
一种A柱盲区消除与辅助驾驶装置及其控制方法.pdf

是你****辉呀

1/10

2/10
3/10
4/10

5/10
6/10

7/10
8/10

9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种A柱盲区消除与辅助驾驶装置及其控制方法.pdf
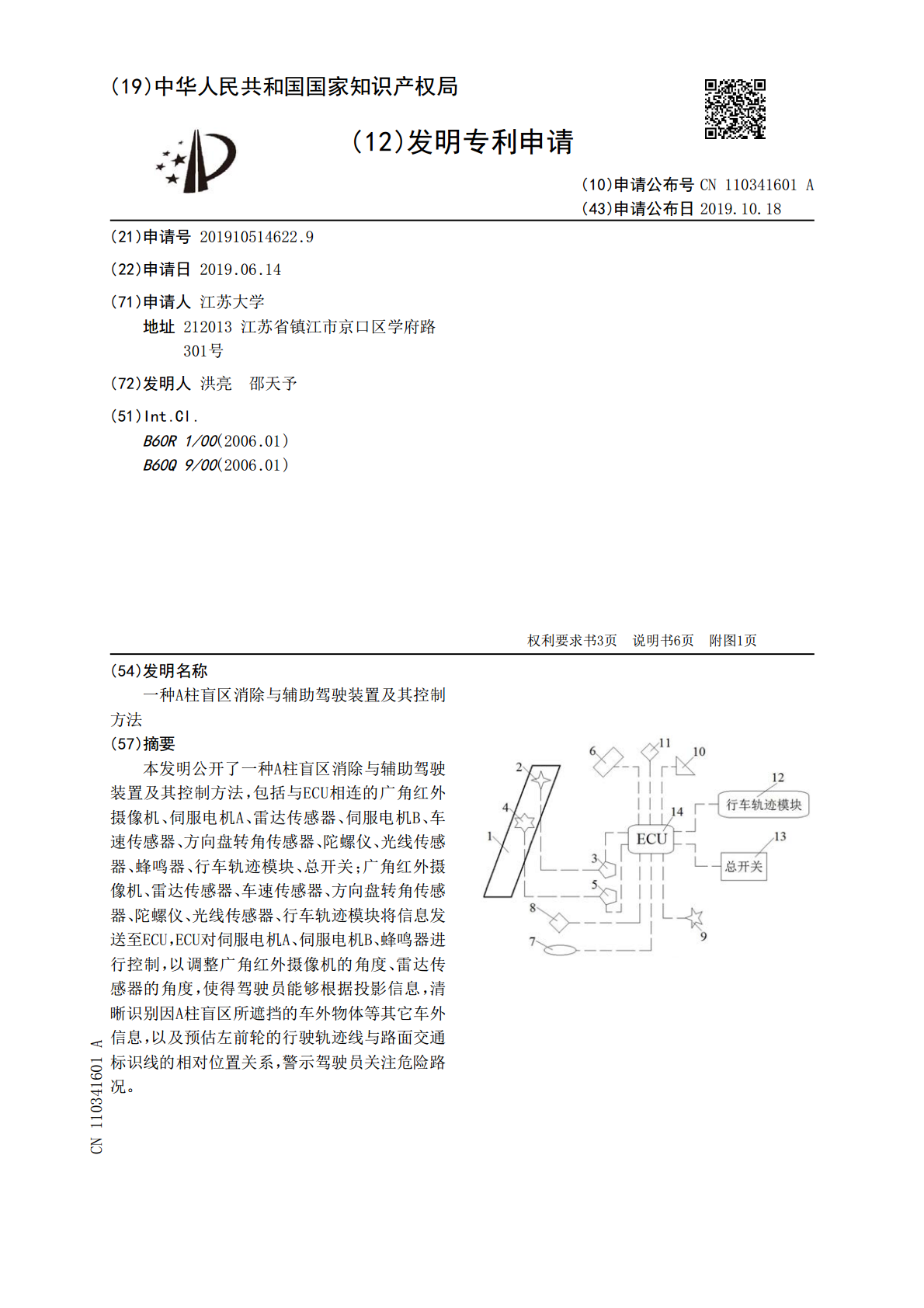
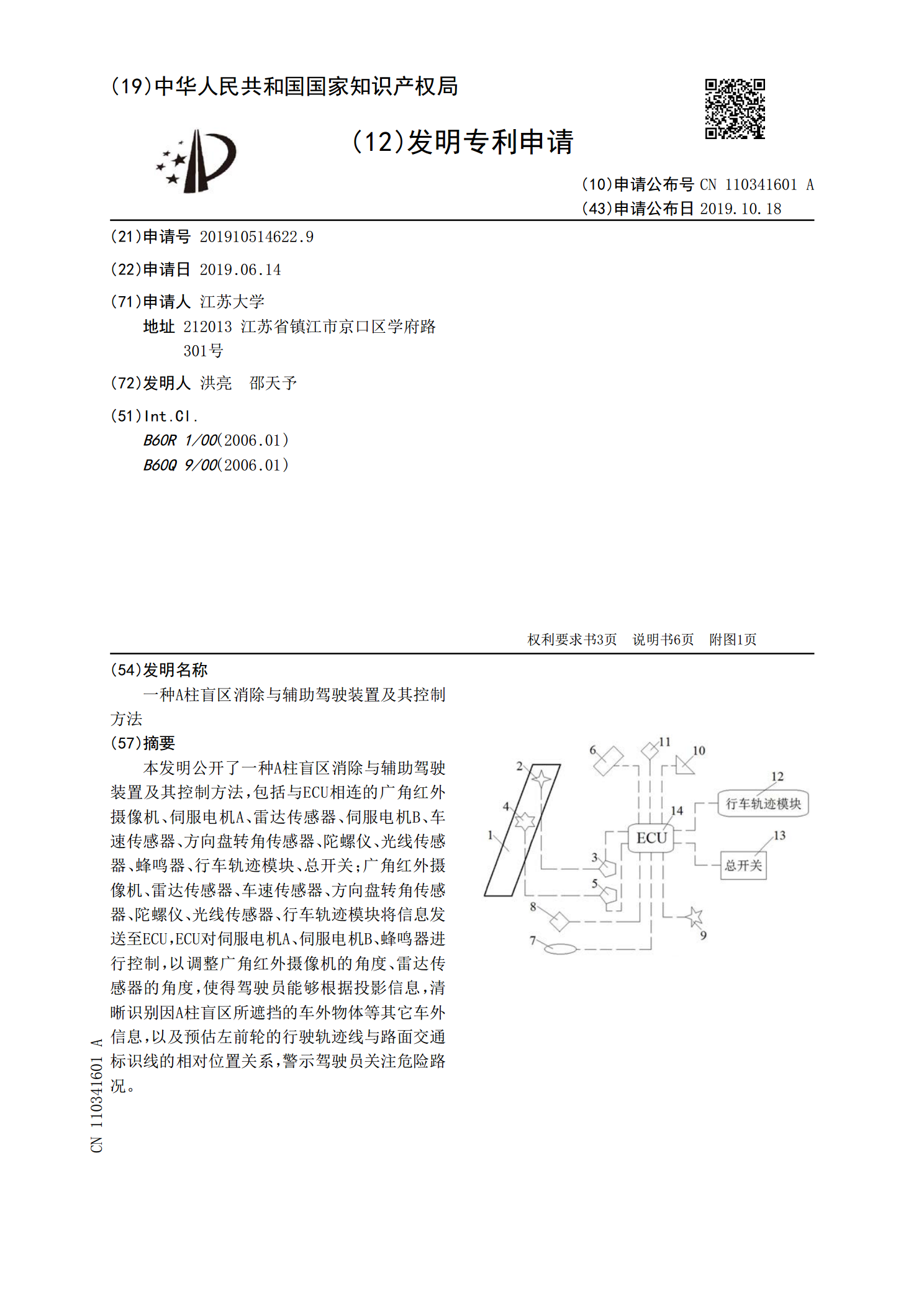
本发明公开了一种A柱盲区消除与辅助驾驶装置及其控制方法,包括与ECU相连的广角红外摄像机、伺服电机A、雷达传感器、伺服电机B、车速传感器、方向盘转角传感器、陀螺仪、光线传感器、蜂鸣器、行车轨迹模块、总开关;广角红外摄像机、雷达传感器、车速传感器、方向盘转角传感器、陀螺仪、光线传感器、行车轨迹模块将信息发送至ECU,ECU对伺服电机A、伺服电机B、蜂鸣器进行控制,以调整广角红外摄像机的角度、雷达传感器的角度,使得驾驶员能够根据投影信息,清晰识别因A柱盲区所遮挡的车外物体等其它车外信息,以及预估左前轮的行驶轨
消除A柱盲区装置和消除A柱盲区装置的控制方法.pdf
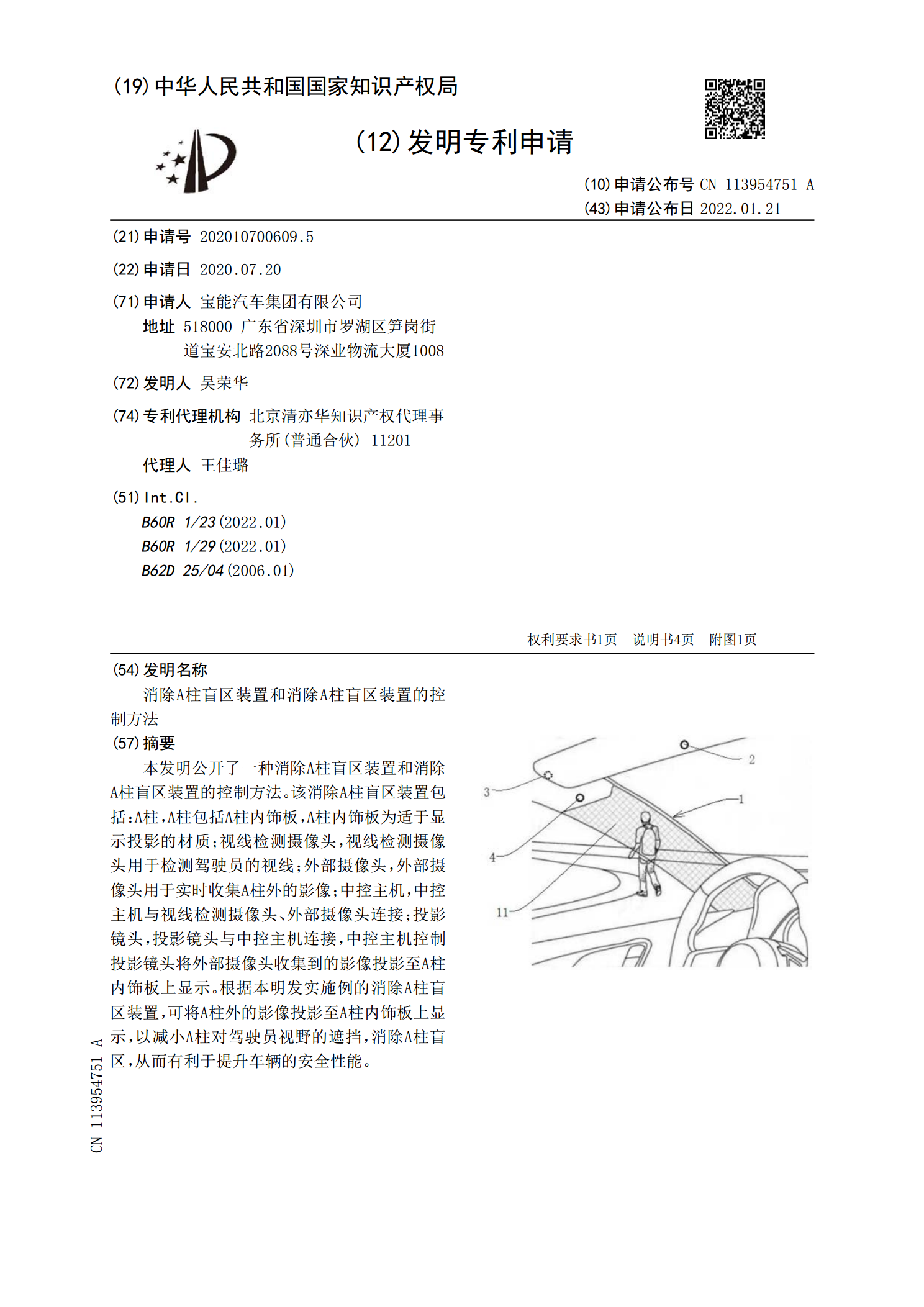
本发明公开了一种消除A柱盲区装置和消除A柱盲区装置的控制方法。该消除A柱盲区装置包括:A柱,A柱包括A柱内饰板,A柱内饰板为适于显示投影的材质;视线检测摄像头,视线检测摄像头用于检测驾驶员的视线;外部摄像头,外部摄像头用于实时收集A柱外的影像;中控主机,中控主机与视线检测摄像头、外部摄像头连接;投影镜头,投影镜头与中控主机连接,中控主机控制投影镜头将外部摄像头收集到的影像投影至A柱内饰板上显示。根据本明发实施例的消除A柱盲区装置,可将A柱外的影像投影至A柱内饰板上显示,以减小A柱对驾驶员视野的遮挡,消除A
一种汽车A柱盲区辅助驾驶装置.pdf
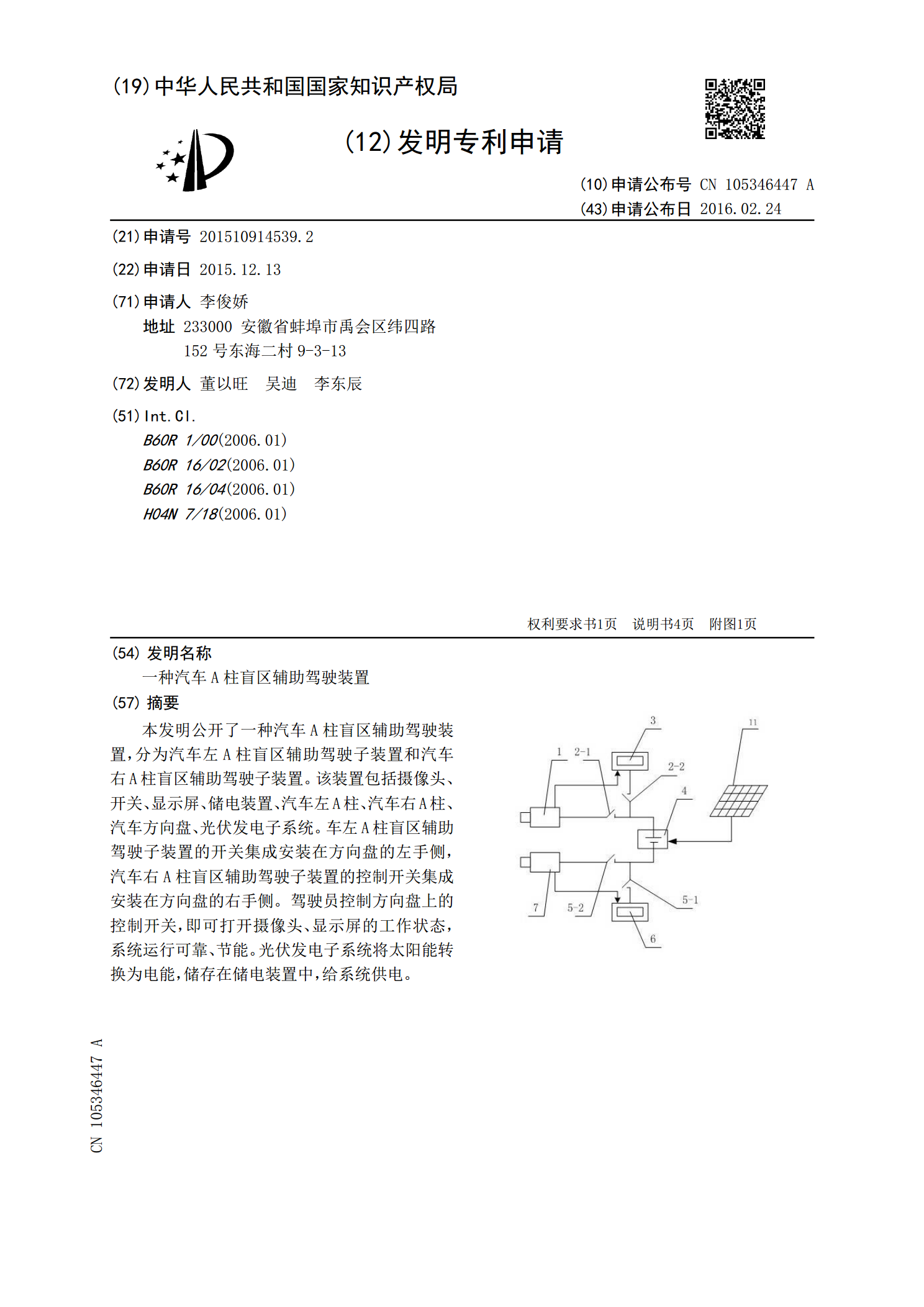
本发明公开了一种汽车A柱盲区辅助驾驶装置,分为汽车左A柱盲区辅助驾驶子装置和汽车右A柱盲区辅助驾驶子装置。该装置包括摄像头、开关、显示屏、储电装置、汽车左A柱、汽车右A柱、汽车方向盘、光伏发电子系统。车左A柱盲区辅助驾驶子装置的开关集成安装在方向盘的左手侧,汽车右A柱盲区辅助驾驶子装置的控制开关集成安装在方向盘的右手侧。驾驶员控制方向盘上的控制开关,即可打开摄像头、显示屏的工作状态,系统运行可靠、节能。光伏发电子系统将太阳能转换为电能,储存在储电装置中,给系统供电。
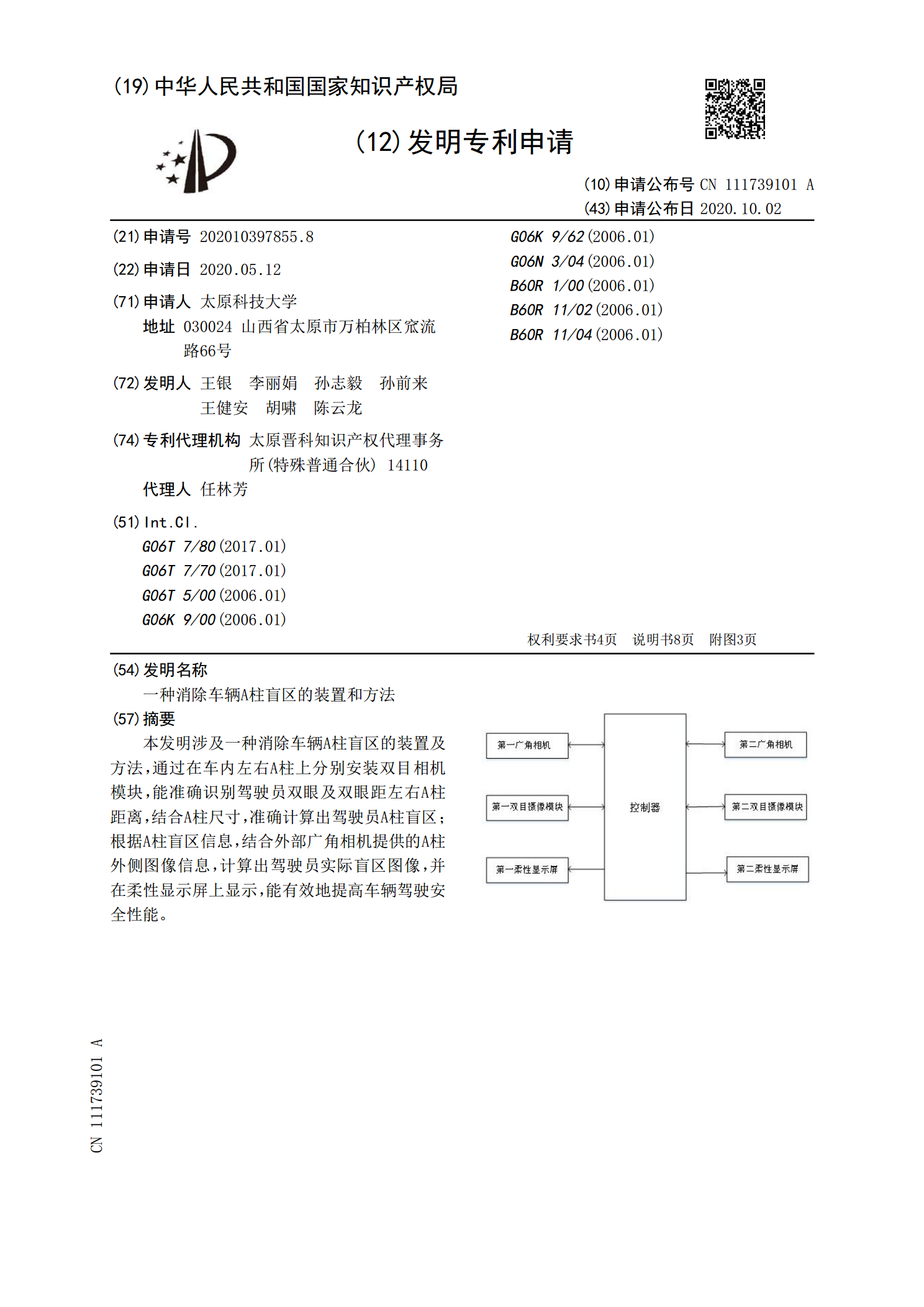
一种消除车辆A柱盲区的装置和方法.pdf
本发明涉及一种消除车辆A柱盲区的装置及方法,通过在车内左右A柱上分别安装双目相机模块,能准确识别驾驶员双眼及双眼距左右A柱距离,结合A柱尺寸,准确计算出驾驶员A柱盲区;根据A柱盲区信息,结合外部广角相机提供的A柱外侧图像信息,计算出驾驶员实际盲区图像,并在柔性显示屏上显示,能有效地提高车辆驾驶安全性能。
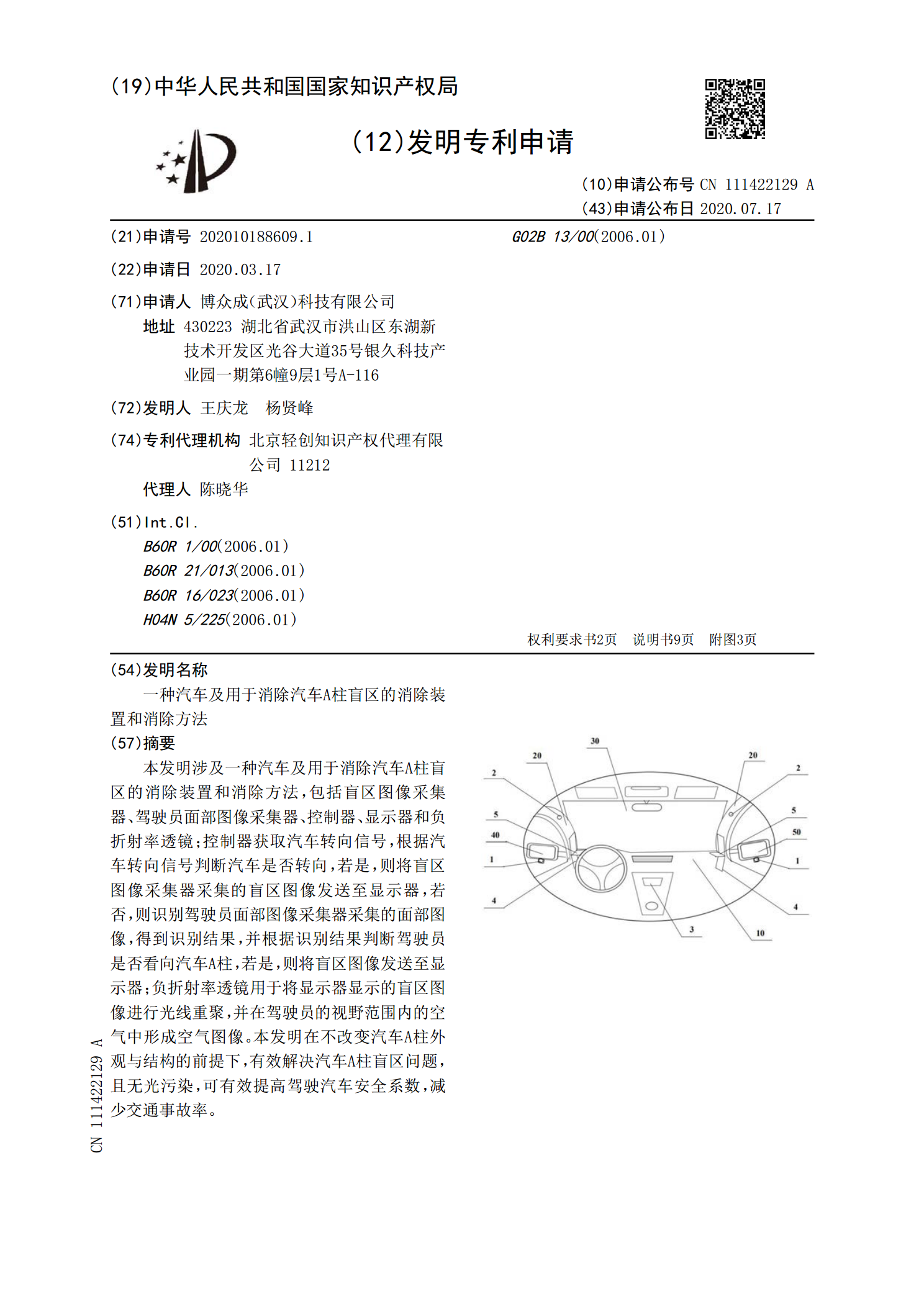
一种汽车及用于消除汽车A柱盲区的消除装置和消除方法.pdf
本发明涉及一种汽车及用于消除汽车A柱盲区的消除装置和消除方法,包括盲区图像采集器、驾驶员面部图像采集器、控制器、显示器和负折射率透镜;控制器获取汽车转向信号,根据汽车转向信号判断汽车是否转向,若是,则将盲区图像采集器采集的盲区图像发送至显示器,若否,则识别驾驶员面部图像采集器采集的面部图像,得到识别结果,并根据识别结果判断驾驶员是否看向汽车A柱,若是,则将盲区图像发送至显示器;负折射率透镜用于将显示器显示的盲区图像进行光线重聚,并在驾驶员的视野范围内的空气中形成空气图像。本发明在不改变汽车A柱外观与结构的