
基于车轮的目标车辆姿态检测方法.pdf

St****36


1/10

2/10
3/10

4/10

5/10
6/10
7/10

8/10
9/10
10/10
亲,该文档总共21页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于车轮的目标车辆姿态检测方法.pdf
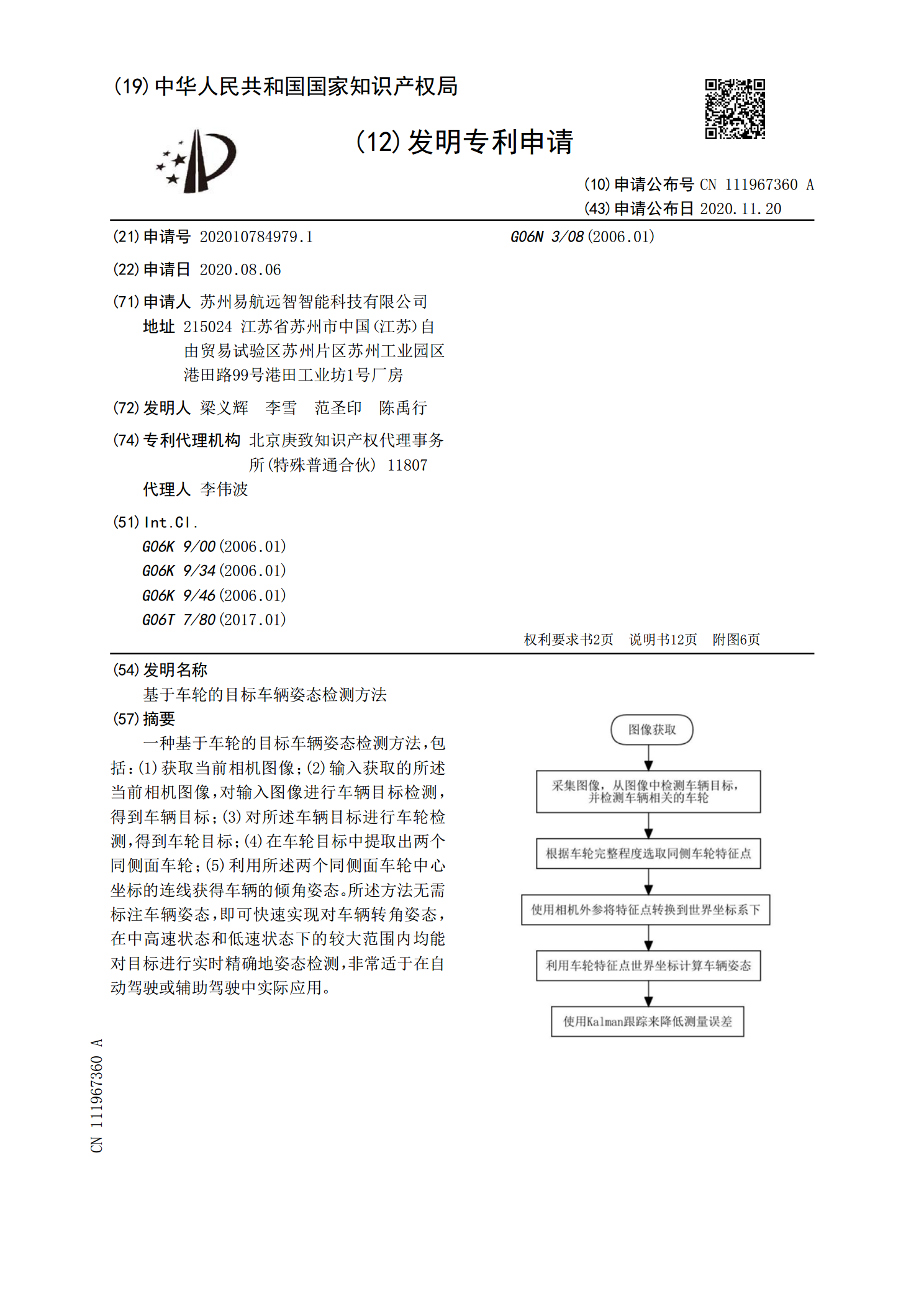
一种基于车轮的目标车辆姿态检测方法,包括:(1)获取当前相机图像;(2)输入获取的所述当前相机图像,对输入图像进行车辆目标检测,得到车辆目标;(3)对所述车辆目标进行车轮检测,得到车轮目标;(4)在车轮目标中提取出两个同侧面车轮;(5)利用所述两个同侧面车轮中心坐标的连线获得车辆的倾角姿态。所述方法无需标注车辆姿态,即可快速实现对车辆转角姿态,在中高速状态和低速状态下的较大范围内均能对目标进行实时精确地姿态检测,非常适于在自动驾驶或辅助驾驶中实际应用。
一种基于车轮检测的车辆防碰撞方法.pdf
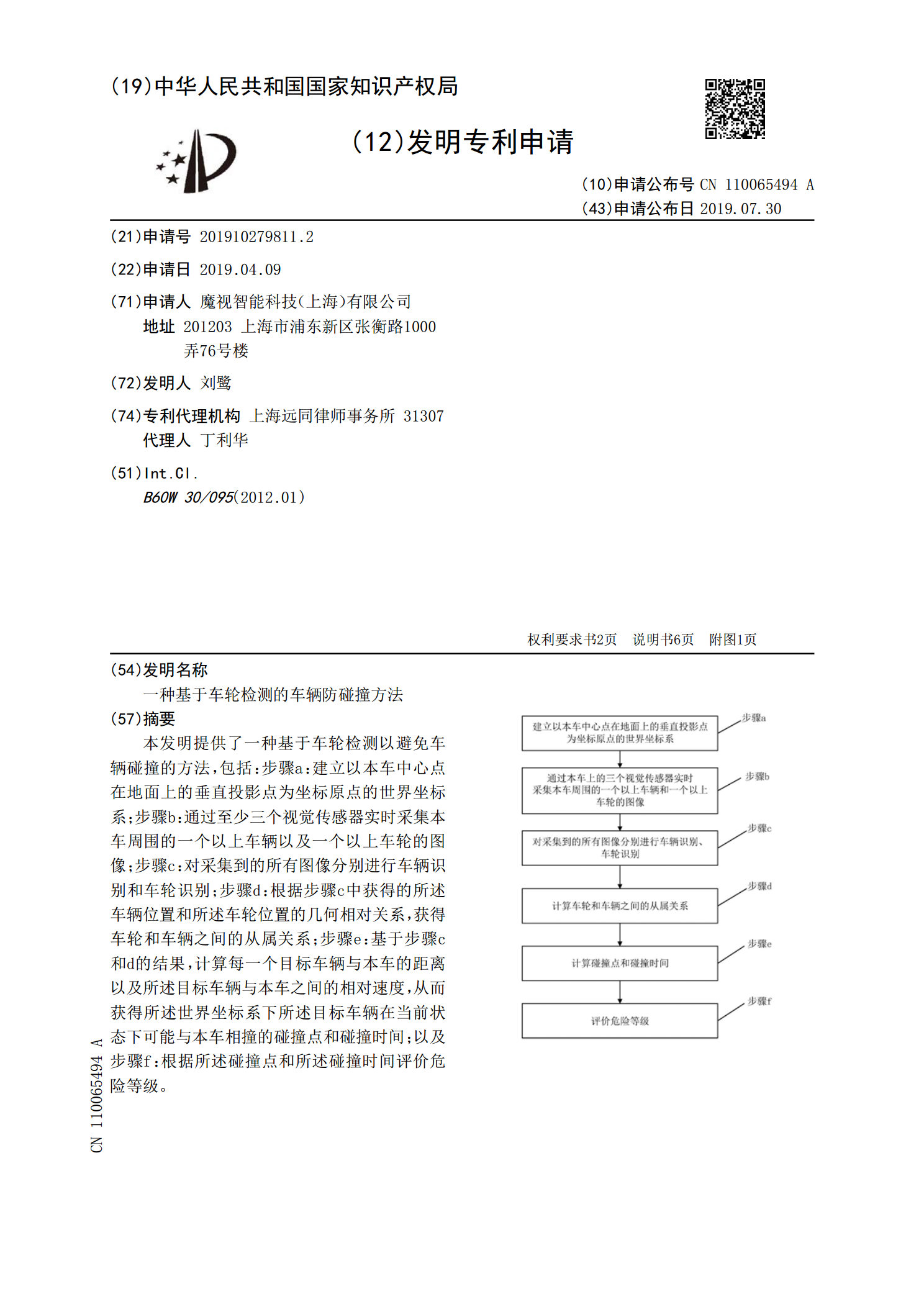
本发明提供了一种基于车轮检测以避免车辆碰撞的方法,包括:步骤a:建立以本车中心点在地面上的垂直投影点为坐标原点的世界坐标系;步骤b:通过至少三个视觉传感器实时采集本车周围的一个以上车辆以及一个以上车轮的图像;步骤c:对采集到的所有图像分别进行车辆识别和车轮识别;步骤d:根据步骤c中获得的所述车辆位置和所述车轮位置的几何相对关系,获得车轮和车辆之间的从属关系;步骤e:基于步骤c和d的结果,计算每一个目标车辆与本车的距离以及所述目标车辆与本车之间的相对速度,从而获得所述世界坐标系下所述目标车辆在当前状态下可能

基于车轮传感器检测阵的车辆作业情况检测方法.pdf
基于车轮传感器检测阵的车辆作业情况检测方法,涉及铁路车号自动识别装置中的传感器检测阵技术领域。本发明是为了解决难以识别复杂的铁路车辆作业情况的问题。本发明所述的基于车轮传感器检测阵的车辆作业情况检测方法,将4个车轮传感器构成一个检测阵,使用信息融合算法,针对不同的作业情况设计了多种判别模型,可以识别中途停车情况和准确判别车辆运行方向。本发明能够在车速低于5km/h的情况下,也可以准确识别车轮信号,完成计轴、判辆。
一种基于栅格卷积网络的车辆姿态检测方法.pdf
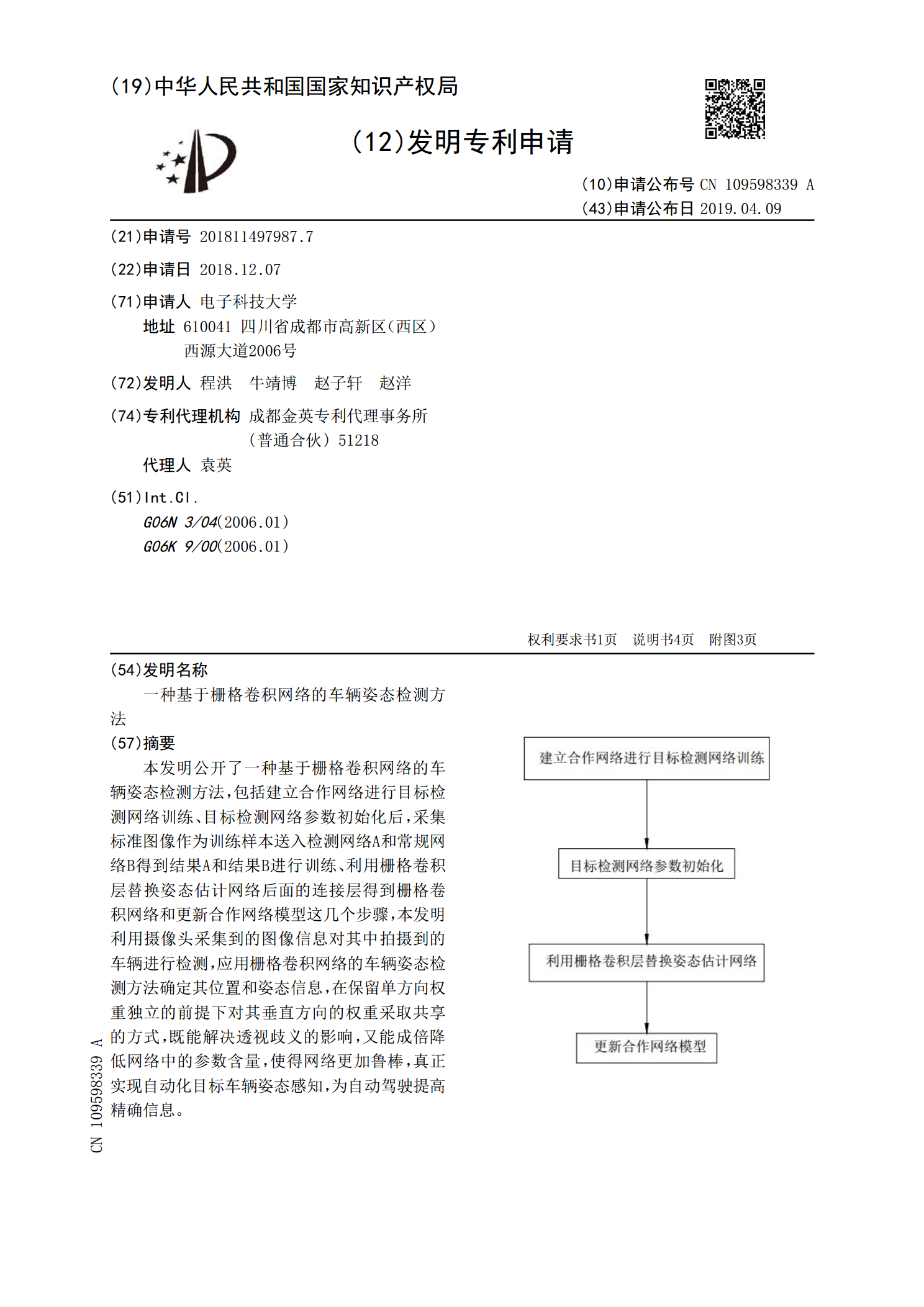
本发明公开了一种基于栅格卷积网络的车辆姿态检测方法,包括建立合作网络进行目标检测网络训练、目标检测网络参数初始化后,采集标准图像作为训练样本送入检测网络A和常规网络B得到结果A和结果B进行训练、利用栅格卷积层替换姿态估计网络后面的连接层得到栅格卷积网络和更新合作网络模型这几个步骤,本发明利用摄像头采集到的图像信息对其中拍摄到的车辆进行检测,应用栅格卷积网络的车辆姿态检测方法确定其位置和姿态信息,在保留单方向权重独立的前提下对其垂直方向的权重采取共享的方式,既能解决透视歧义的影响,又能成倍降低网络中的参数含
基于GPS定位技术的车辆运行姿态检测.pdf
基于GPS定位技术的车辆运行姿态检测系统的研究与设计二零一五年四月摘要实时地获得载体平台的姿态参数一直是测控领域一个很重要的研究方向,但是传统测控方法在处理速度和成本等方面存在诸多弊端。随着GPS定位精度的日益提高,利用GPS进行平台测姿的技术应运而生了。论文针对基于GPS的单基线二维姿态测量技术进行了深入的研究,为利用GPS进行平台姿态测量提供了理论基础和实践依据。文章首先简要介绍了GPS系统的组成,GPS定位的基本原理,载波相位测量基本原理、GPS测量过程中的误差来源和相应的解决办法。然后对GPS姿态