
障碍物检测方法、基于障碍物的导航方法、装置和机器人.pdf

玉军****la

1/10

2/10
3/10

4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共22页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
障碍物检测方法、基于障碍物的导航方法、装置和机器人.pdf
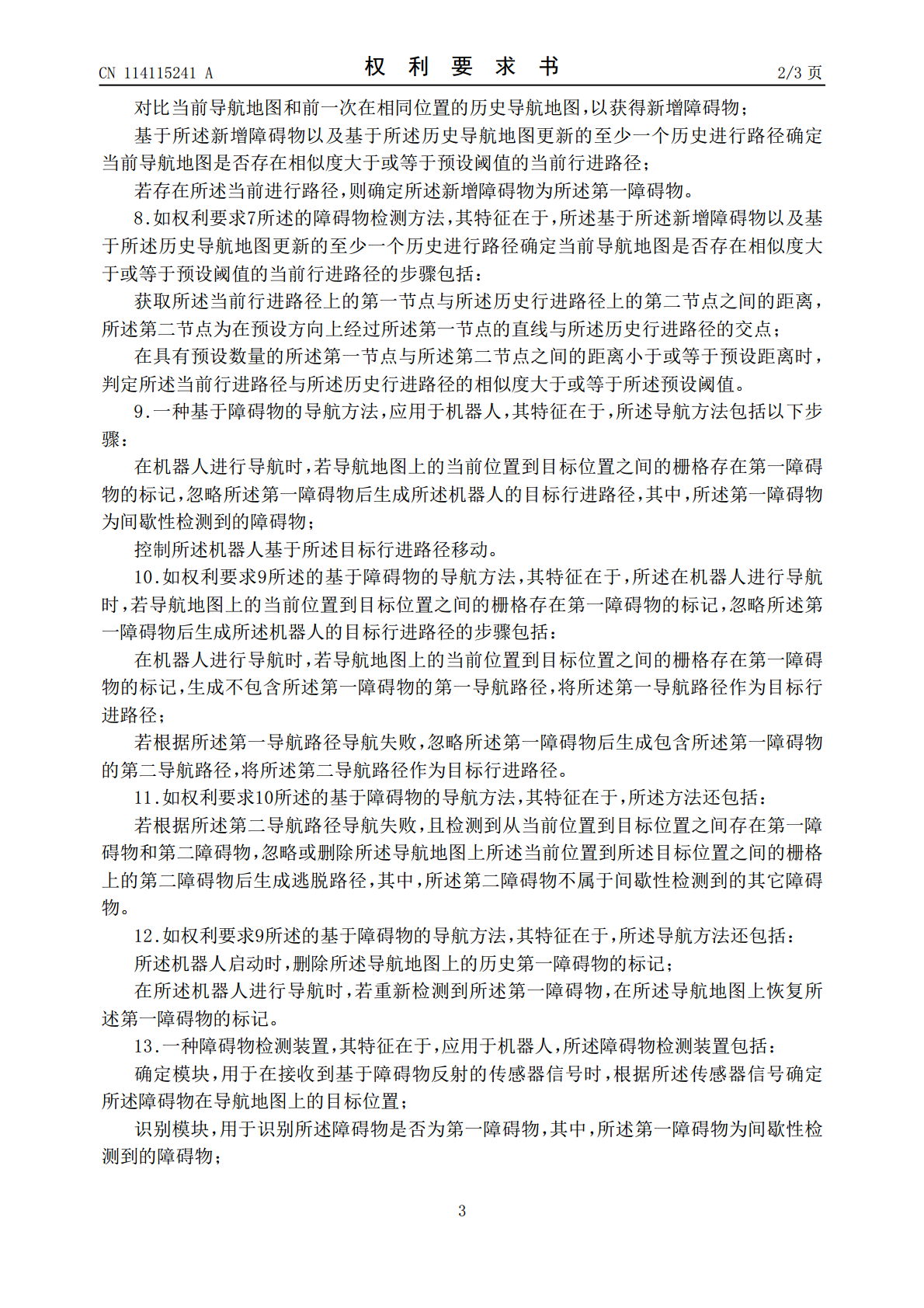
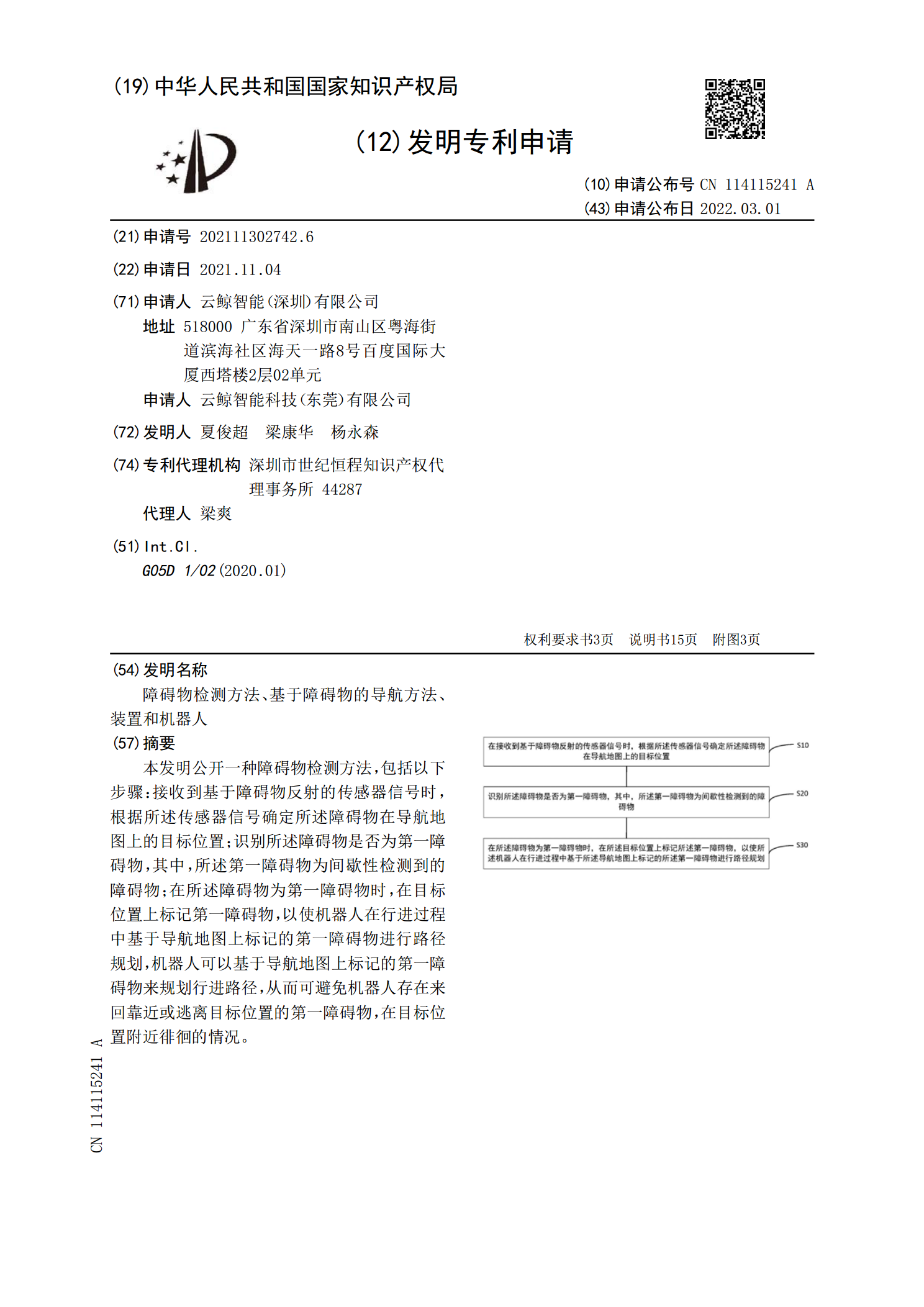
本发明公开一种障碍物检测方法,包括以下步骤:接收到基于障碍物反射的传感器信号时,根据所述传感器信号确定所述障碍物在导航地图上的目标位置;识别所述障碍物是否为第一障碍物,其中,所述第一障碍物为间歇性检测到的障碍物;在所述障碍物为第一障碍物时,在目标位置上标记第一障碍物,以使机器人在行进过程中基于导航地图上标记的第一障碍物进行路径规划,机器人可以基于导航地图上标记的第一障碍物来规划行进路径,从而可避免机器人存在来回靠近或逃离目标位置的第一障碍物,在目标位置附近徘徊的情况。
障碍物检测方法及装置.pdf
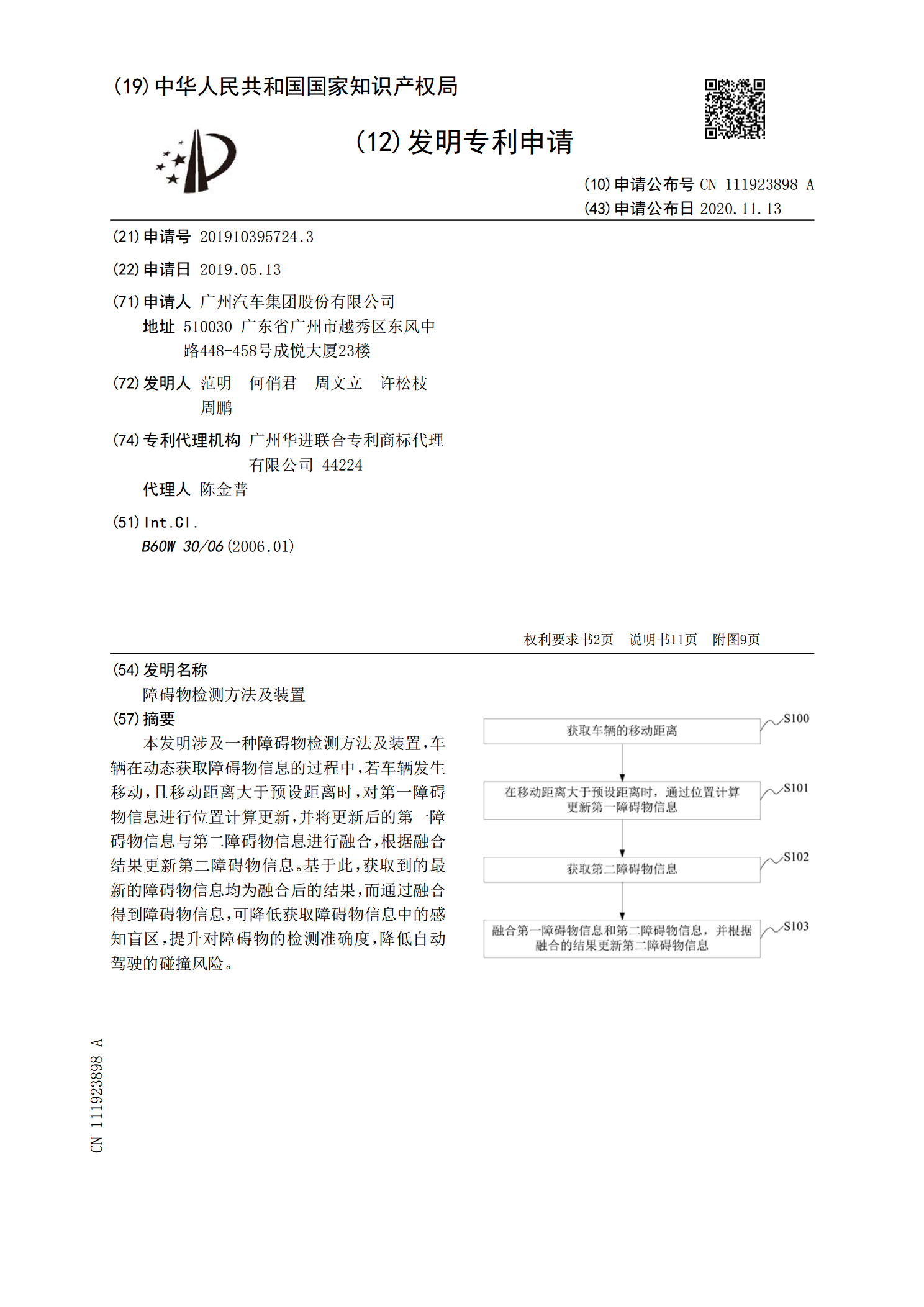
本发明涉及一种障碍物检测方法及装置,车辆在动态获取障碍物信息的过程中,若车辆发生移动,且移动距离大于预设距离时,对第一障碍物信息进行位置计算更新,并将更新后的第一障碍物信息与第二障碍物信息进行融合,根据融合结果更新第二障碍物信息。基于此,获取到的最新的障碍物信息均为融合后的结果,而通过融合得到障碍物信息,可降低获取障碍物信息中的感知盲区,提升对障碍物的检测准确度,降低自动驾驶的碰撞风险。
障碍物检测方法及装置.pdf
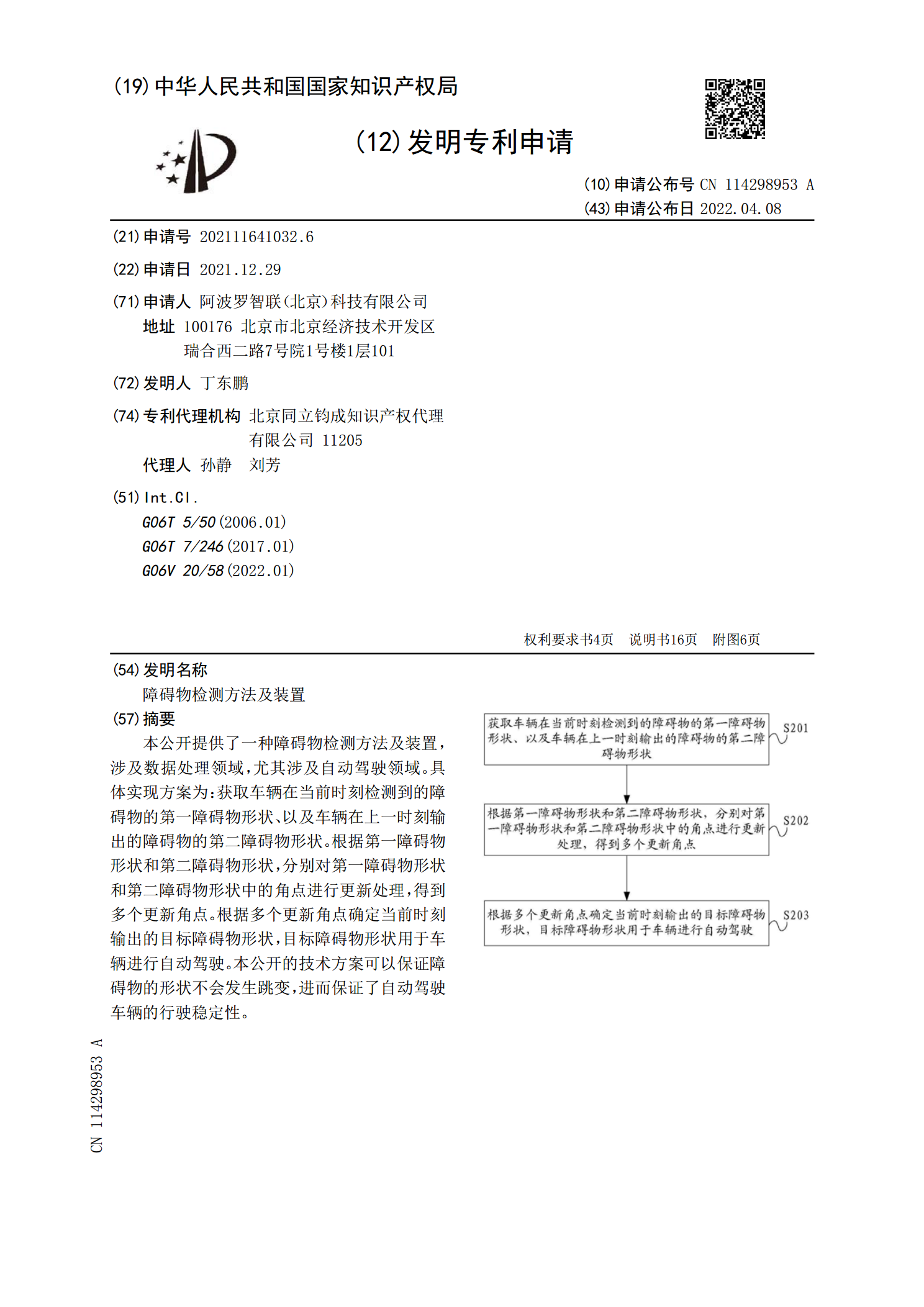
本公开提供了一种障碍物检测方法及装置,涉及数据处理领域,尤其涉及自动驾驶领域。具体实现方案为:获取车辆在当前时刻检测到的障碍物的第一障碍物形状、以及车辆在上一时刻输出的障碍物的第二障碍物形状。根据第一障碍物形状和第二障碍物形状,分别对第一障碍物形状和第二障碍物形状中的角点进行更新处理,得到多个更新角点。根据多个更新角点确定当前时刻输出的目标障碍物形状,目标障碍物形状用于车辆进行自动驾驶。本公开的技术方案可以保证障碍物的形状不会发生跳变,进而保证了自动驾驶车辆的行驶稳定性。

障碍物检测方法及装置.pdf
一种障碍物检测方法及装置,涉及通信技术领域,为了解决现有技术中存在的障碍物检测的精度较低以及对复杂环境的适应性较弱的问题。障碍物检测方法包括:获取待检测图像(101);根据待检测图像中包含的像素信息,确定待检测图像中的路面区域和非路面区域(102);分别确定路面区域的最外层轮廓线和非路面区域的轮廓线;当存在至少一个非路面区域的轮廓线位于路面区域的最外层轮廓线包含的区域内时(103),将所述至少一个非路面区域包含的实物确定为障碍物(104)。该方法及装置应用在检测障碍物的过程中。
障碍物预警方法和障碍物预警装置.pdf
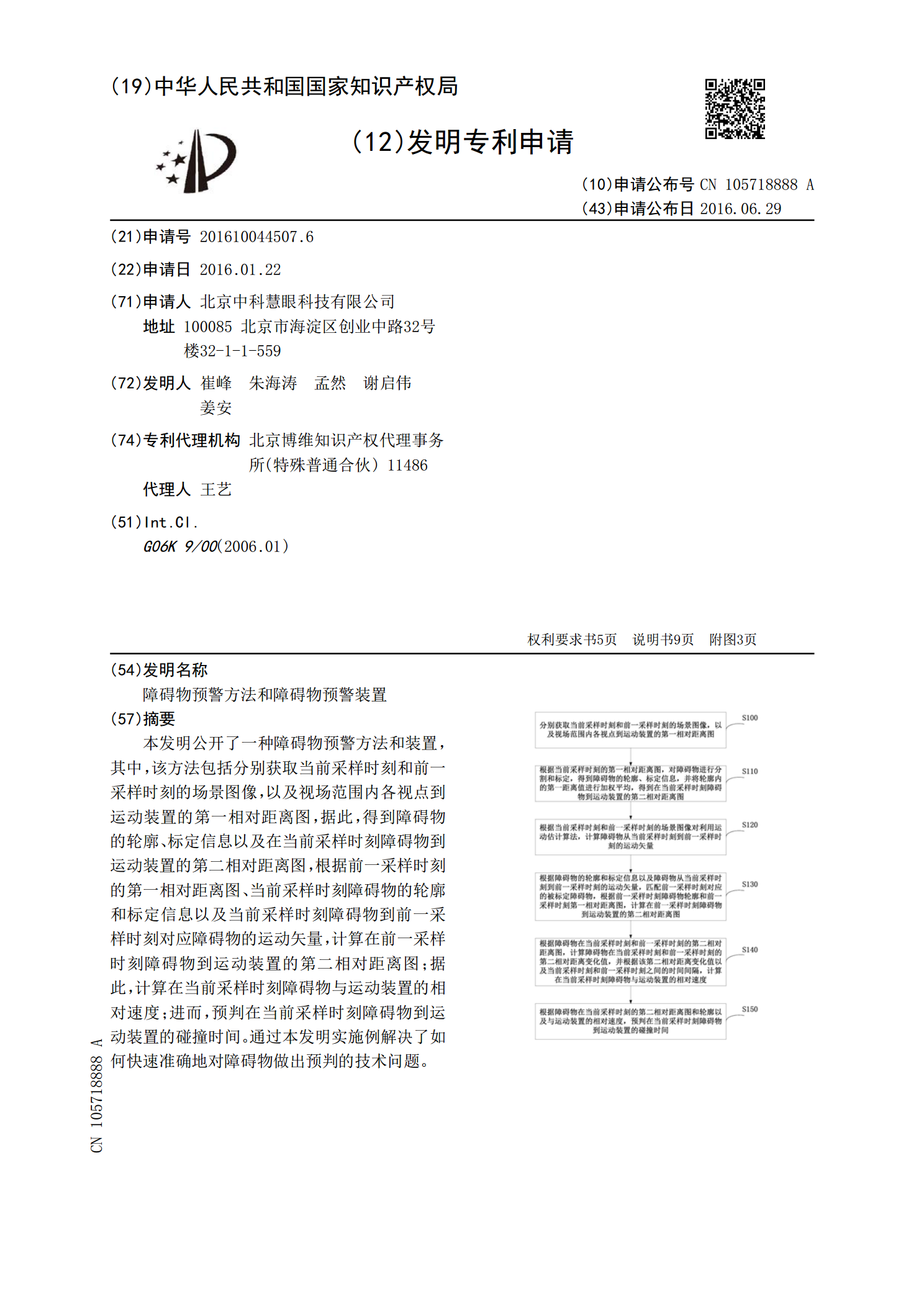
本发明公开了一种障碍物预警方法和装置,其中,该方法包括分别获取当前采样时刻和前一采样时刻的场景图像,以及视场范围内各视点到运动装置的第一相对距离图,据此,得到障碍物的轮廓、标定信息以及在当前采样时刻障碍物到运动装置的第二相对距离图,根据前一采样时刻的第一相对距离图、当前采样时刻障碍物的轮廓和标定信息以及当前采样时刻障碍物到前一采样时刻对应障碍物的运动矢量,计算在前一采样时刻障碍物到运动装置的第二相对距离图;据此,计算在当前采样时刻障碍物与运动装置的相对速度;进而,预判在当前采样时刻障碍物到运动装置的碰撞时