
电力铁塔攀爬机器人.pdf

鹏飞****可爱

1/6
2/6
3/6
4/6
5/6
6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
电力铁塔攀爬机器人.pdf
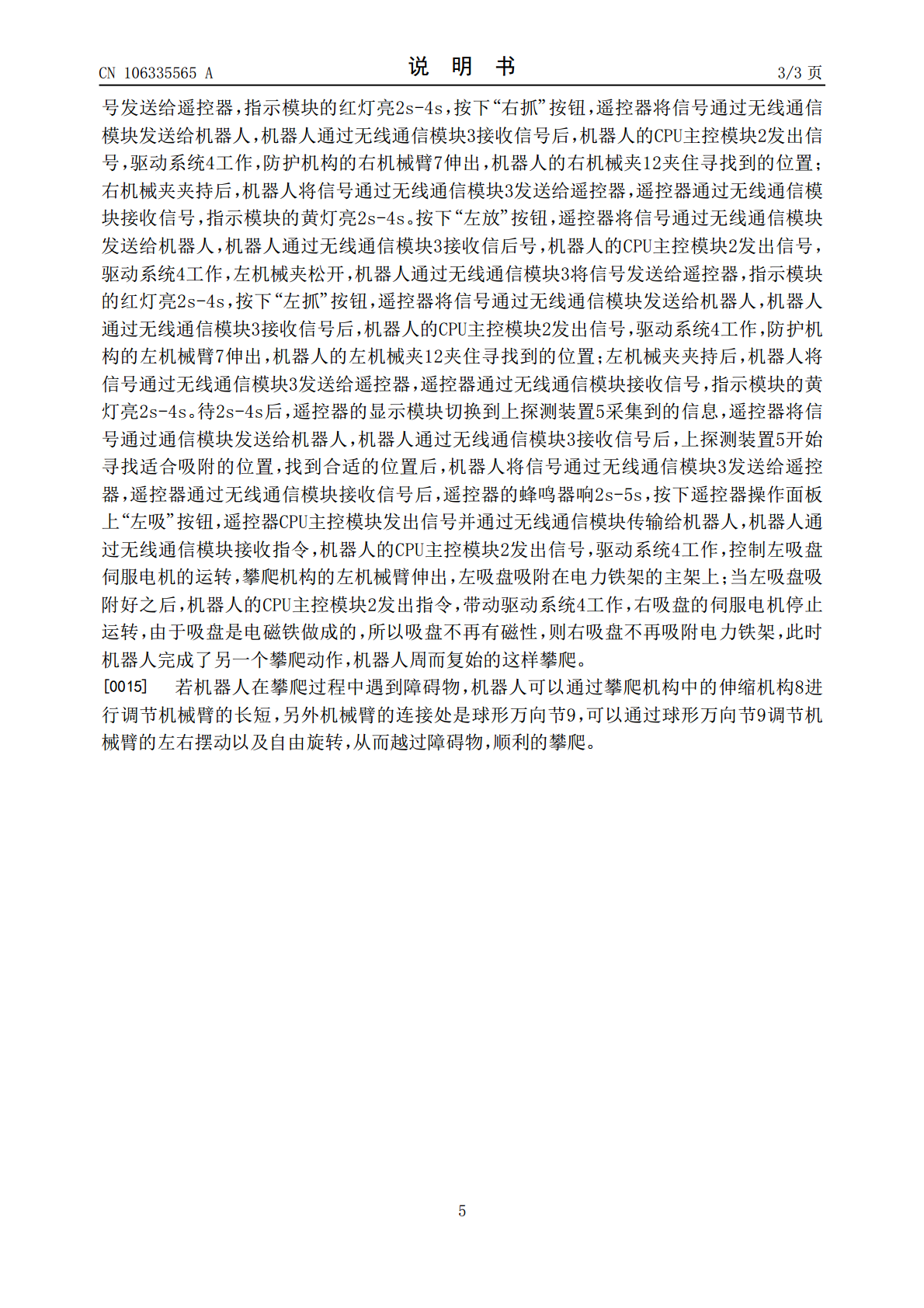
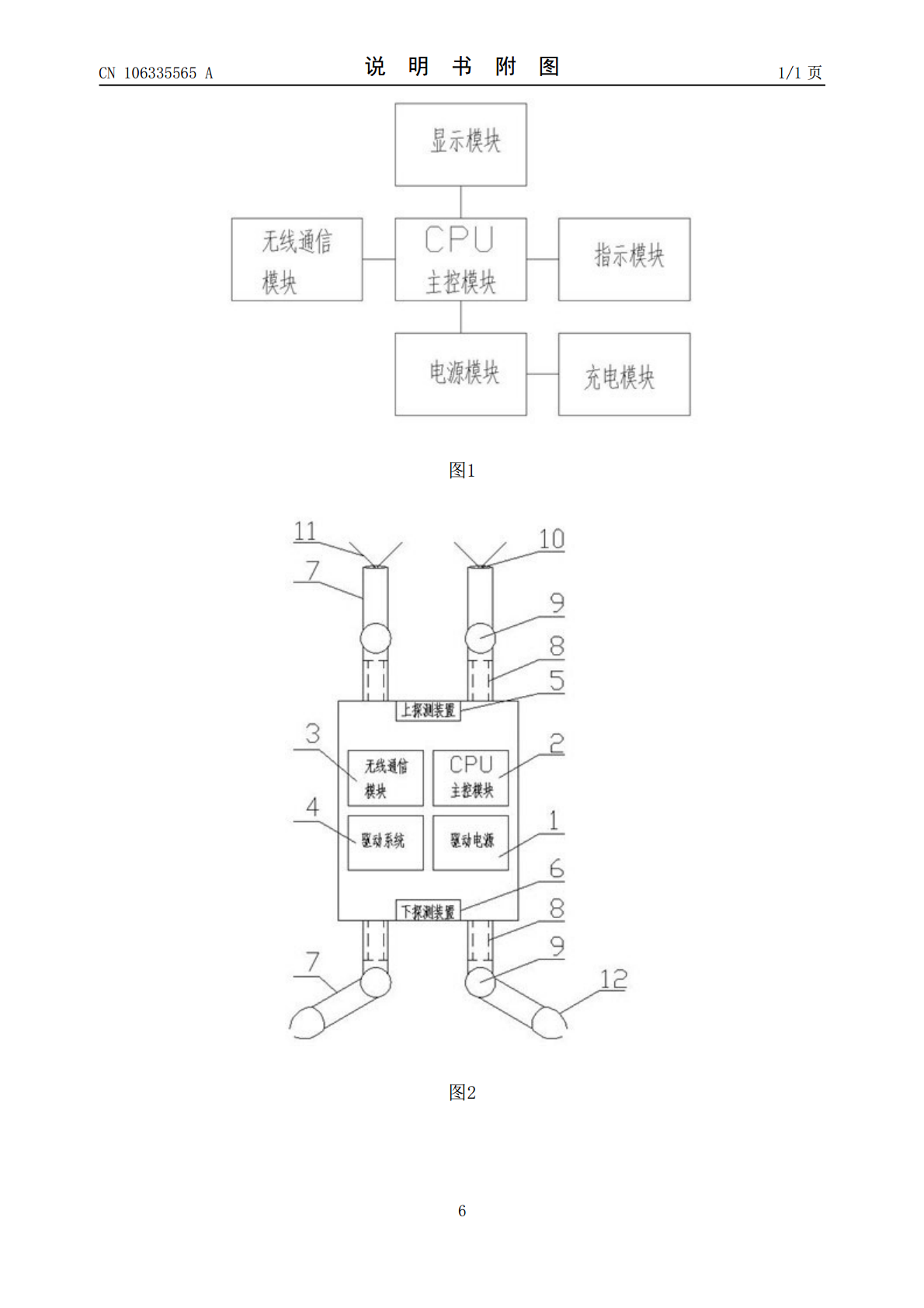
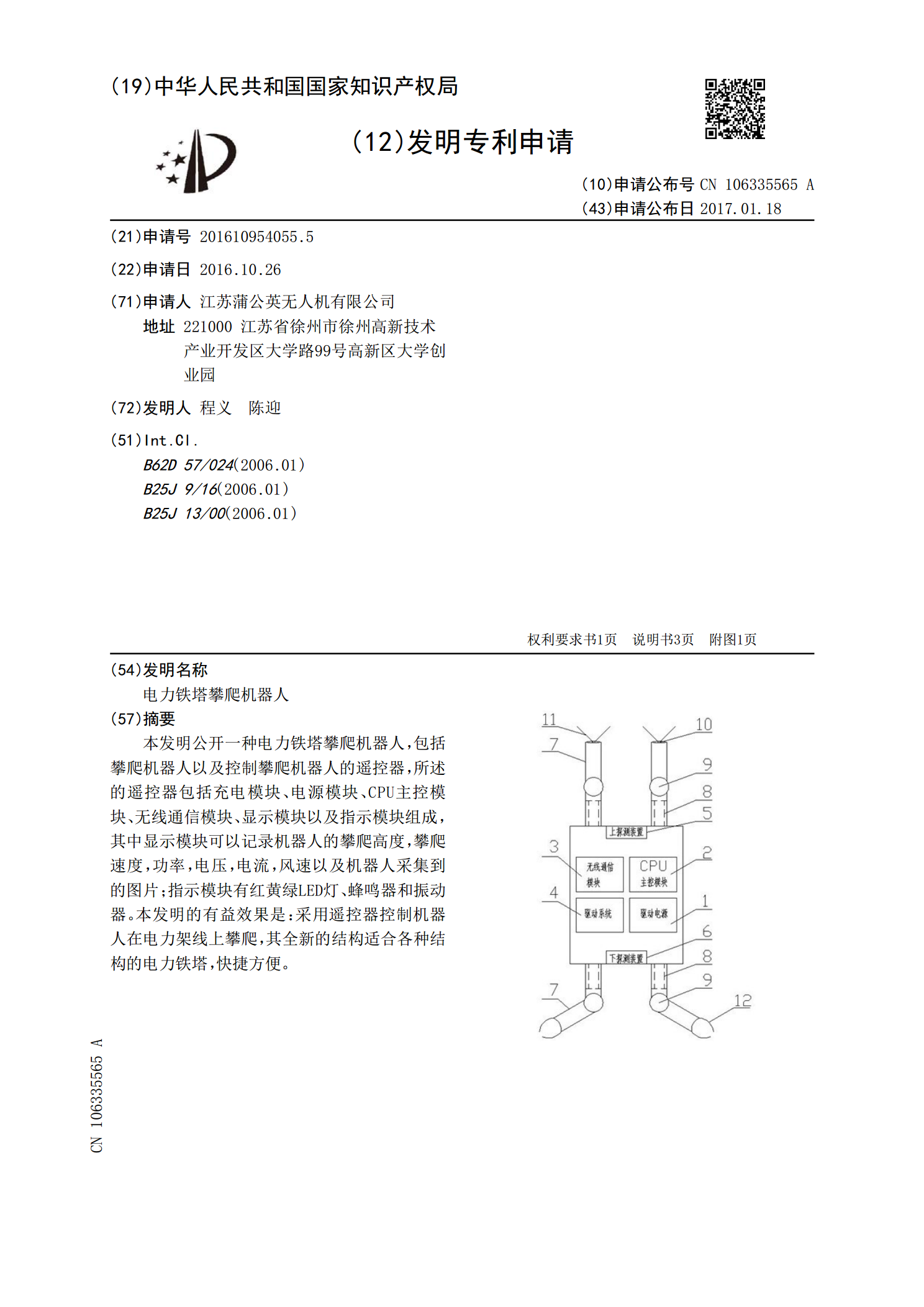
本发明公开一种电力铁塔攀爬机器人,包括攀爬机器人以及控制攀爬机器人的遥控器,所述的遥控器包括充电模块、电源模块、CPU主控模块、无线通信模块、显示模块以及指示模块组成,其中显示模块可以记录机器人的攀爬高度,攀爬速度,功率,电压,电流,风速以及机器人采集到的图片;指示模块有红黄绿LED灯、蜂鸣器和振动器。本发明的有益效果是:采用遥控器控制机器人在电力架线上攀爬,其全新的结构适合各种结构的电力铁塔,快捷方便。
电力铁塔防攀爬装置.pdf
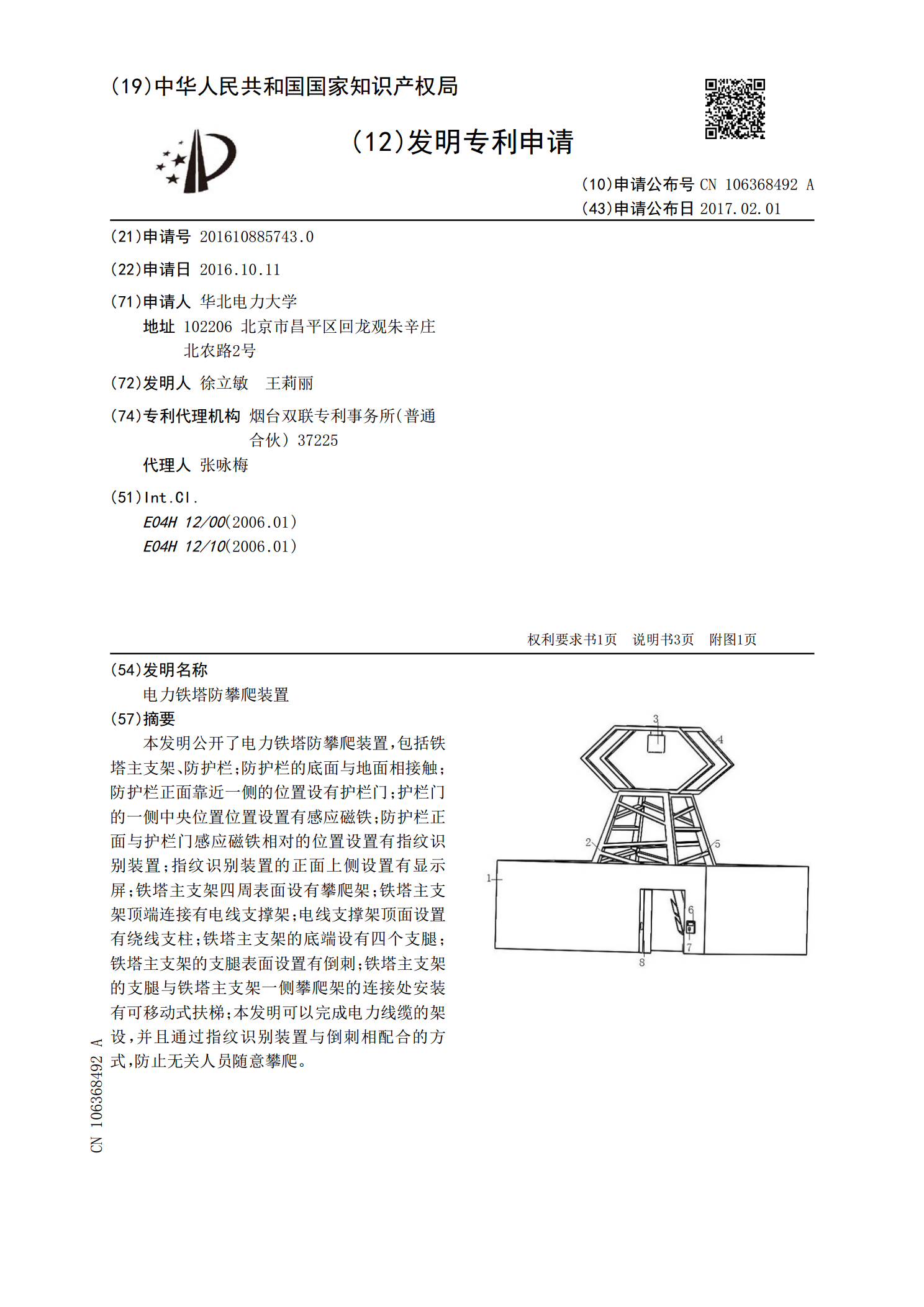
本发明公开了电力铁塔防攀爬装置,包括铁塔主支架、防护栏;防护栏的底面与地面相接触;防护栏正面靠近一侧的位置设有护栏门;护栏门的一侧中央位置位置设置有感应磁铁;防护栏正面与护栏门感应磁铁相对的位置设置有指纹识别装置;指纹识别装置的正面上侧设置有显示屏;铁塔主支架四周表面设有攀爬架;铁塔主支架顶端连接有电线支撑架;电线支撑架顶面设置有绕线支柱;铁塔主支架的底端设有四个支腿;铁塔主支架的支腿表面设置有倒刺;铁塔主支架的支腿与铁塔主支架一侧攀爬架的连接处安装有可移动式扶梯;本发明可以完成电力线缆的架设,并且通过指
电力铁塔自动圆形攀爬装置.pdf
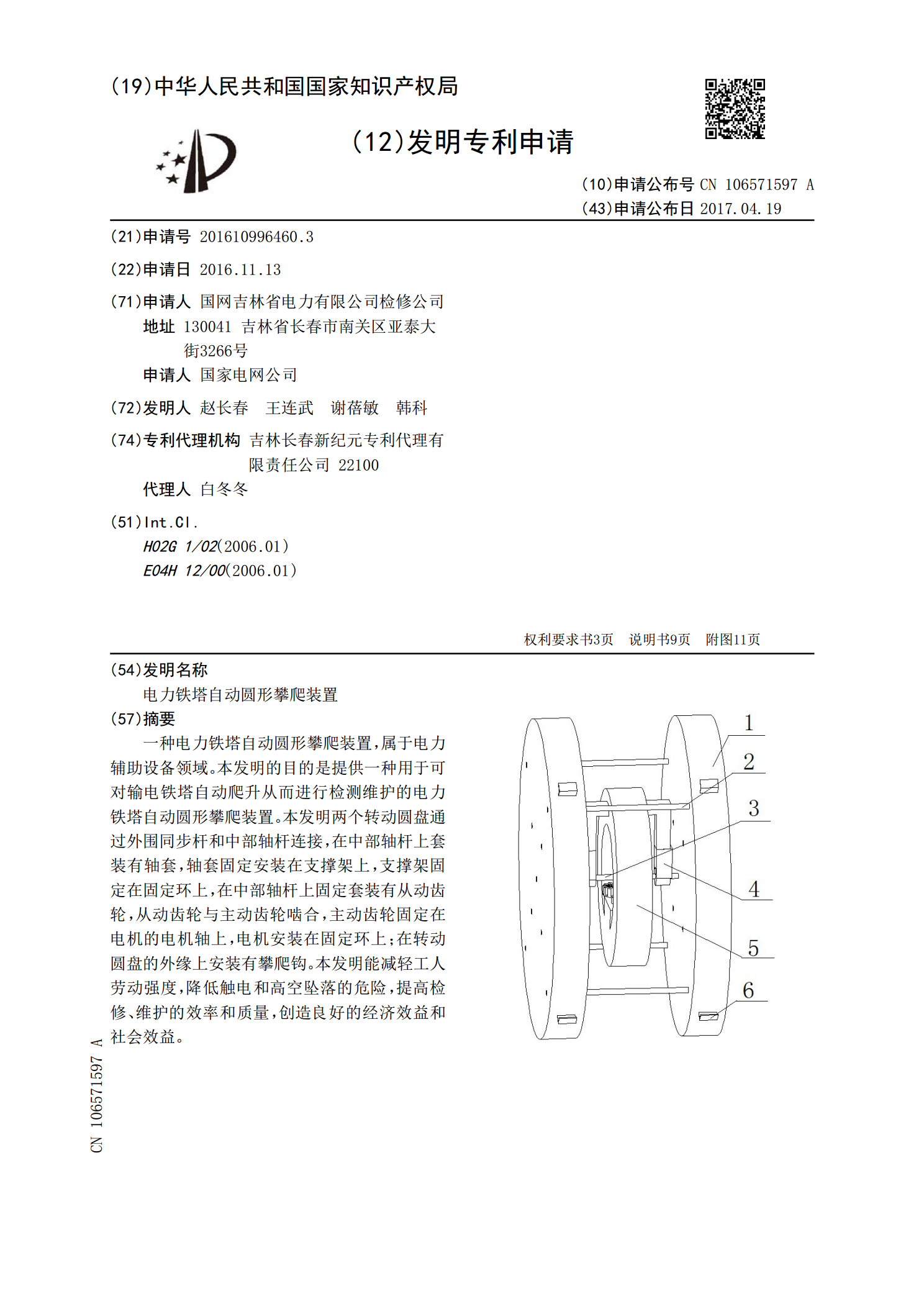
一种电力铁塔自动圆形攀爬装置,属于电力辅助设备领域。本发明的目的是提供一种用于可对输电铁塔自动爬升从而进行检测维护的电力铁塔自动圆形攀爬装置。本发明两个转动圆盘通过外围同步杆和中部轴杆连接,在中部轴杆上套装有轴套,轴套固定安装在支撑架上,支撑架固定在固定环上,在中部轴杆上固定套装有从动齿轮,从动齿轮与主动齿轮啮合,主动齿轮固定在电机的电机轴上,电机安装在固定环上;在转动圆盘的外缘上安装有攀爬钩。本发明能减轻工人劳动强度,降低触电和高空坠落的危险,提高检修、维护的效率和质量,创造良好的经济效益和社会效益。

电力铁塔自动方形攀爬装置.pdf
一种电力铁塔自动方形攀爬装置,属于电力系统辅助设备领域。本发明的目的是通过携带的传感器检测塔身,及时排除铁塔存在的安全隐患,同时有一定负载能力可以将人或设备运至铁塔上进行工作的电力铁塔自动方形攀爬装置。本发明是由两个内部结构相同的右攀爬装置和左攀爬装置构成,在右攀爬装置和左攀爬装置内部的顶端均通过滑轮架安装有上支点滑轮,在上支点滑轮的下端侧壁上安装有绕线辊架;在右攀爬装置和左攀爬装置内部的底端均安装有电机,电机的电机轴上安装有动力滑轮,对应动力滑轮的上端通过支架安装有下支点滑轮;在右攀爬装置和左攀爬装置的

关节式铁塔攀爬机器人.pdf
本发明提供一种用于电力铁塔攀爬的机器人。主要由一对机械臂,电动缸,俯仰机构,以及可以对不同规格角钢进行夹持的机械夹持装置组成。其中,两机械臂上端通过安装轴连接,电动缸电机支座和顶杆通过销柱分别与两臂连接,电动缸伸缩驱动双臂绕其上端安装轴旋转,机械臂下端与俯仰机构旋转轴相连,可使机械臂绕旋转轴旋转,实现越障功能。俯仰机构蜗轮箱与机械手腕关节固连,使得机械臂亦可绕机械手腕关节旋转,实现转弯功能。本发明结构紧凑,多关节联动可完成越障、转弯等复杂动作,可攀爬不同结构类型的铁塔,使用范围广,并具有一定的负载能力,可