
车厢载货体积的测量方法及装置、设备、存储介质.pdf

景福****90

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

车厢载货体积的测量方法及装置、设备、存储介质.pdf
本发明公开了一种车厢载货体积的测量方法及装置、设备、存储介质,方法包括:当接收到测量指令时,控制设置在车厢内的激光雷达扫描车厢,获得当前点云数据,根据初始化参数将当前点云数据转换为第一坐标集,根据预设系数对第一坐标集中各个三维坐标进行取整转换,然后剔除重复的三维坐标,获得第二坐标集,然后针对第二坐标集中x轴坐标值相同、y轴坐标值相同的三维坐标,只保留z轴坐标值最大的目标三维坐标,获得目标坐标集,最后根据预设系数和目标坐标集,计算获得当前的车厢载货体积,从而可以提高车厢载货体积的计算效率。
车厢载货体积的测量方法及装置.pdf
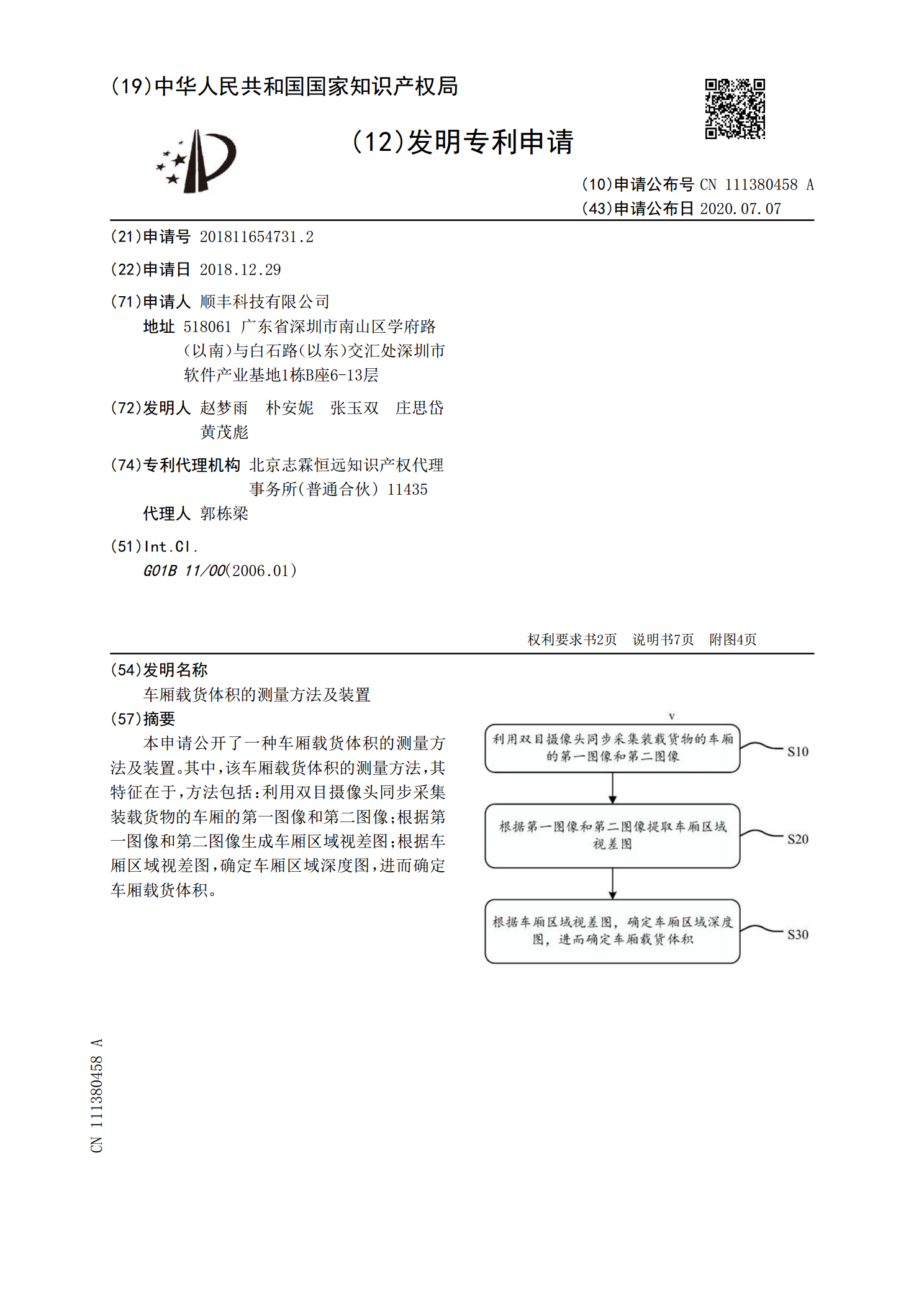
本申请公开了一种车厢载货体积的测量方法及装置。其中,该车厢载货体积的测量方法,其特征在于,方法包括:利用双目摄像头同步采集装载货物的车厢的第一图像和第二图像;根据第一图像和第二图像生成车厢区域视差图;根据车厢区域视差图,确定车厢区域深度图,进而确定车厢载货体积。
车厢内货物体积的确定方法、装置、电子设备及存储介质.pdf
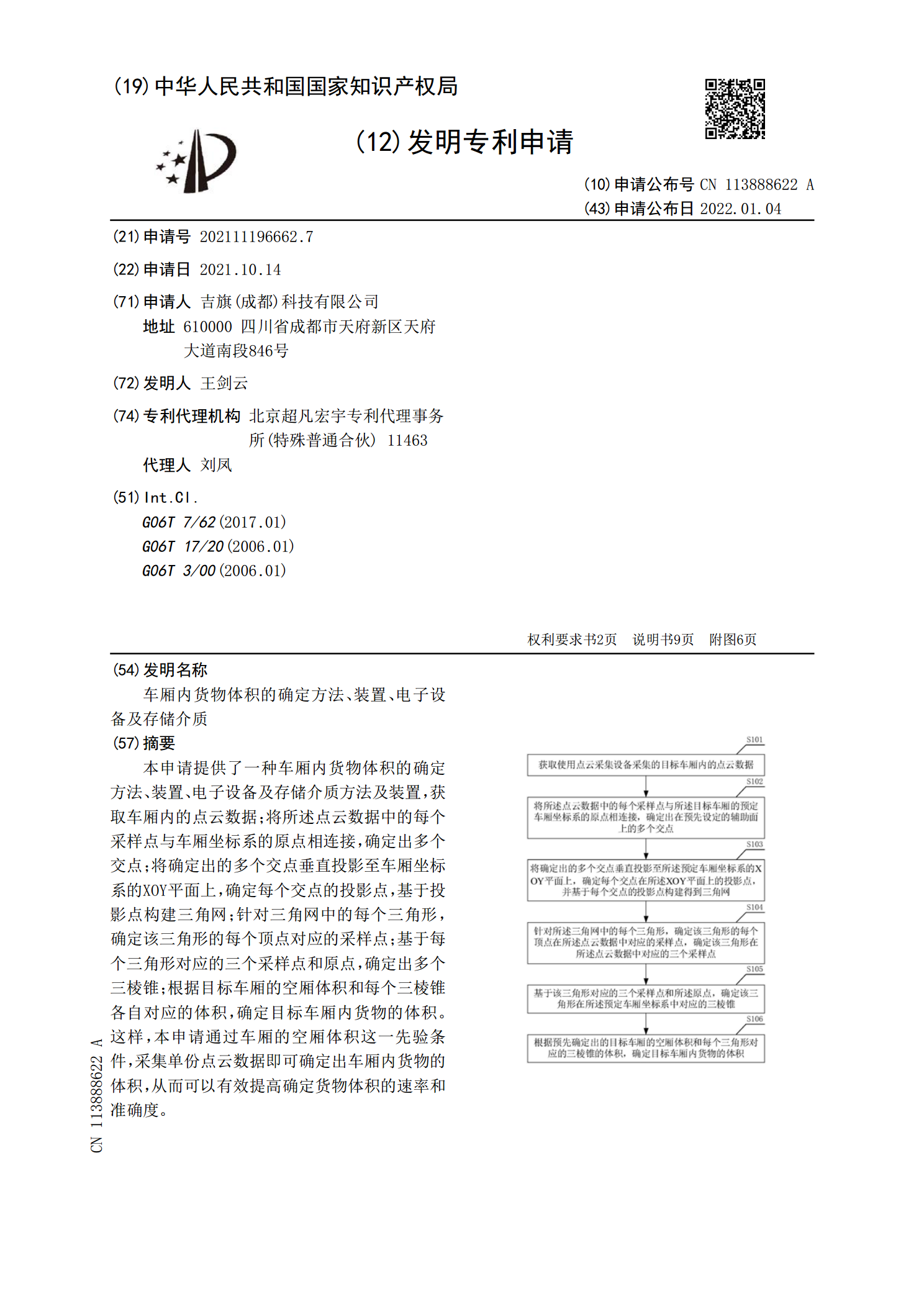
本申请提供了一种车厢内货物体积的确定方法、装置、电子设备及存储介质方法及装置,获取车厢内的点云数据;将所述点云数据中的每个采样点与车厢坐标系的原点相连接,确定出多个交点;将确定出的多个交点垂直投影至车厢坐标系的XOY平面上,确定每个交点的投影点,基于投影点构建三角网;针对三角网中的每个三角形,确定该三角形的每个顶点对应的采样点;基于每个三角形对应的三个采样点和原点,确定出多个三棱锥;根据目标车厢的空厢体积和每个三棱锥各自对应的体积,确定目标车厢内货物的体积。这样,本申请通过车厢的空厢体积这一先验条件,采集
基于双目视觉的体积测量方法、装置及存储介质.pdf
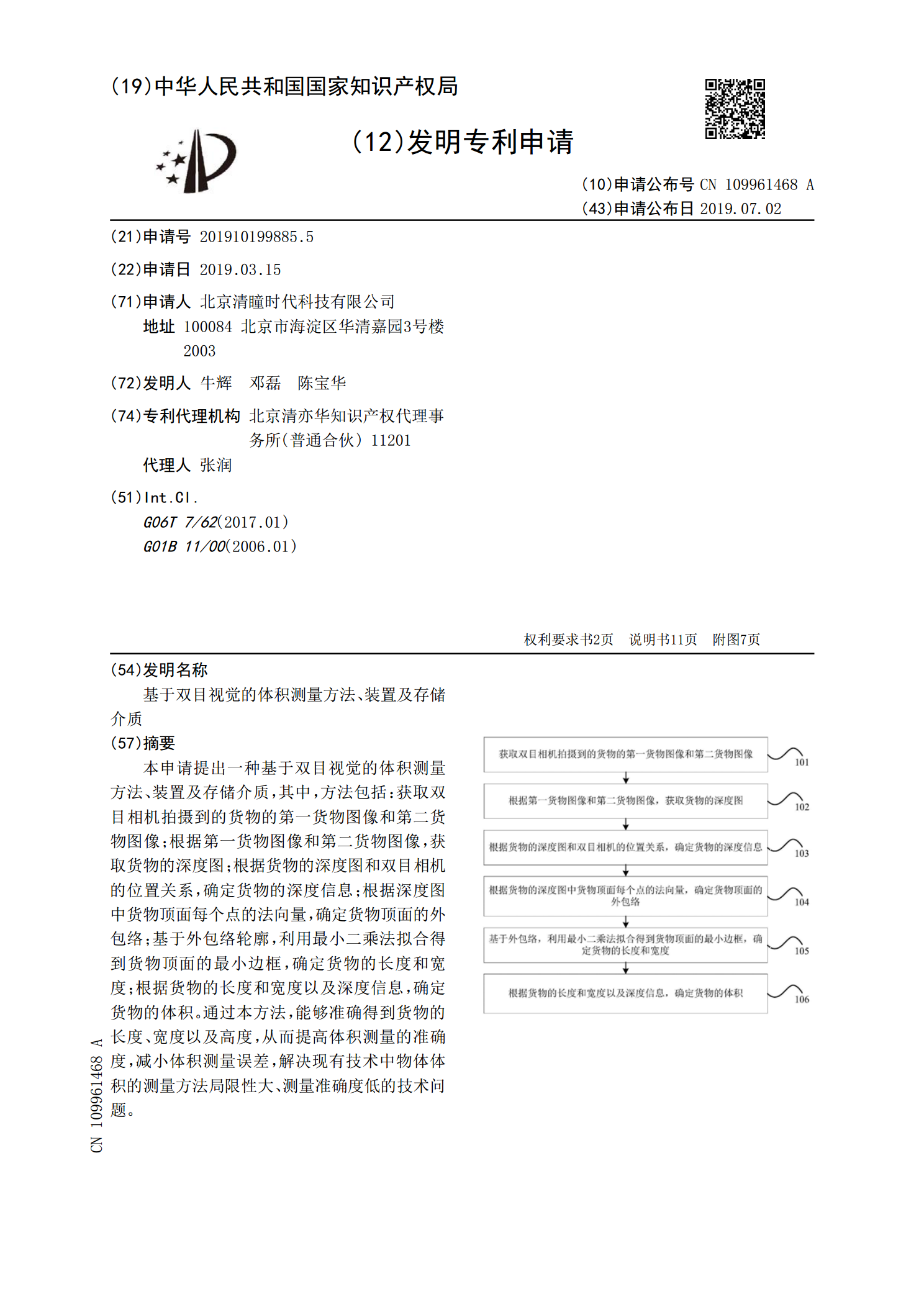
本申请提出一种基于双目视觉的体积测量方法、装置及存储介质,其中,方法包括:获取双目相机拍摄到的货物的第一货物图像和第二货物图像;根据第一货物图像和第二货物图像,获取货物的深度图;根据货物的深度图和双目相机的位置关系,确定货物的深度信息;根据深度图中货物顶面每个点的法向量,确定货物顶面的外包络;基于外包络轮廓,利用最小二乘法拟合得到货物顶面的最小边框,确定货物的长度和宽度;根据货物的长度和宽度以及深度信息,确定货物的体积。通过本方法,能够准确得到货物的长度、宽度以及高度,从而提高体积测量的准确度,减小体积测
握力测量方法、装置、设备及存储介质.pdf
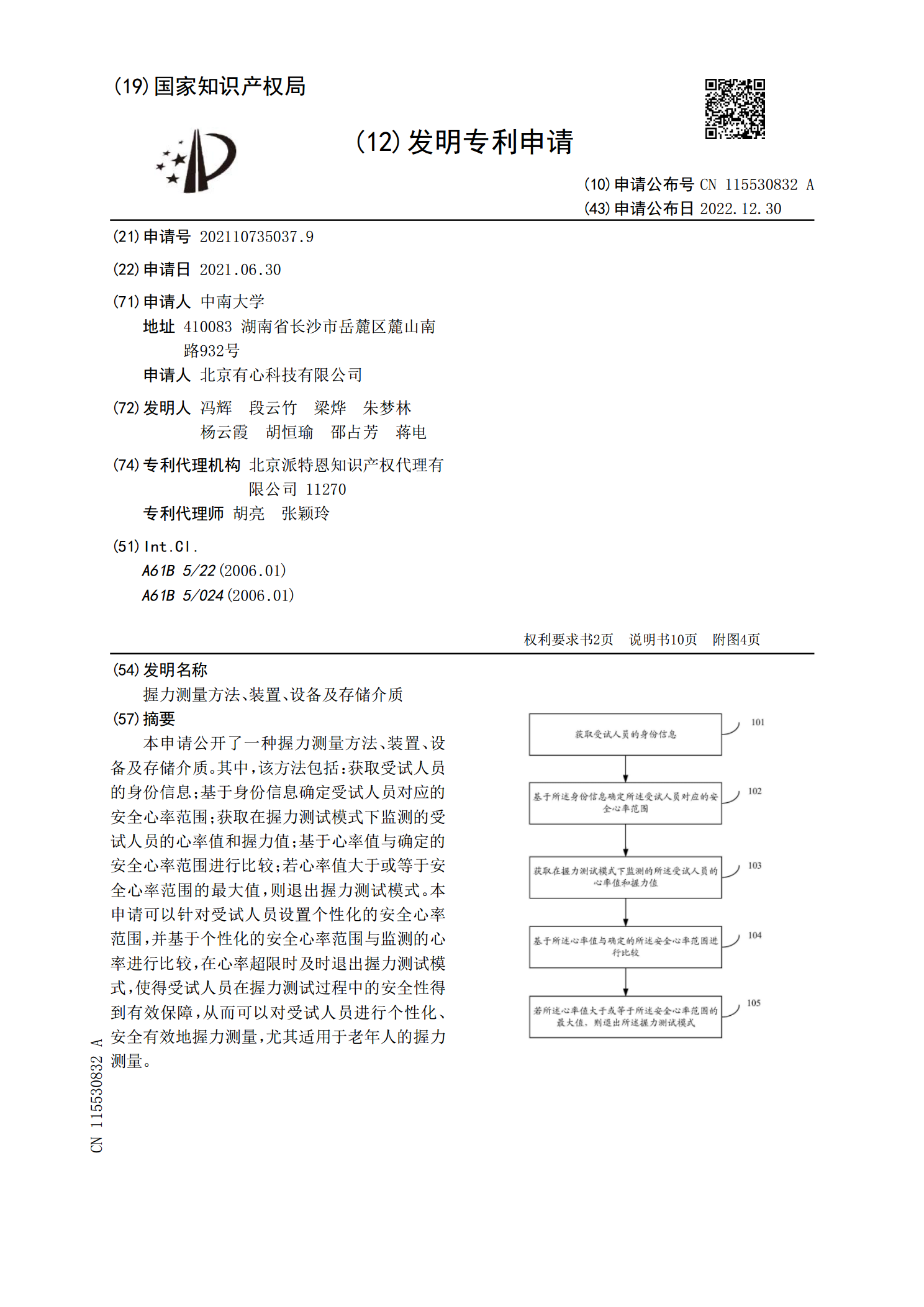
本申请公开了一种握力测量方法、装置、设备及存储介质。其中,该方法包括:获取受试人员的身份信息;基于身份信息确定受试人员对应的安全心率范围;获取在握力测试模式下监测的受试人员的心率值和握力值;基于心率值与确定的安全心率范围进行比较;若心率值大于或等于安全心率范围的最大值,则退出握力测试模式。本申请可以针对受试人员设置个性化的安全心率范围,并基于个性化的安全心率范围与监测的心率进行比较,在心率超限时及时退出握力测试模式,使得受试人员在握力测试过程中的安全性得到有效保障,从而可以对受试人员进行个性化、安全有效地