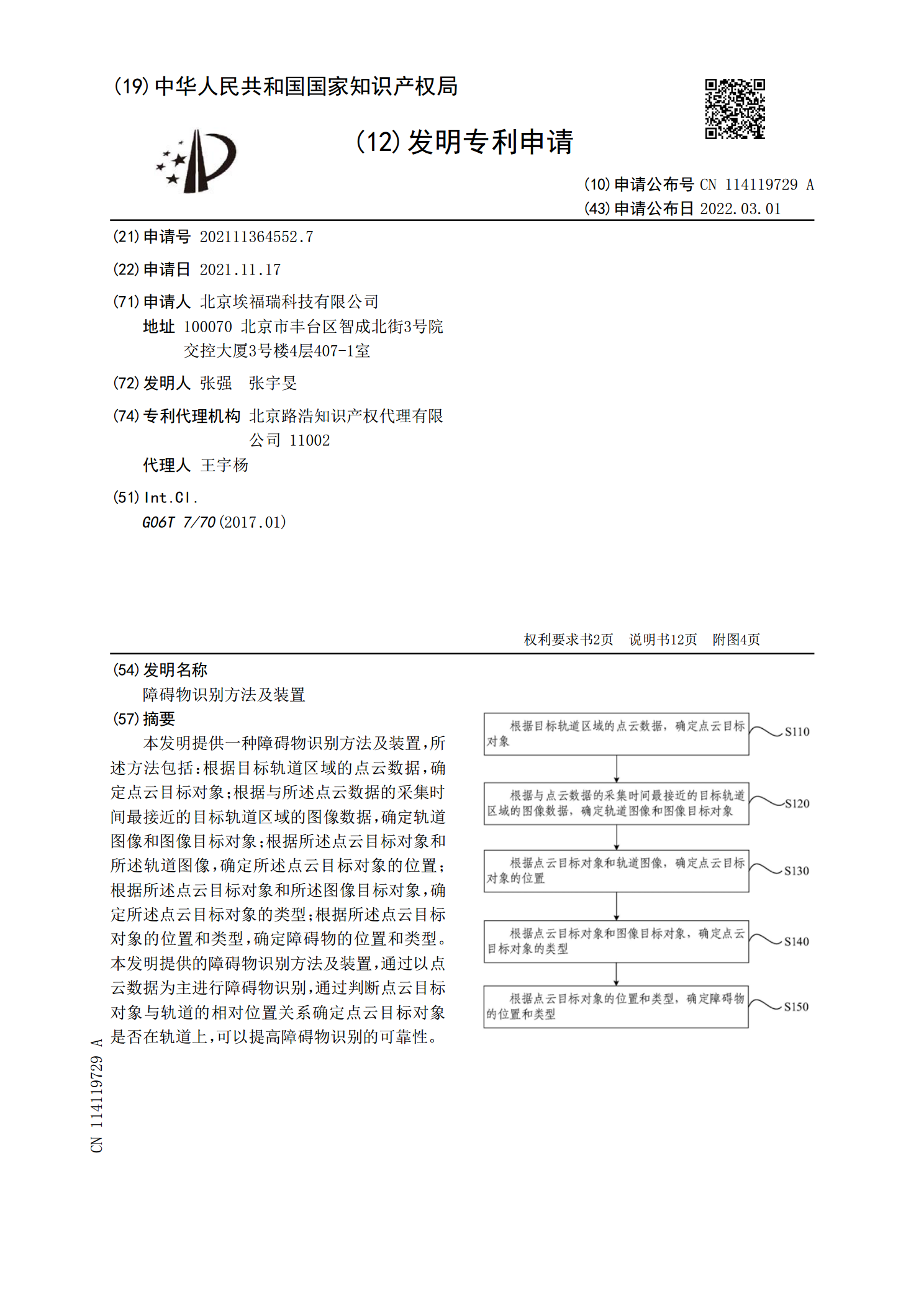
障碍物识别方法及装置.pdf
本发明提供一种障碍物识别方法及装置,所述方法包括:根据目标轨道区域的点云数据,确定点云目标对象;根据与所述点云数据的采集时间最接近的目标轨道区域的图像数据,确定轨道图像和图像目标对象;根据所述点云目标对象和所述轨道图像,确定所述点云目标对象的位置;根据所述点云目标对象和所述图像目标对象,确定所述点云目标对象的类型;根据所述点云目标对象的位置和类型,确定障碍物的位置和类型。本发明提供的障碍物识别方法及装置,通过以点云数据为主进行障碍物识别,通过判断点云目标对象与轨道的相对位置关系确定点云目标对象是否在轨道上
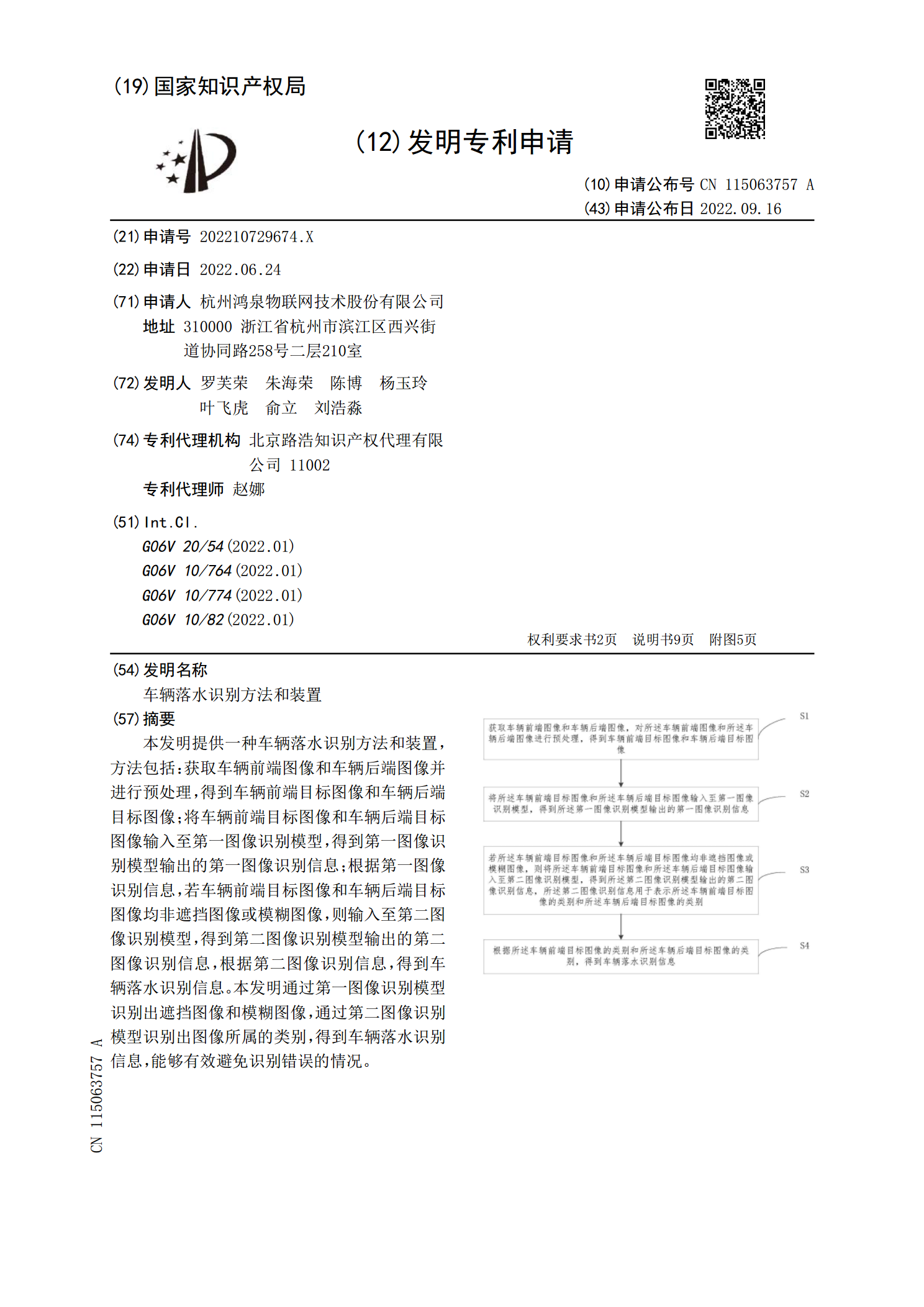
车辆落水识别方法和装置.pdf
本发明提供一种车辆落水识别方法和装置,方法包括:获取车辆前端图像和车辆后端图像并进行预处理,得到车辆前端目标图像和车辆后端目标图像;将车辆前端目标图像和车辆后端目标图像输入至第一图像识别模型,得到第一图像识别模型输出的第一图像识别信息;根据第一图像识别信息,若车辆前端目标图像和车辆后端目标图像均非遮挡图像或模糊图像,则输入至第二图像识别模型,得到第二图像识别模型输出的第二图像识别信息,根据第二图像识别信息,得到车辆落水识别信息。本发明通过第一图像识别模型识别出遮挡图像和模糊图像,通过第二图像识别模型识别出