
智能清洁机器人.pdf

一条****贺6

1/10
2/10
3/10

4/10
5/10

6/10
7/10

8/10
9/10

10/10
亲,该文档总共34页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
智能清洁机器人.pdf
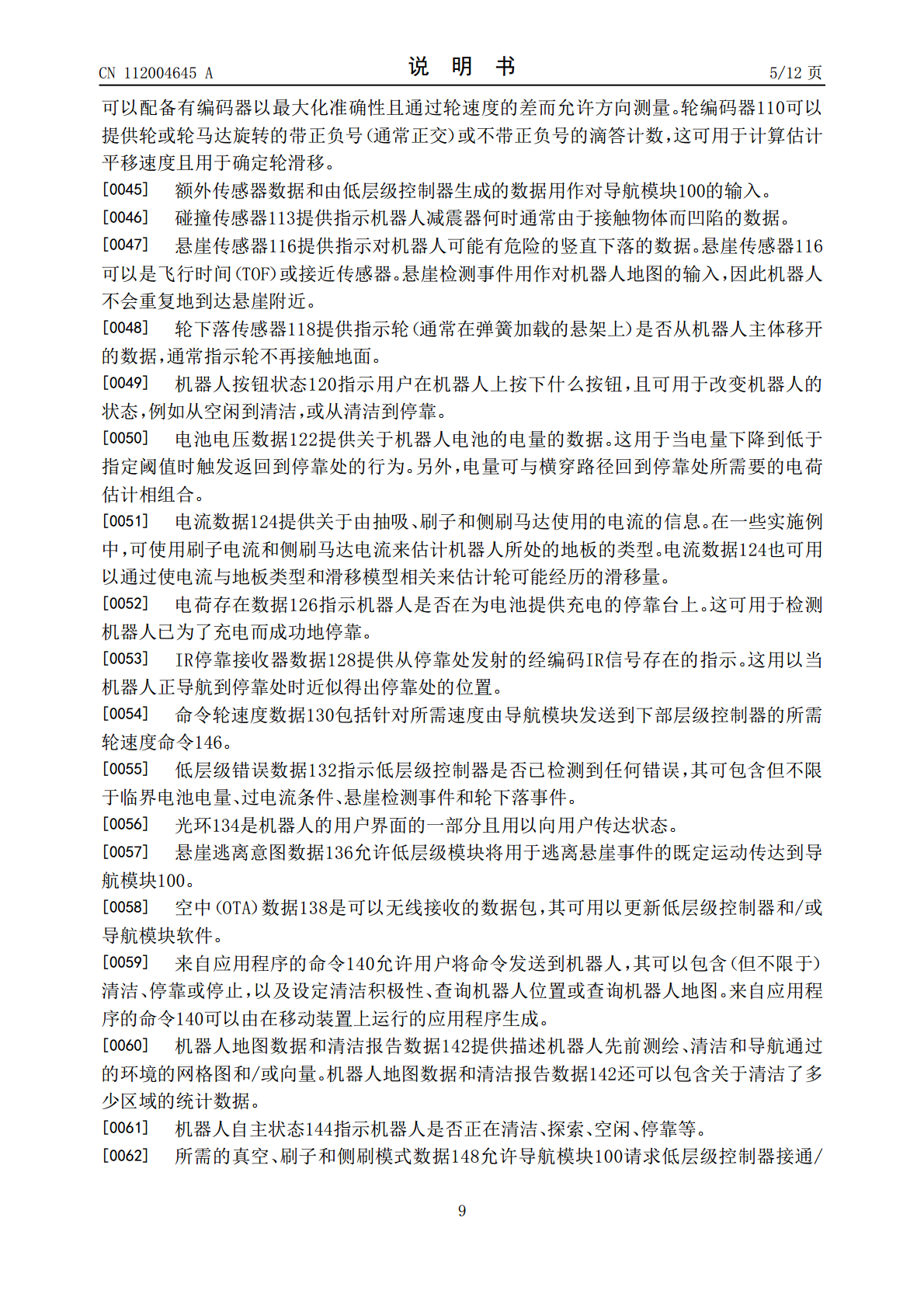
描述了一种智能自主室内清洁机器人,其能够在房屋中以智能方式自主地测绘和清洁多个房间。可以使用无源和有源传感器的各种组合来执行测绘、定位和障碍物避让。确切地说,所述机器人使用具有静态投影光图案的立体相机来生成3D数据。另外,所述机器人可以使用各种位置的光学传感器、激光ToF传感器、惯性测量单元和视觉里程测量来增强定位和测绘能力。
智能清洁机器人.pdf
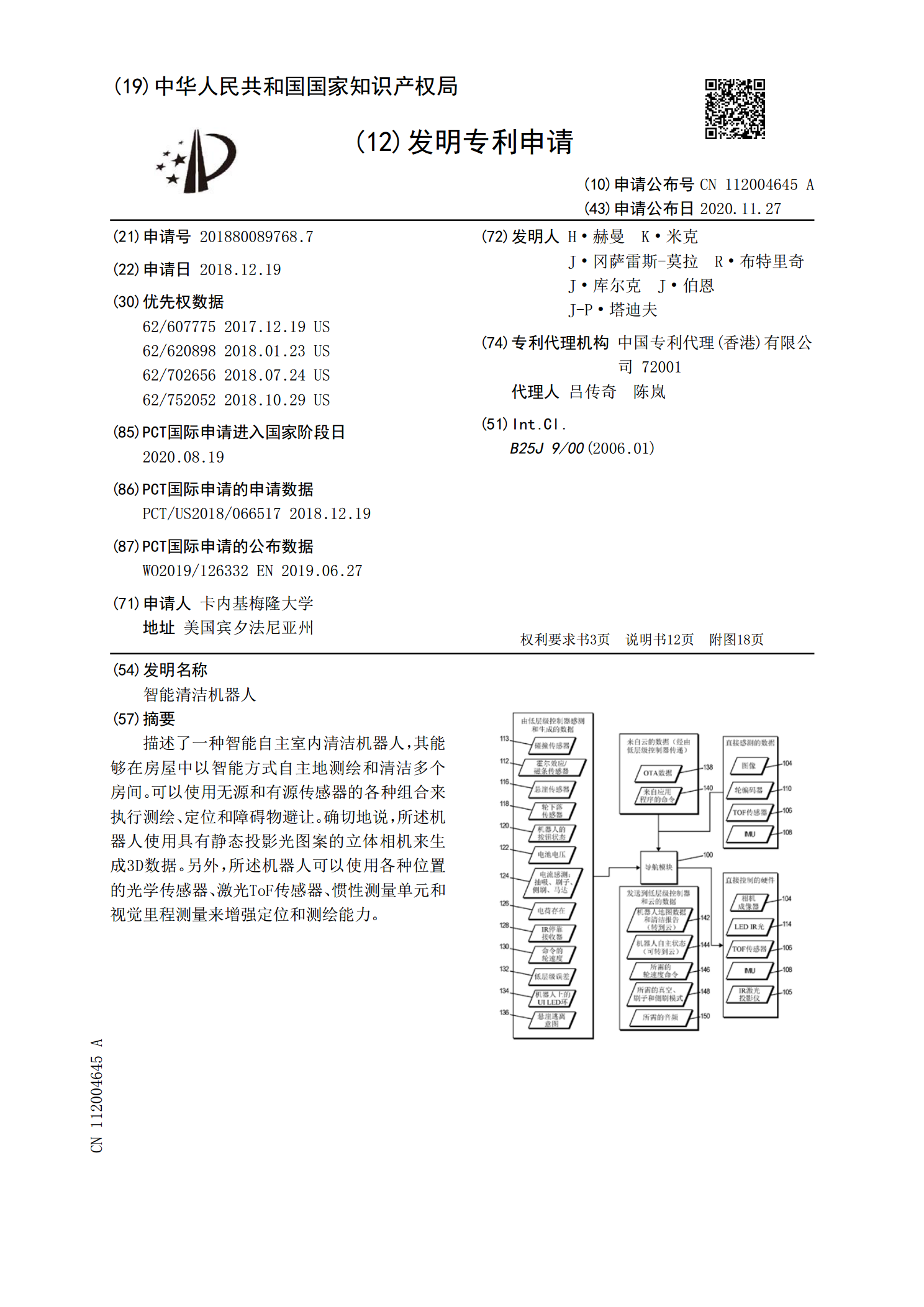
本发明提供一种智能清洁机器人,包括主机体;主机体为中空箱体结构,所述主机体底部设置有至少四个底轮,所述底轮与设置在所述主机体内部的转动电机的输出端连接;主机体内部设置有供电部件、电机控制部件及方向控制部件,所述供电部件与所述转动电机、电机控制部件及方向控制部件电连接;主机体的外侧壁上均匀设置有至少四个防撞部件,所述防撞部件包括水平设置的弹簧,所述弹簧一端与所述主机体的外侧壁连接,所述弹簧的另一端与橡胶块连接;主机体底部设置有圆形开口,所述圆形开口上方设置有吸尘部件。

一种智能清洁机器人.pdf
本发明公开了一种智能清洁机器人,其结构包括:机器人监测主机、支撑板、控制面板、控制盒、履带轮、防护板、清洁滚筒、连接杆、机械臂、旋转杆,机器人监测主机的下表面与控制盒的上表面右侧相贴合,本发明机器人监测主机由传动机构、启动装置、加料装置、定量喷水装置、拨料机构、旋转装置、密封装置组成,实现了能够通过控制该机器人上的机械臂旋转摆动,从而控制清洁滚筒能够上下移动的清洁所需区域,具有扩大清洁范围的作用,同时能够间歇地打开阀门,使管道内的水能够定量的喷洒到滚筒上进行清洁,避免喷洒水过多,造成对水资源的浪费,另外在

全自动智能家用清洁机器人.pdf
一种全自动智能家用清洁机器人,包括外壳,垃圾收集处理装置,拖地机构;所述外壳为圆形,所述垃圾收集处理装置、拖地机构分别相向固定在外壳上部两端,外壳底部位于垃圾收集处理装置下方固定万向轮,外壳底部位于垃圾收集处理装置与拖地机构之间下方对称设置滚轮,所述滚轮分别与驱动电机连接,所述滚轮、万向轮呈三角形分布;本发明清洁机器人体积小,运动灵活,使用方便,适合家庭使用,集垃圾收集、吸尘、拖地功能与一体。
一种智能清洁机器人.pdf
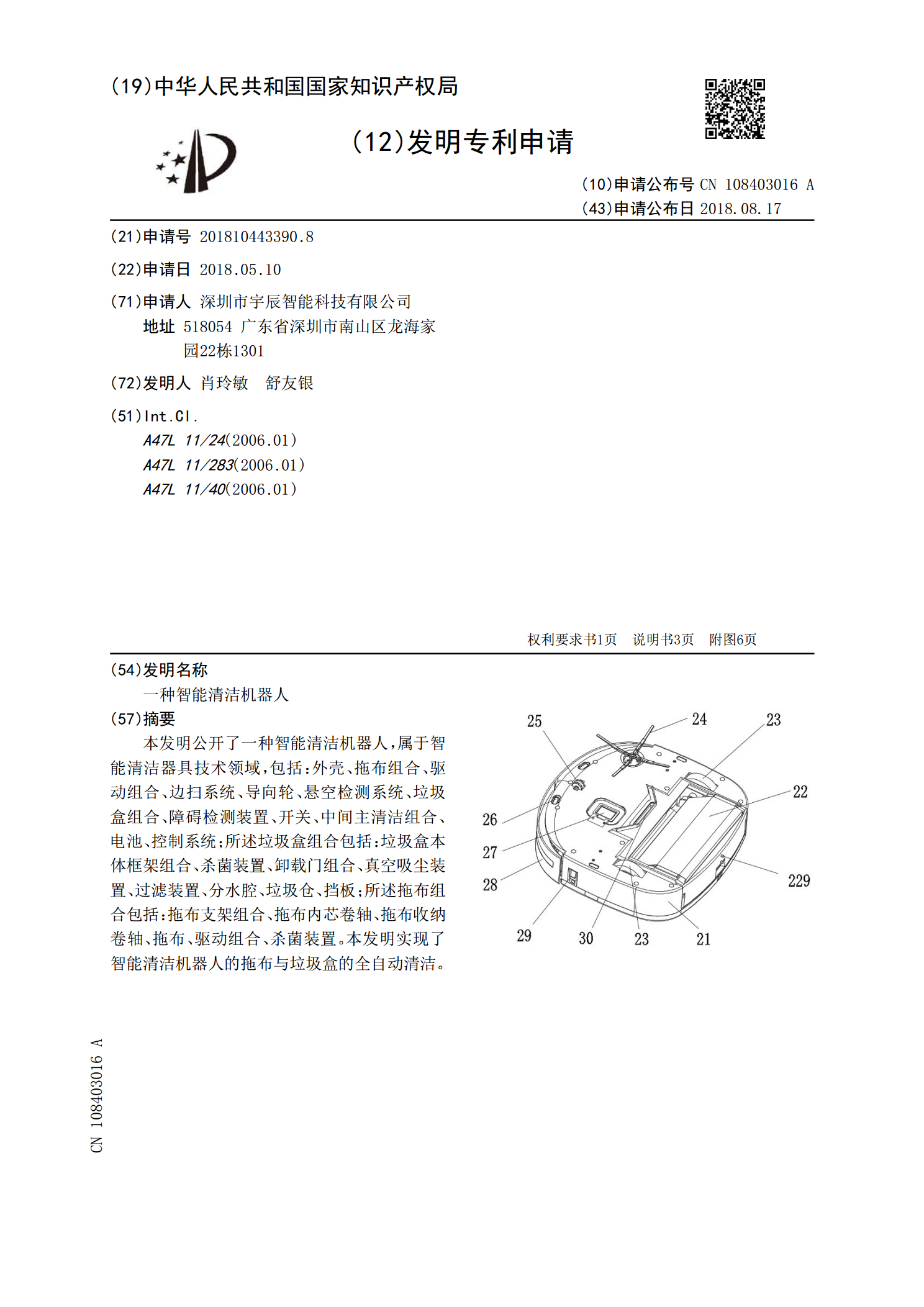
本发明公开了一种智能清洁机器人,属于智能清洁器具技术领域,包括:外壳、拖布组合、驱动组合、边扫系统、导向轮、悬空检测系统、垃圾盒组合、障碍检测装置、开关、中间主清洁组合、电池、控制系统;所述垃圾盒组合包括:垃圾盒本体框架组合、杀菌装置、卸载门组合、真空吸尘装置、过滤装置、分水腔、垃圾仓、挡板;所述拖布组合包括:拖布支架组合、拖布内芯卷轴、拖布收纳卷轴、拖布、驱动组合、杀菌装置。本发明实现了智能清洁机器人的拖布与垃圾盒的全自动清洁。