
柔性电路基板及其制造方法.pdf

星菱****23

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共19页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
柔性电路基板及其制造方法.pdf
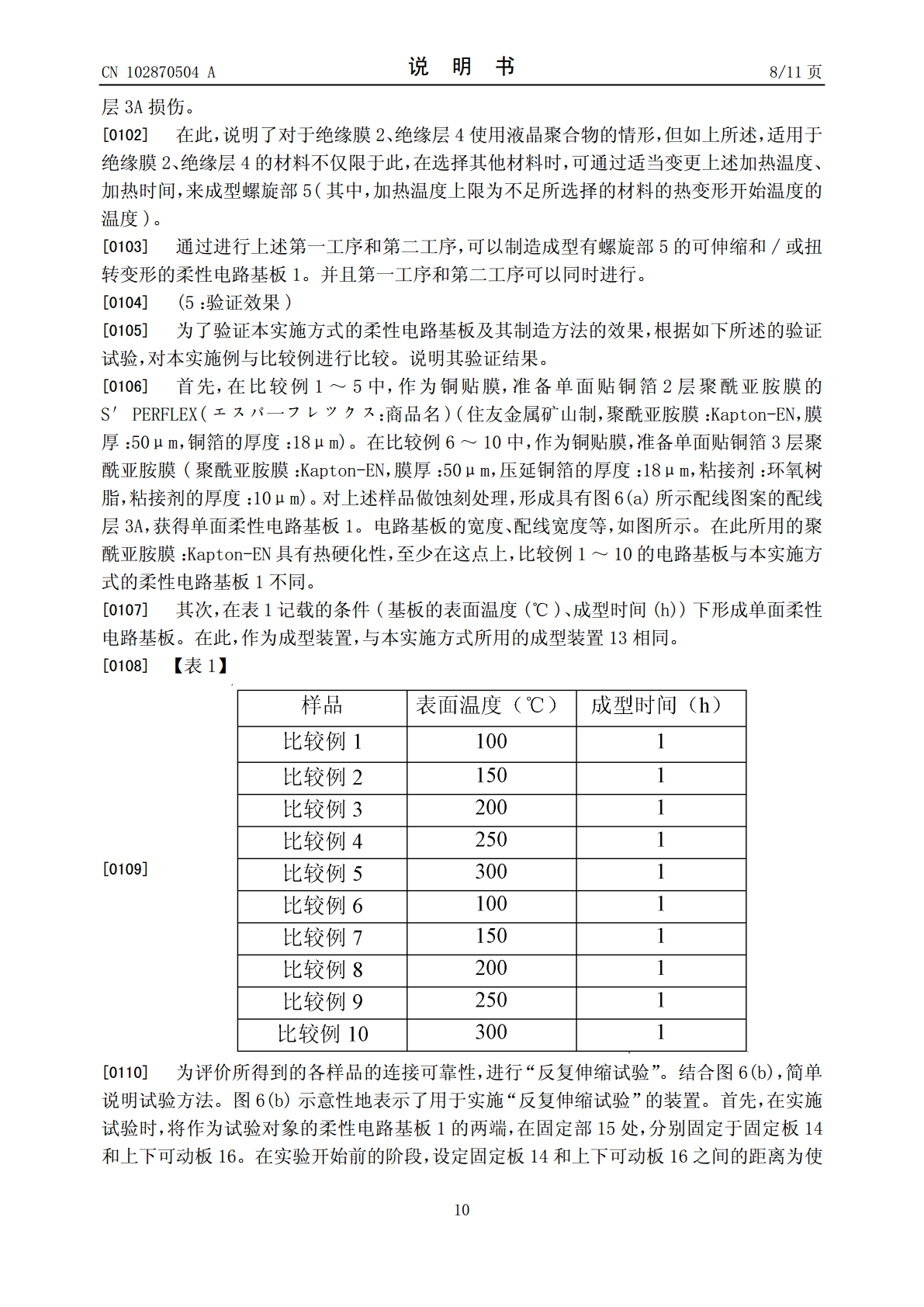
本发明提供一种柔性电路基板及其制造方法,该柔性电路基板结构简单,可在机器人的可动部等要求可伸缩的配线的情形下,使配线伸缩和/或扭转变形,且轻量化、小型化优异,并在反复变形时不易引起配线层的断线、剥离。其特征在于,柔性电路基板1具有由液晶聚合物形成的绝缘膜(2);形成于绝缘膜(2)上的配线层3A和形成于配线层(3A)上的,由液晶聚合物形成的绝缘层(4),在至少一部分上形成有螺旋状的螺旋部(5),螺旋部(5)可伸缩和/或扭转变形。
柔性电路基板及其制造方法.pdf
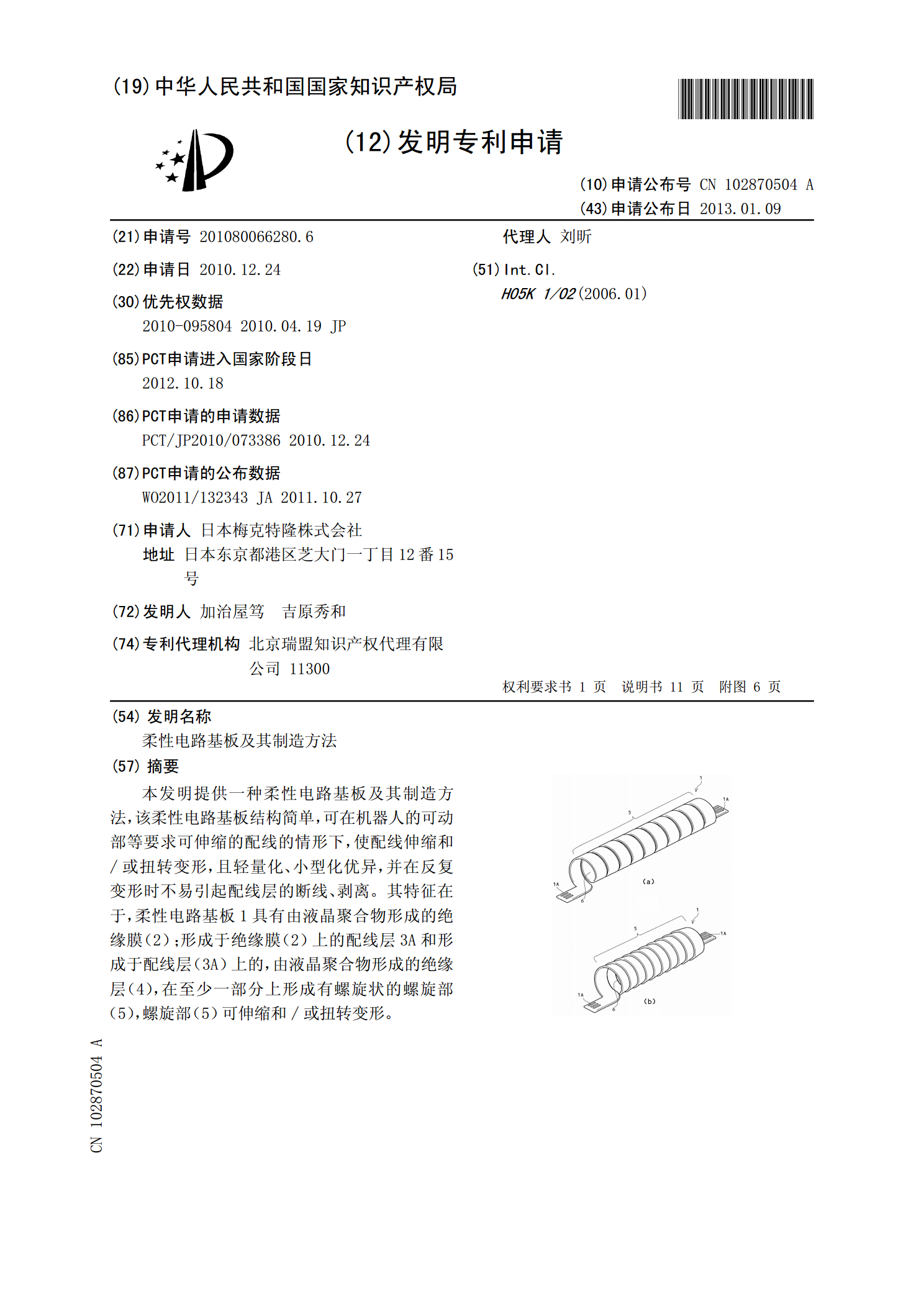
提供一种形成弯折部的柔性电路基板,其可以柔软地变形,并且反复变性时,从电子部件放热的情况系,或者形成细微布线的情况下,不发生布线层的剥离、断裂,具有较高的连接可靠性的柔性电路基板机器制造方法。柔性电路基板1的特征在于,具有液晶聚合物形成的绝缘膜2、在绝缘膜2上形成的布线层3,和布线层3上形成的液晶聚合物形成的绝缘层4,形成至少一处具有曲率半径R(mm)的弯折部1A,保持弯折部1A的曲率半径R(mm)的状态下可以变形的结构。
柔性电路基板以及柔性电路基板的制造方法.pdf
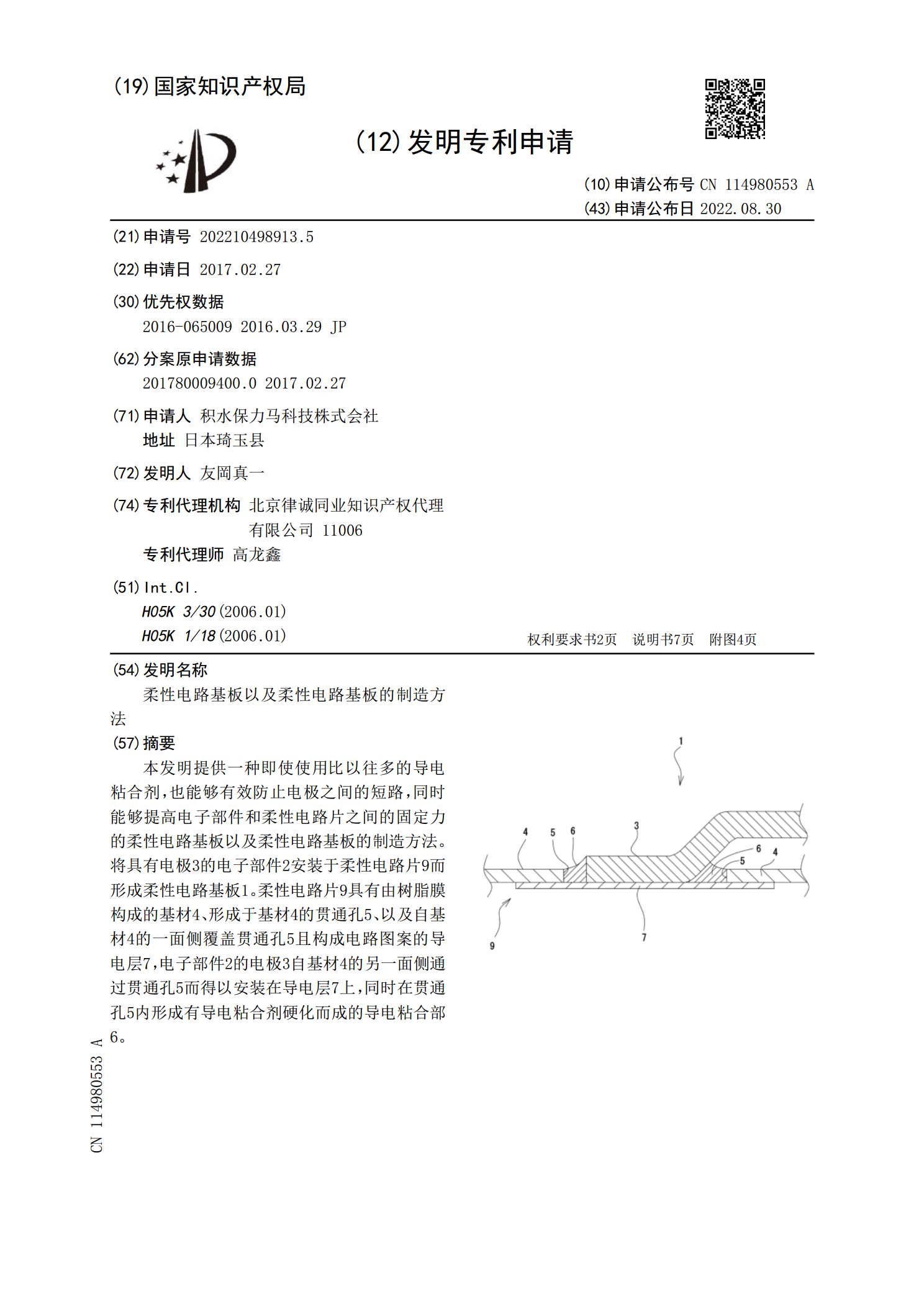
本发明提供一种即使使用比以往多的导电粘合剂,也能够有效防止电极之间的短路,同时能够提高电子部件和柔性电路片之间的固定力的柔性电路基板以及柔性电路基板的制造方法。将具有电极3的电子部件2安装于柔性电路片9而形成柔性电路基板1。柔性电路片9具有由树脂膜构成的基材4、形成于基材4的贯通孔5、以及自基材4的一面侧覆盖贯通孔5且构成电路图案的导电层7,电子部件2的电极3自基材4的另一面侧通过贯通孔5而得以安装在导电层7上,同时在贯通孔5内形成有导电粘合剂硬化而成的导电粘合部6。
带加强板的柔性印刷电路基板及其制造方法.pdf
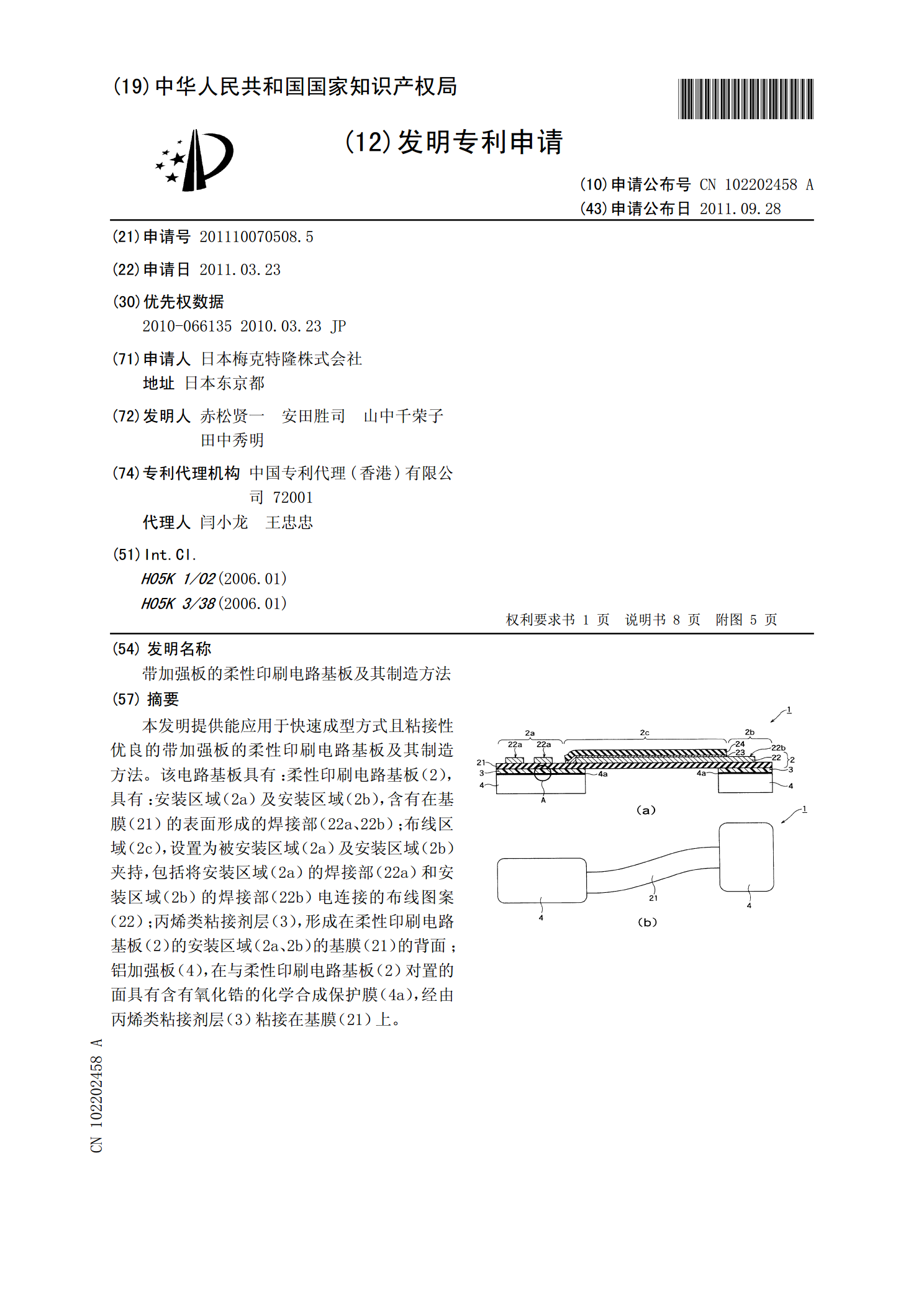
本发明提供能应用于快速成型方式且粘接性优良的带加强板的柔性印刷电路基板及其制造方法。该电路基板具有:柔性印刷电路基板(2),具有:安装区域(2a)及安装区域(2b),含有在基膜(21)的表面形成的焊接部(22a、22b);布线区域(2c),设置为被安装区域(2a)及安装区域(2b)夹持,包括将安装区域(2a)的焊接部(22a)和安装区域(2b)的焊接部(22b)电连接的布线图案(22);丙烯类粘接剂层(3),形成在柔性印刷电路基板(2)的安装区域(2a、2b)的基膜(21)的背面;铝加强板(4),在与柔性

柔性基板的制造方法及柔性基板的冲压装置.pdf
本发明提供了一种可容易地筛选不合格品的柔性基板制造方法。上述柔性基板制造方法包括以下步骤:控制部(30)使第一冲模(32a)工作,从柔性带(1)冲压出第一轮廓;控制部(30)判断第一轮廓的冲压精度是否符合标准;控制部(30)在判断出第一轮廓的冲压精度符合标准时使第二冲模(34)工作,从而从柔性带(1)冲压出剩余的轮廓,并使柔性基板(10)从柔性带(1)分离,当控制部(30)判断出第一轮廓的冲压精度不符合标准时,不从柔性带(1)冲压出剩余的轮廓而使柔性基板(10)保持在与柔性带(1)连接的状态