
关节式铁塔攀爬机器人.pdf

宜欣****外呢

1/10

2/10

3/10

4/10
5/10

6/10
7/10
8/10

9/10
10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

关节式铁塔攀爬机器人.pdf
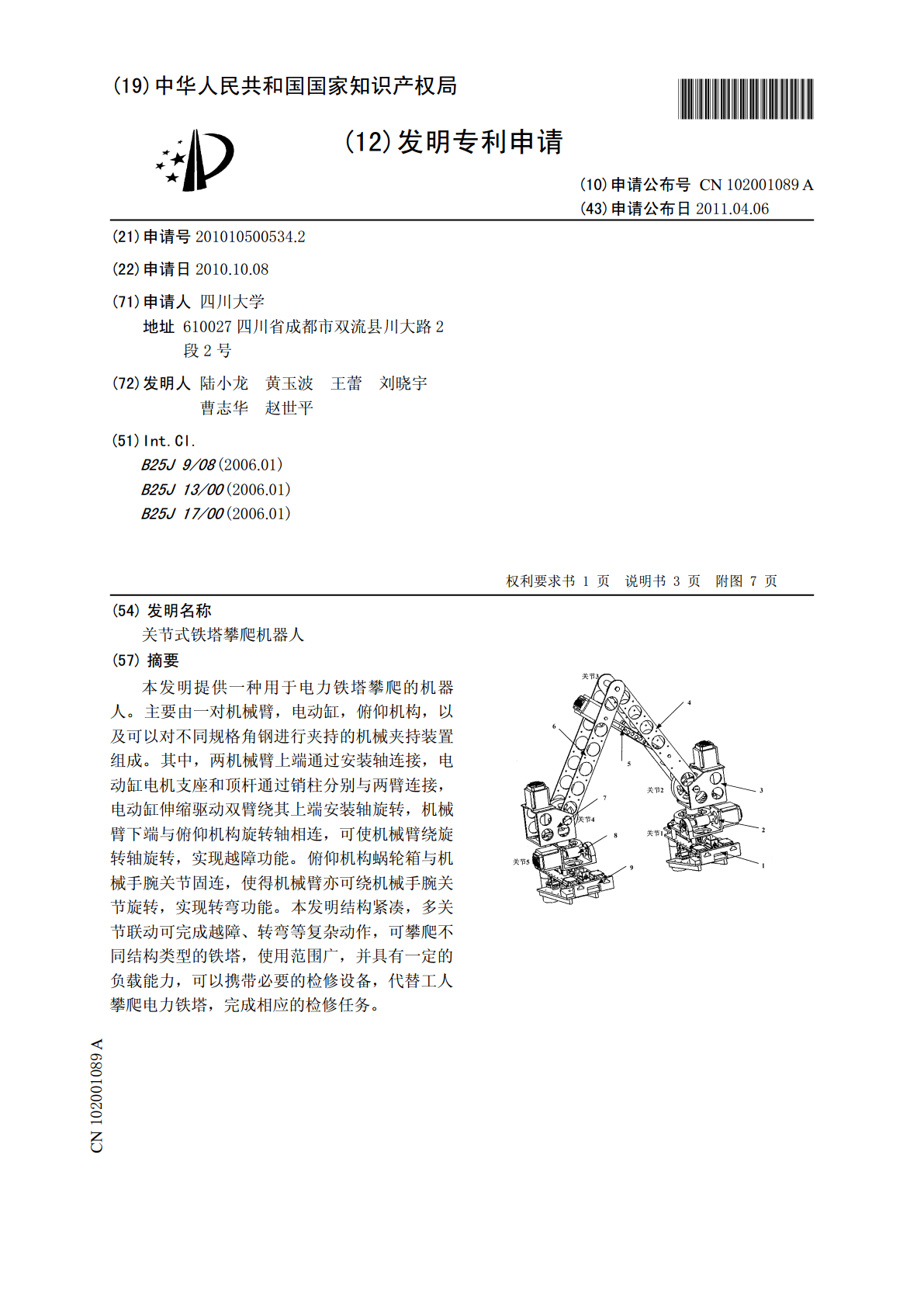
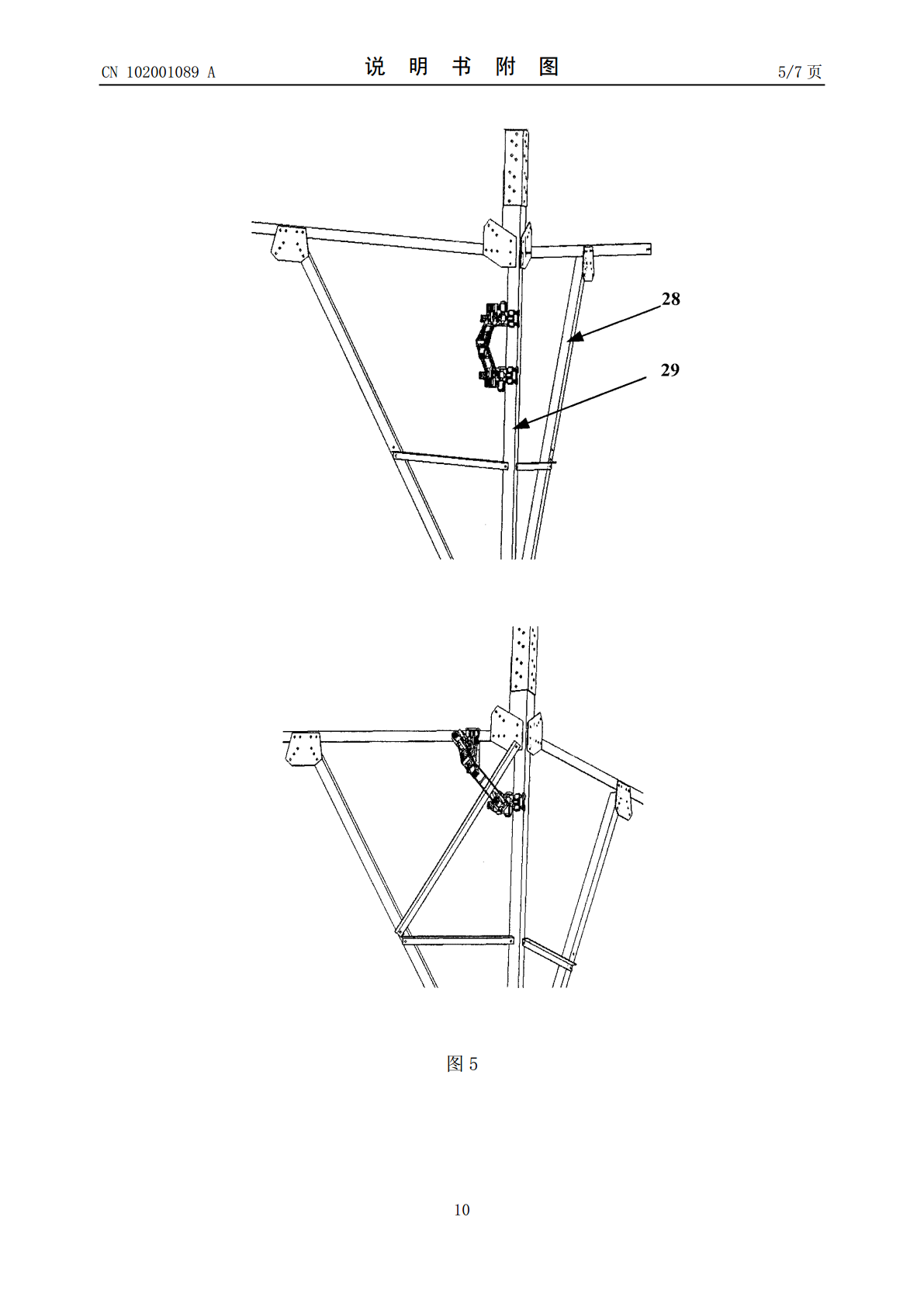
本发明提供一种用于电力铁塔攀爬的机器人。主要由一对机械臂,电动缸,俯仰机构,以及可以对不同规格角钢进行夹持的机械夹持装置组成。其中,两机械臂上端通过安装轴连接,电动缸电机支座和顶杆通过销柱分别与两臂连接,电动缸伸缩驱动双臂绕其上端安装轴旋转,机械臂下端与俯仰机构旋转轴相连,可使机械臂绕旋转轴旋转,实现越障功能。俯仰机构蜗轮箱与机械手腕关节固连,使得机械臂亦可绕机械手腕关节旋转,实现转弯功能。本发明结构紧凑,多关节联动可完成越障、转弯等复杂动作,可攀爬不同结构类型的铁塔,使用范围广,并具有一定的负载能力,可
电力铁塔攀爬机器人.pdf
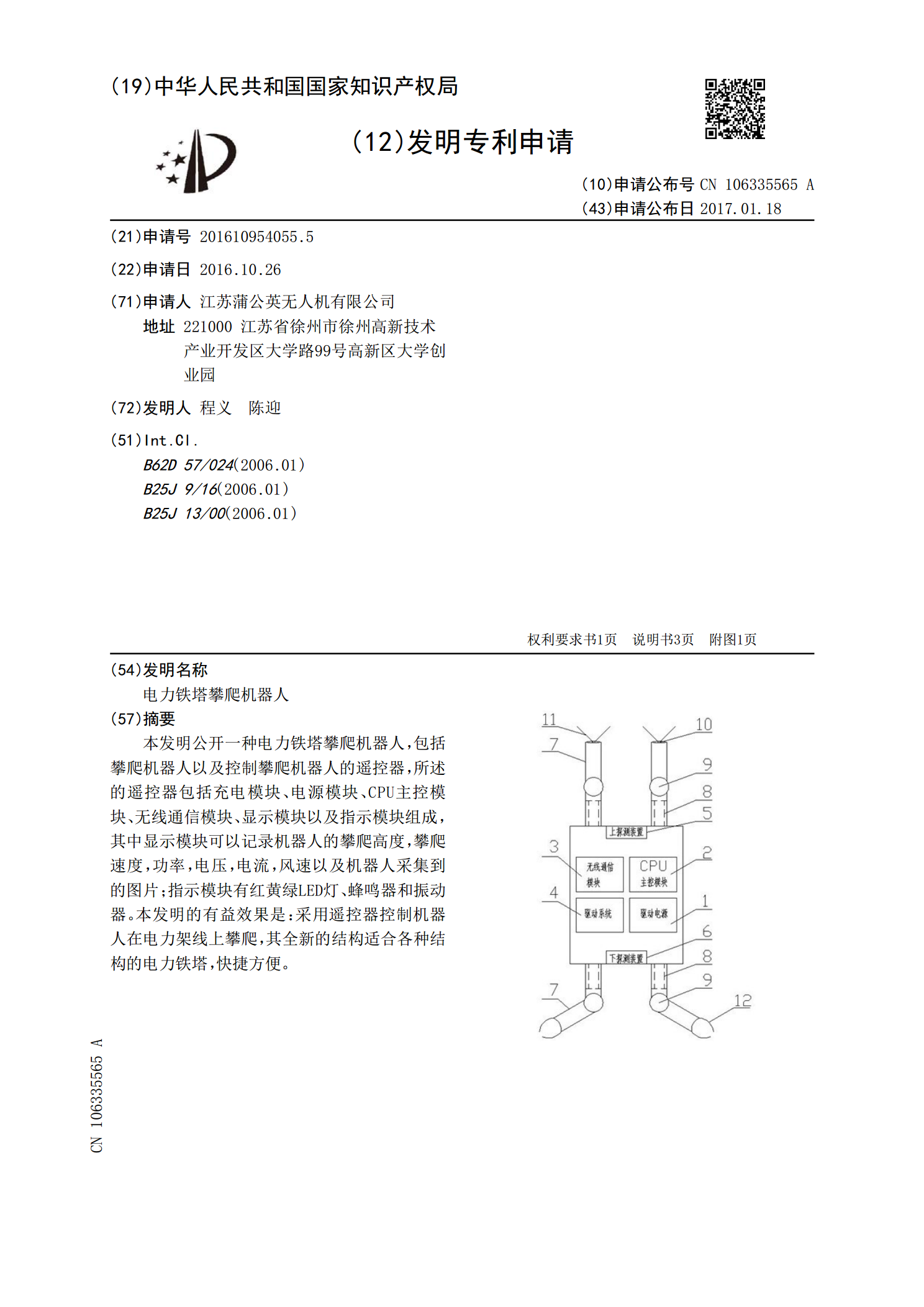
本发明公开一种电力铁塔攀爬机器人,包括攀爬机器人以及控制攀爬机器人的遥控器,所述的遥控器包括充电模块、电源模块、CPU主控模块、无线通信模块、显示模块以及指示模块组成,其中显示模块可以记录机器人的攀爬高度,攀爬速度,功率,电压,电流,风速以及机器人采集到的图片;指示模块有红黄绿LED灯、蜂鸣器和振动器。本发明的有益效果是:采用遥控器控制机器人在电力架线上攀爬,其全新的结构适合各种结构的电力铁塔,快捷方便。

新型铁塔攀爬机器人机械手装置.pdf
本发明提供一种用于铁塔自动检修维护攀爬机器人的末端结构,主要包括夹紧机构、手腕机构、手指伸缩机构和连接支座。其中夹紧机构应用了杠杆增力原理并采用丝杆螺母传动方式,结构紧凑,带有自锁功能,主要由上夹板,安装在上夹板的驱动电机,与驱动电机输出轴连接的齿轮换向机构,下夹板,以及与齿轮换向机构相连的丝杆螺母机构,顶杆组成。手指伸缩机构由安装在上夹板的驱动电机,与驱动电机输出轴相连的丝杆螺母传动机构,与螺母固连的手指,以及安装在上夹板的导轨组成,与夹紧机构配合使用确保对角钢的可靠夹持。手腕机构由手腕驱动电机,与驱动

智能翻转式攀爬机器人1.doc
智能翻转式攀爬机器人公布号:CN101695835A公布日:2010.04.21申请号:200910073108.2申请日:2009.10.29申请人:哈尔滨工程大学地址:150001黑龙江省哈尔滨市南岗区南通大街145号1号楼哈尔滨工程大学科技处知识产权办公室发明人:史冬岩;石先杰;邓波;陆玉婷;李芳发明名称智能翻转式攀爬机器人摘要本发明提供的是一种智能翻转式攀爬机器人。组成包括躯干,安装在躯干上的两个翻转臂,安装在翻转臂上的旋转臂,安装在旋转臂上的夹紧手爪和控制器;所述的躯干包括两平行支撑杆、传动轴、
电力铁塔防攀爬装置.pdf
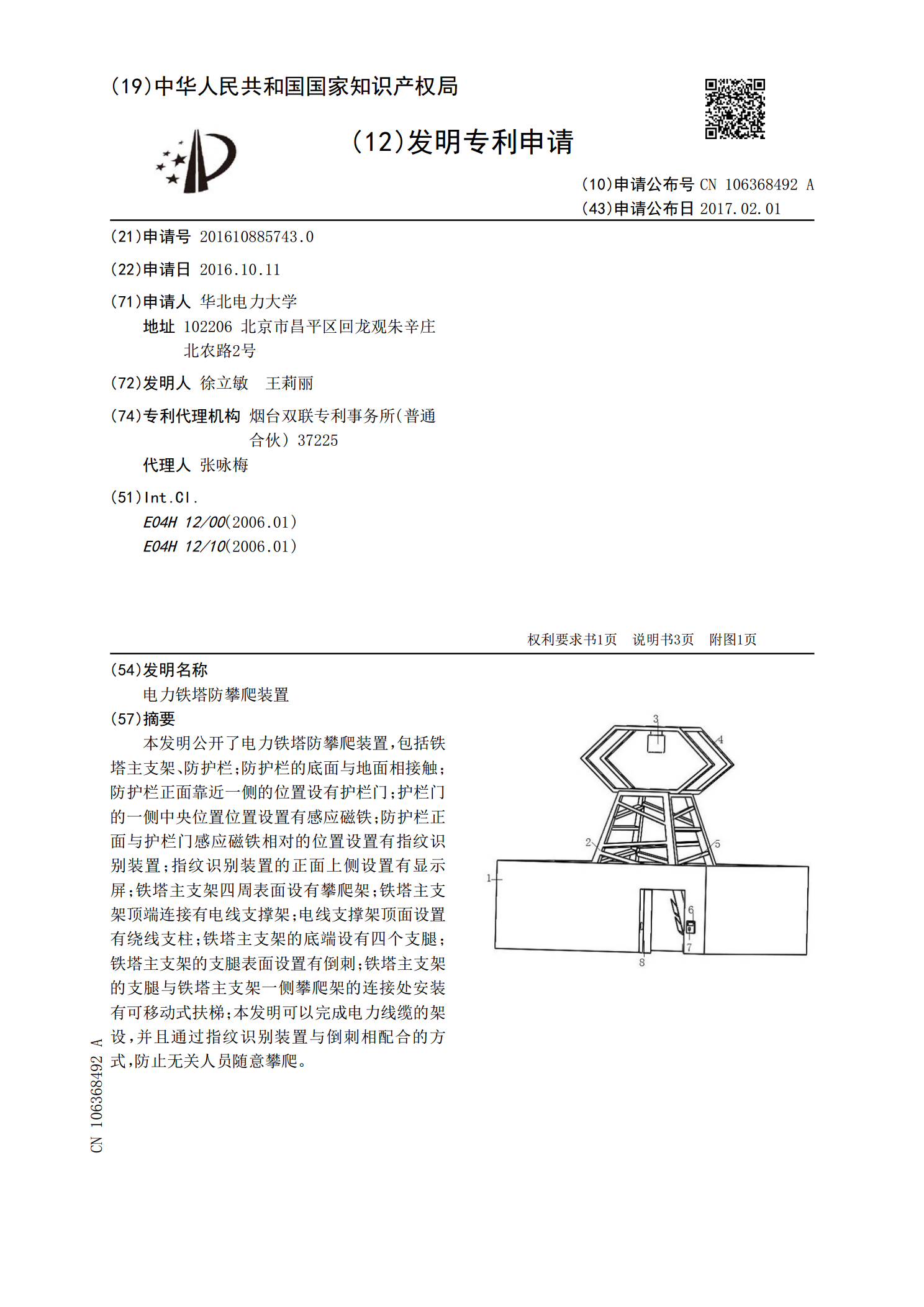
本发明公开了电力铁塔防攀爬装置,包括铁塔主支架、防护栏;防护栏的底面与地面相接触;防护栏正面靠近一侧的位置设有护栏门;护栏门的一侧中央位置位置设置有感应磁铁;防护栏正面与护栏门感应磁铁相对的位置设置有指纹识别装置;指纹识别装置的正面上侧设置有显示屏;铁塔主支架四周表面设有攀爬架;铁塔主支架顶端连接有电线支撑架;电线支撑架顶面设置有绕线支柱;铁塔主支架的底端设有四个支腿;铁塔主支架的支腿表面设置有倒刺;铁塔主支架的支腿与铁塔主支架一侧攀爬架的连接处安装有可移动式扶梯;本发明可以完成电力线缆的架设,并且通过指