
一种工业运载机器人.pdf

甲申****66


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种工业运载机器人.pdf
本发明涉及一种工业机器人,更具体的说是一种工业运载机器人,包括运载组件、中座组件、支撑组件和移动控制组件,本发明可以通过移动控制组件实现移动和转向,并且可以通过运载组件来运送货物,当货物送到需要码放时,运载组件还可以升高方便货物码放,同时运载组件上的托物板还可以倾斜,便于卸货。所述运载组件滑动连接在中座组件上,支撑组件转动连接在中座组件的下端,移动控制组件铰接连接在中座组件上。

一种工业运载机器人.pdf
本发明涉及运载机器人,更具体的说是一种工业运载机器人,包括移动轨道、装置支架、运动机构、转动机构、转动支架、存储机构、阻挡机构、推料机构和卸料机构,可以将卸料机构放置在需要放料的工位上,运动机构驱动工业运载机器人在移动轨道上进行运动,工业运载机器人运动到工位侧时,运动机构停止运动,转动机构转动一个周期,转动机构带动转动支架转动一个周期,卸料机构对指定高度的存储机构进行阻挡,使得指定高度的存储机构停留在工位一侧,阻挡机构不再阻挡留在工位一侧的存储机构,推料机构启动将指定的物料推落在工位上。

一种适用于工业机器人的移动运载装置.pdf
一种适用于工业机器人的移动运载装置,包括车体、动力部、液压传动部、横向关节抓取部、竖向关节抓取部、伸缩底板、车轮组件,车轮组件安装在车体前后的两侧,竖向关节抓取部安装在车体的上部,横向关节抓取部安装在车体的前侧,伸缩底板安装在车体的底部的前侧,动力部和液压传动部相连接,液压传动部和横向关节抓取部、竖向关节抓取部相连接,动力部通过液压传动部驱动横向关节抓取部、竖向关节抓取部调整位置以抓取工业机器人的关节,伸缩底板伸出车体将工业机器人的底部支撑。本发明具有运载工业机器人省力、方便的优点,还具有减少工业机器人的

工业运载式机器人用激光导引仪的研究.docx
工业运载式机器人用激光导引仪的研究标题:工业运载式机器人用激光导引仪的研究摘要:随着工业自动化程度的提高,工业运载式机器人在生产领域发挥着越来越重要的作用。激光导引仪作为一种高精度定位和导引工具,被广泛应用于工业运载式机器人中。本文通过对激光导引仪在工业机器人中的研究,探讨了其工作原理,优势和应用情况,并对未来可能的改进和发展方向进行了展望。关键词:工业运载式机器人,激光导引仪,定位,导引,自动化引言:工业运载式机器人是推动工业生产自动化进程的重要组成部分。它们在大规模生产过程中承担着一系列任务,如搬运、
一种运载机器人的转向装置.pdf
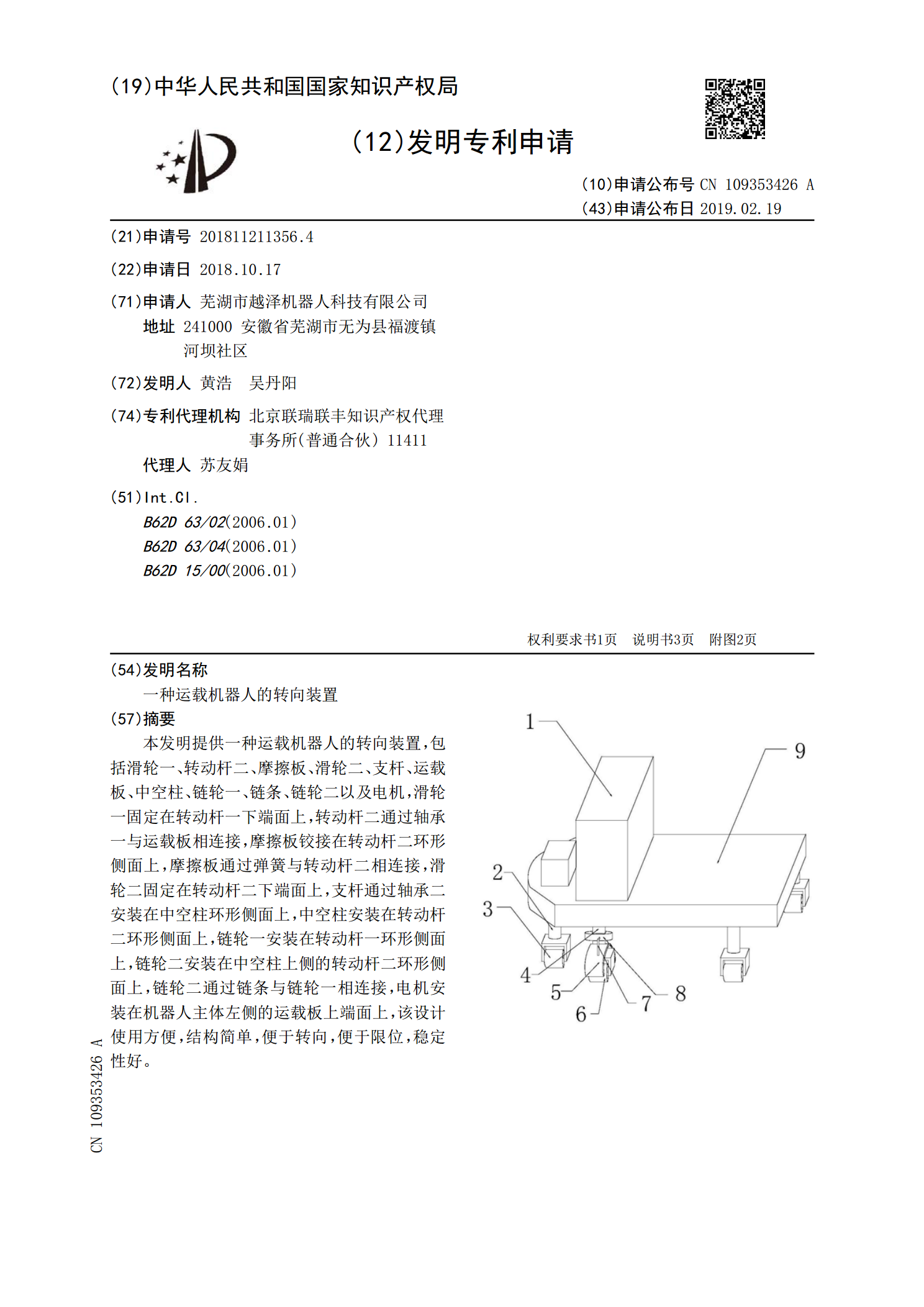
本发明提供一种运载机器人的转向装置,包括滑轮一、转动杆二、摩擦板、滑轮二、支杆、运载板、中空柱、链轮一、链条、链轮二以及电机,滑轮一固定在转动杆一下端面上,转动杆二通过轴承一与运载板相连接,摩擦板铰接在转动杆二环形侧面上,摩擦板通过弹簧与转动杆二相连接,滑轮二固定在转动杆二下端面上,支杆通过轴承二安装在中空柱环形侧面上,中空柱安装在转动杆二环形侧面上,链轮一安装在转动杆一环形侧面上,链轮二安装在中空柱上侧的转动杆二环形侧面上,链轮二通过链条与链轮一相连接,电机安装在机器人主体左侧的运载板上端面上,该设计使