
一种基于车轮检测的车辆防碰撞方法.pdf

小凌****甜蜜


1/10

2/10

3/10

4/10

5/10
6/10

7/10
8/10

9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种基于车轮检测的车辆防碰撞方法.pdf
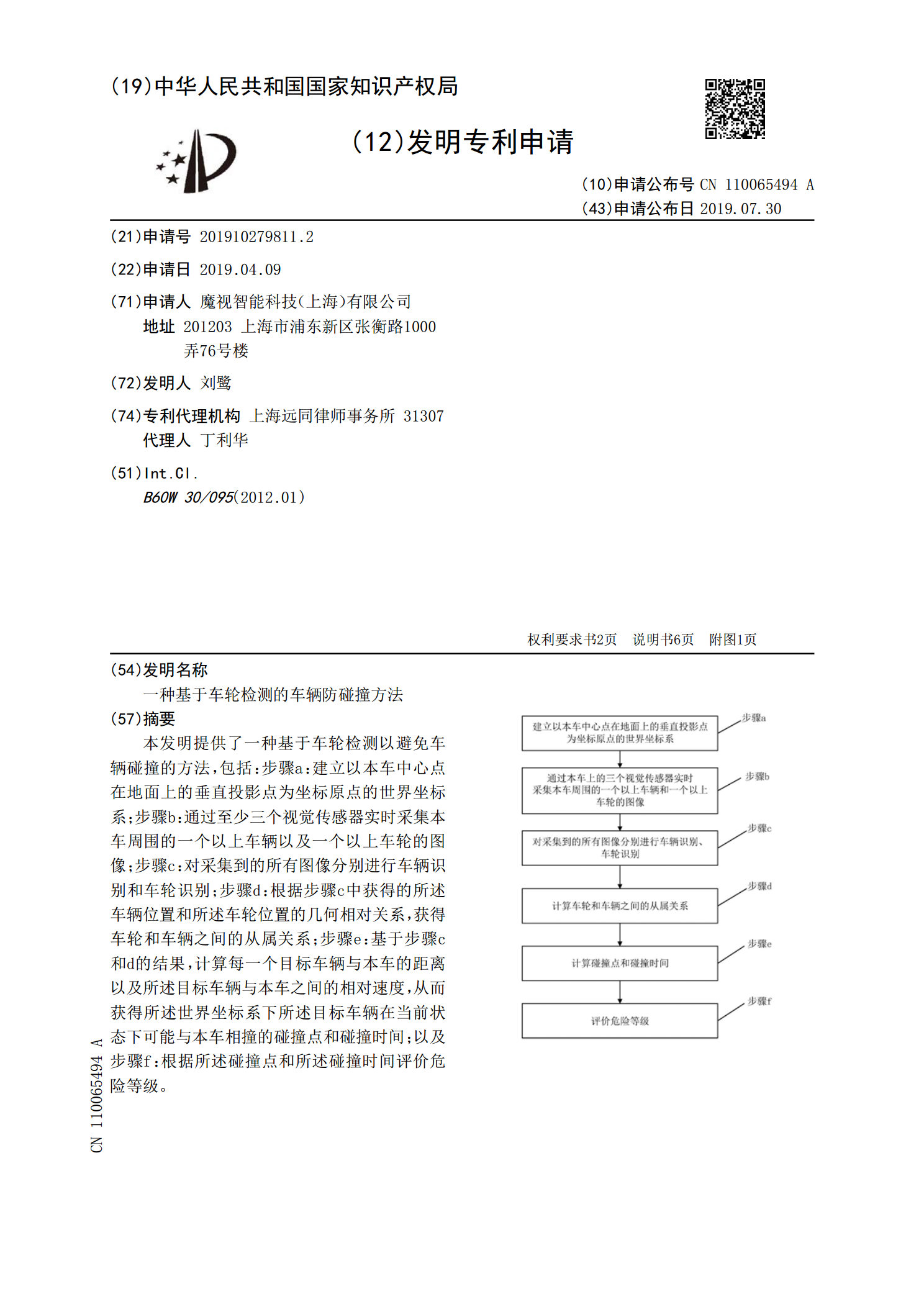
本发明提供了一种基于车轮检测以避免车辆碰撞的方法,包括:步骤a:建立以本车中心点在地面上的垂直投影点为坐标原点的世界坐标系;步骤b:通过至少三个视觉传感器实时采集本车周围的一个以上车辆以及一个以上车轮的图像;步骤c:对采集到的所有图像分别进行车辆识别和车轮识别;步骤d:根据步骤c中获得的所述车辆位置和所述车轮位置的几何相对关系,获得车轮和车辆之间的从属关系;步骤e:基于步骤c和d的结果,计算每一个目标车辆与本车的距离以及所述目标车辆与本车之间的相对速度,从而获得所述世界坐标系下所述目标车辆在当前状态下可能
车辆防碰撞系统、车辆及其防碰撞方法.pdf
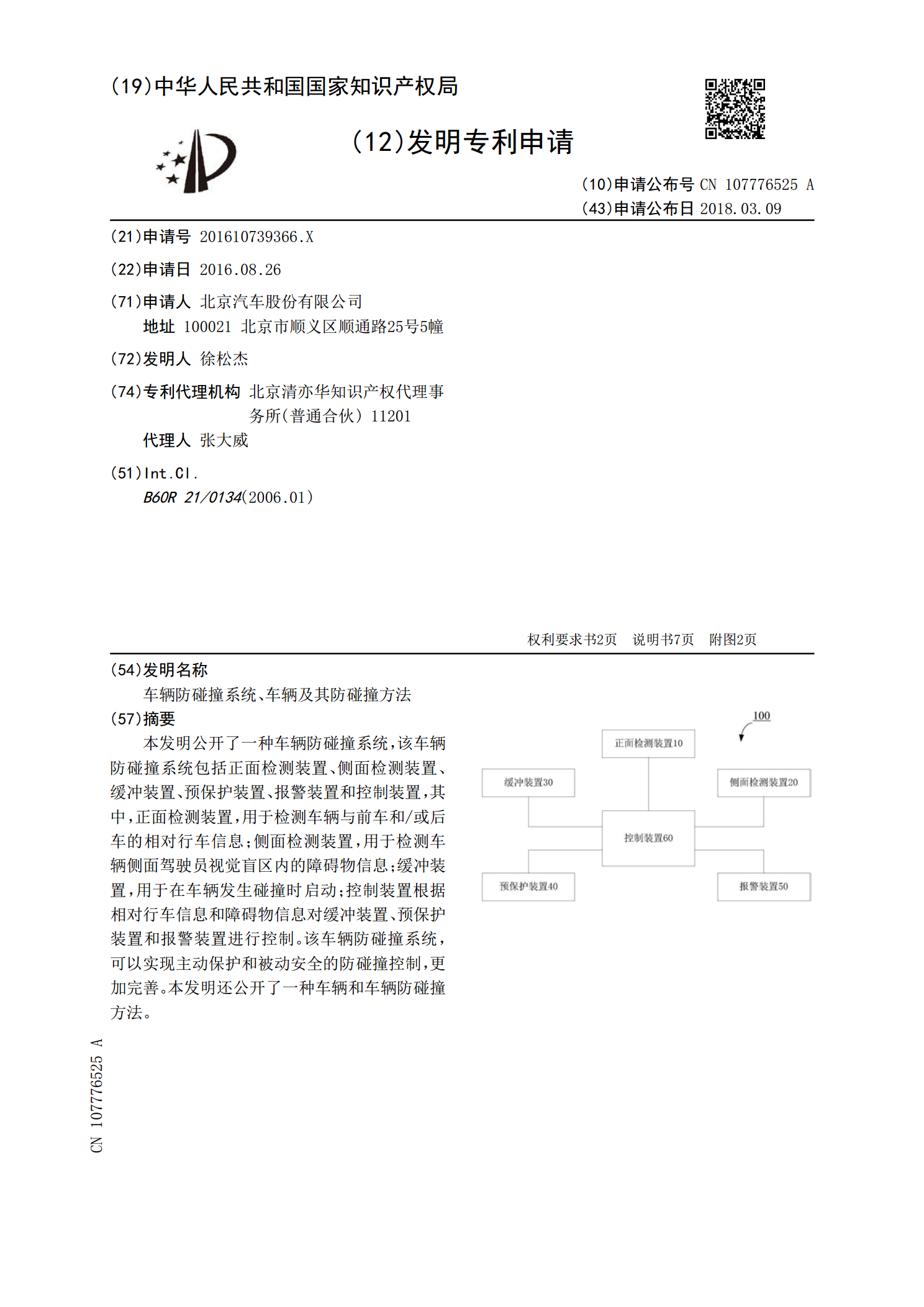
本发明公开了一种车辆防碰撞系统,该车辆防碰撞系统包括正面检测装置、侧面检测装置、缓冲装置、预保护装置、报警装置和控制装置,其中,正面检测装置,用于检测车辆与前车和/或后车的相对行车信息;侧面检测装置,用于检测车辆侧面驾驶员视觉盲区内的障碍物信息;缓冲装置,用于在车辆发生碰撞时启动;控制装置根据相对行车信息和障碍物信息对缓冲装置、预保护装置和报警装置进行控制。该车辆防碰撞系统,可以实现主动保护和被动安全的防碰撞控制,更加完善。本发明还公开了一种车辆和车辆防碰撞方法。
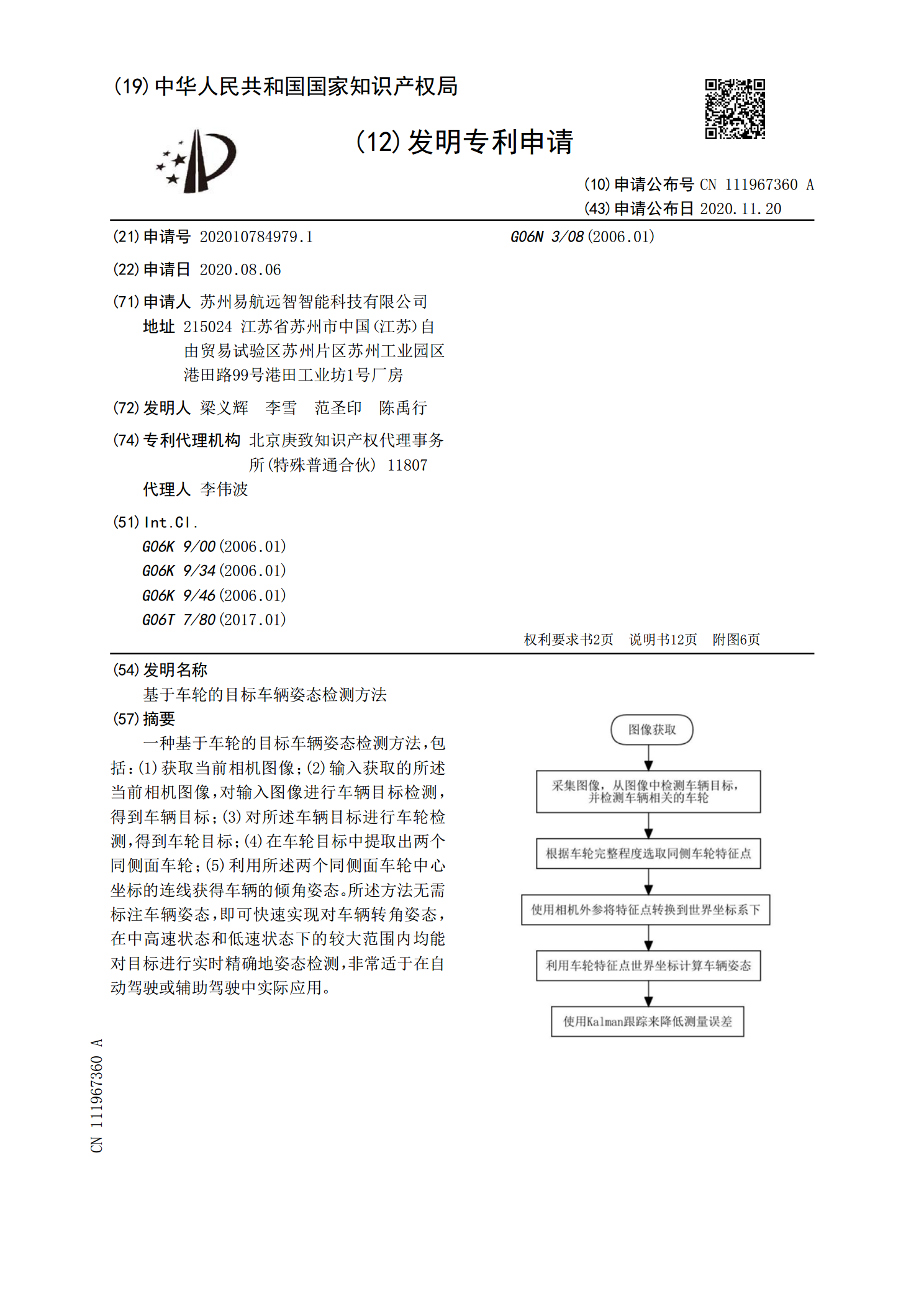
基于车轮的目标车辆姿态检测方法.pdf
一种基于车轮的目标车辆姿态检测方法,包括:(1)获取当前相机图像;(2)输入获取的所述当前相机图像,对输入图像进行车辆目标检测,得到车辆目标;(3)对所述车辆目标进行车轮检测,得到车轮目标;(4)在车轮目标中提取出两个同侧面车轮;(5)利用所述两个同侧面车轮中心坐标的连线获得车辆的倾角姿态。所述方法无需标注车辆姿态,即可快速实现对车辆转角姿态,在中高速状态和低速状态下的较大范围内均能对目标进行实时精确地姿态检测,非常适于在自动驾驶或辅助驾驶中实际应用。

一种防车辆碰撞的方法及装置.pdf
本发明提供一种防车辆碰撞方法及装置,涉及汽车技术领域,能够有效避免追尾事故的发生。该方法包括:首先,检测车辆与该车辆前车之间的行车距离,然后,根据检测的车辆与该车辆的前车之间的行车距离,确定车辆是否可能与该车辆的前车发生追尾,若可能发生追尾,则限制所述车辆的车速。本发明可用于车辆的防碰撞技术中。
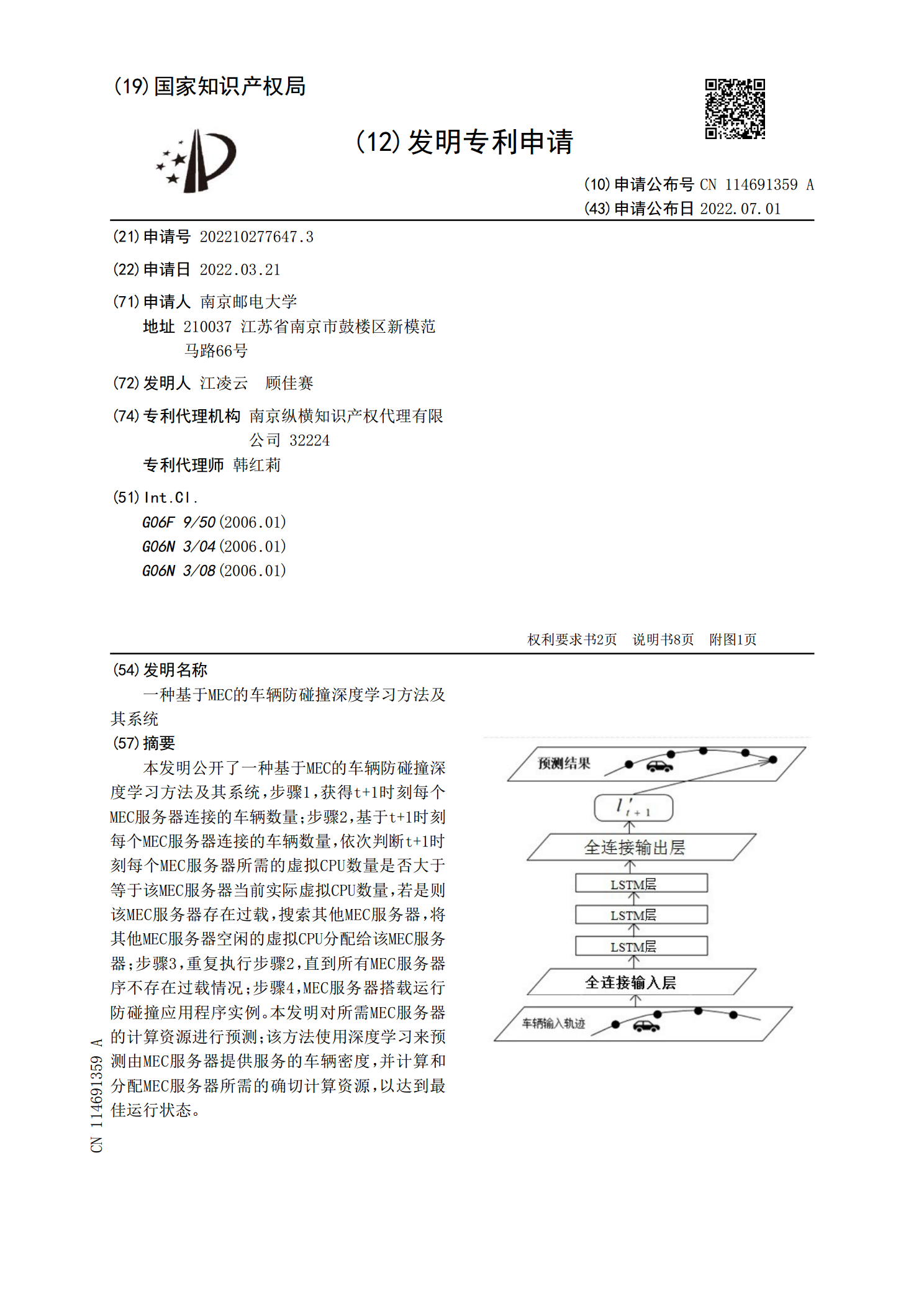
一种基于MEC的车辆防碰撞深度学习方法及其系统.pdf
本发明公开了一种基于MEC的车辆防碰撞深度学习方法及其系统,步骤1,获得t+1时刻每个MEC服务器连接的车辆数量;步骤2,基于t+1时刻每个MEC服务器连接的车辆数量,依次判断t+1时刻每个MEC服务器所需的虚拟CPU数量是否大于等于该MEC服务器当前实际虚拟CPU数量,若是则该MEC服务器存在过载,搜索其他MEC服务器,将其他MEC服务器空闲的虚拟CPU分配给该MEC服务器;步骤3,重复执行步骤2,直到所有MEC服务器序不存在过载情况;步骤4,MEC服务器搭载运行防碰撞应用程序实例。本发明对所需MEC服