
一种反蜂群无人机的飞行器控制方法及系统.pdf

是你****韵呀


1/10
2/10

3/10
4/10

5/10

6/10
7/10
8/10

9/10
10/10
亲,该文档总共27页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种反蜂群无人机的飞行器控制方法及系统.pdf
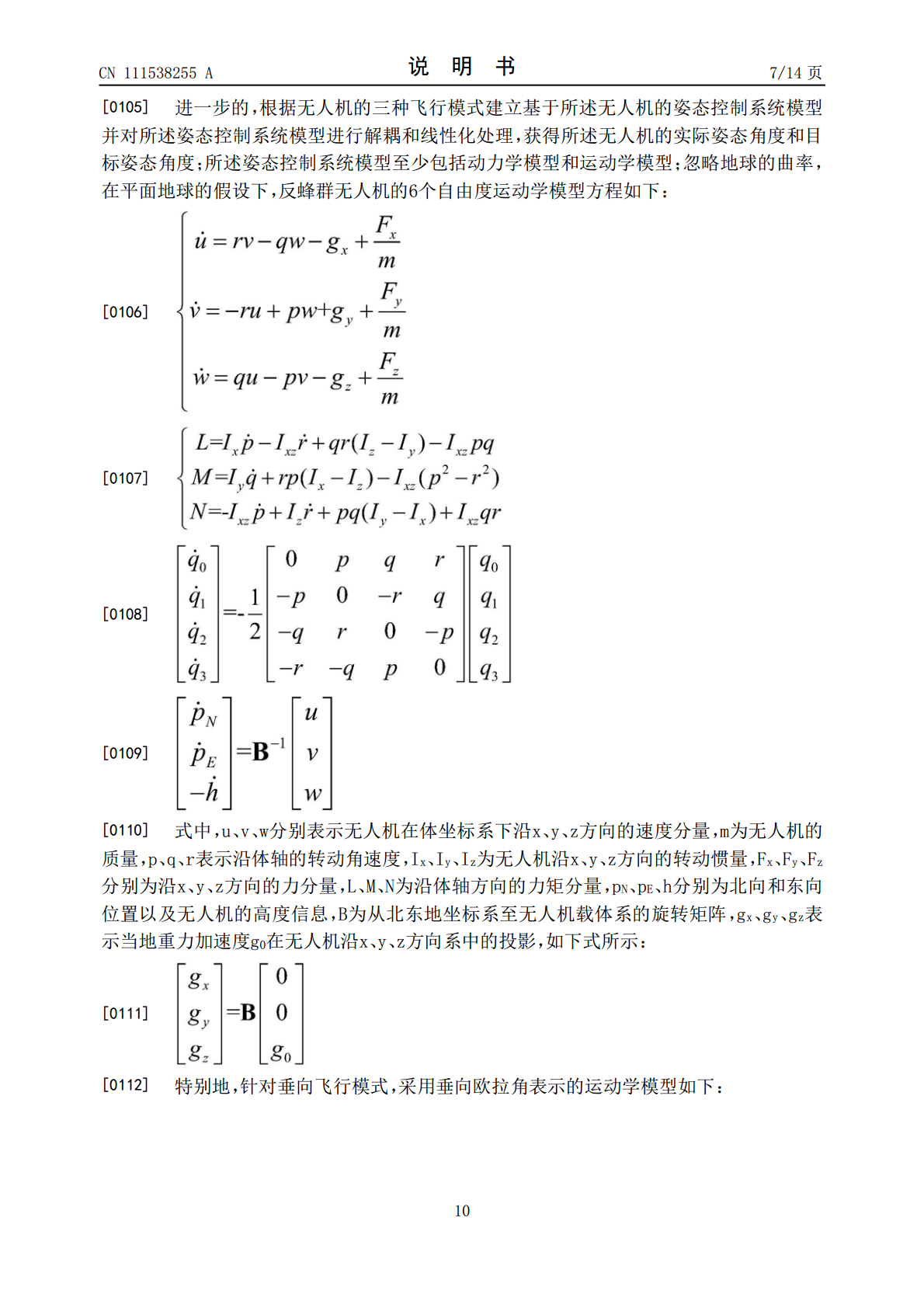
本申请涉及一种反蜂群无人机的飞行器控制方法及系统,包括创建无人机组件和环境组件的模型,所述无人机组件用于模拟反蜂群无人机的性能参数,所述环境组件用于模拟仿真环境参数;根据所述无人机组件模型、所述环境组件模型以及无人机控制器中预先设置的配置信息,生成仿真模型;设置无人机飞行的飞行航线,将所述飞行航线输入到所述仿真模型中;实时采集所述仿真模型输出的仿真飞行参数,当所述仿真飞行参数达到设置的阈值时,向无人机组件发送飞行模式的切换指令。通过垂向飞行模式实现无人机的垂直起降功能,通过水平飞行模式实现无人机的长航时和
一种反蜂群无人机地面破坏试验系统及方法.pdf
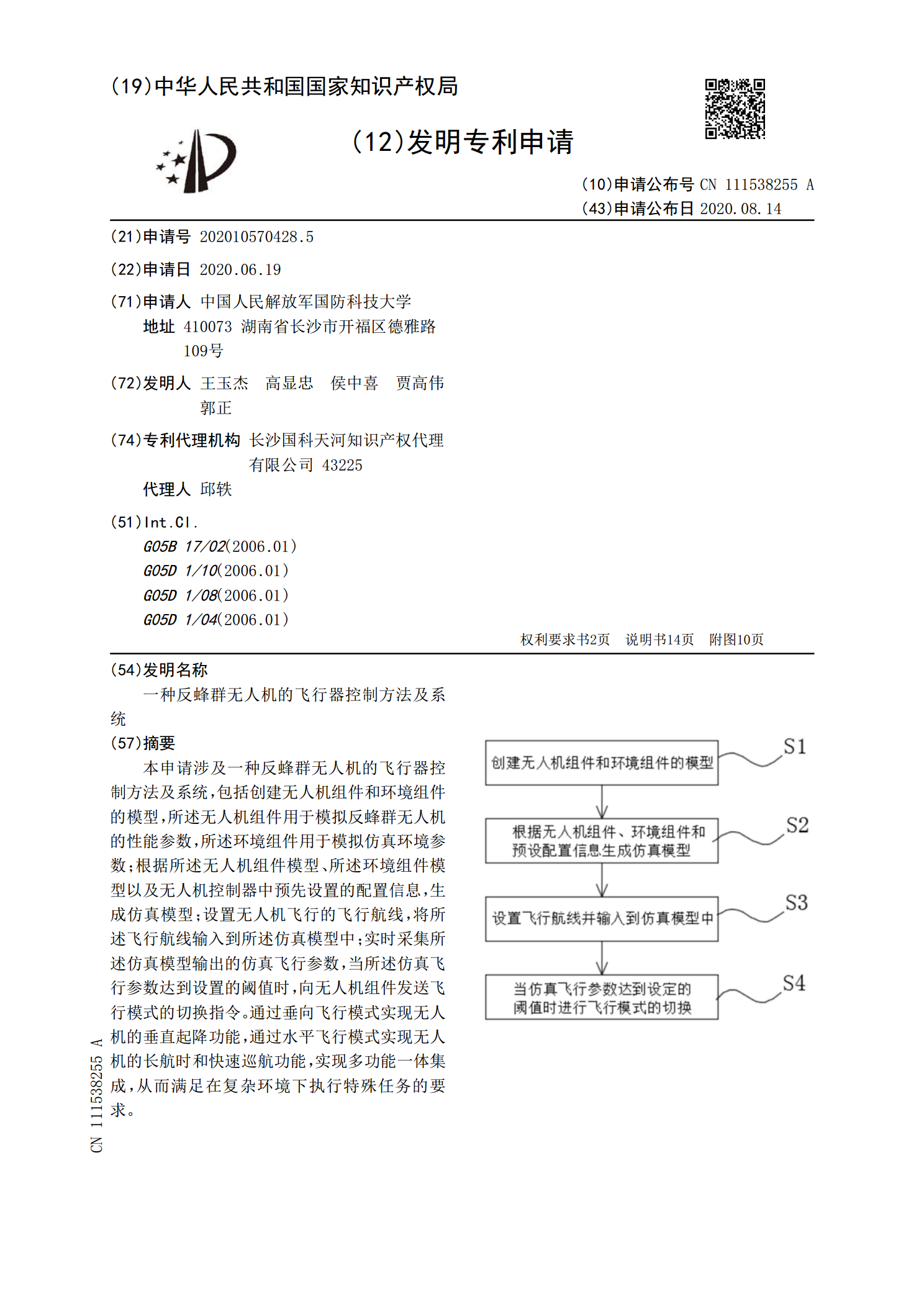
本发明公开一种反蜂群无人机地面破坏试验系统及方法,该系统以破坏装置来模拟反蜂群无人机搭载的打击破坏装置,以搭载了测试样品的搭载平台来模拟敌方无人机,并将搭载平台安装在弹射装置的滑轨上,滑轨的一端设置破坏装置,另一端设置弹射装置的弹射装置,弹射器弹射搭载有测试样品的搭载平台以使搭载平台沿滑轨向破坏装置滑动,从而成功模拟双方无人机在空中近距离接触的情景。在搭载平台与破坏装置近距离接触时,搭载平台上搭载的测试样品将被破坏装置破坏,通过测试样品被破坏的程度可有效判断反蜂群无人机的打击破坏装置设计是否合理。
一种无人机蜂群发射控制系统和方法.pdf
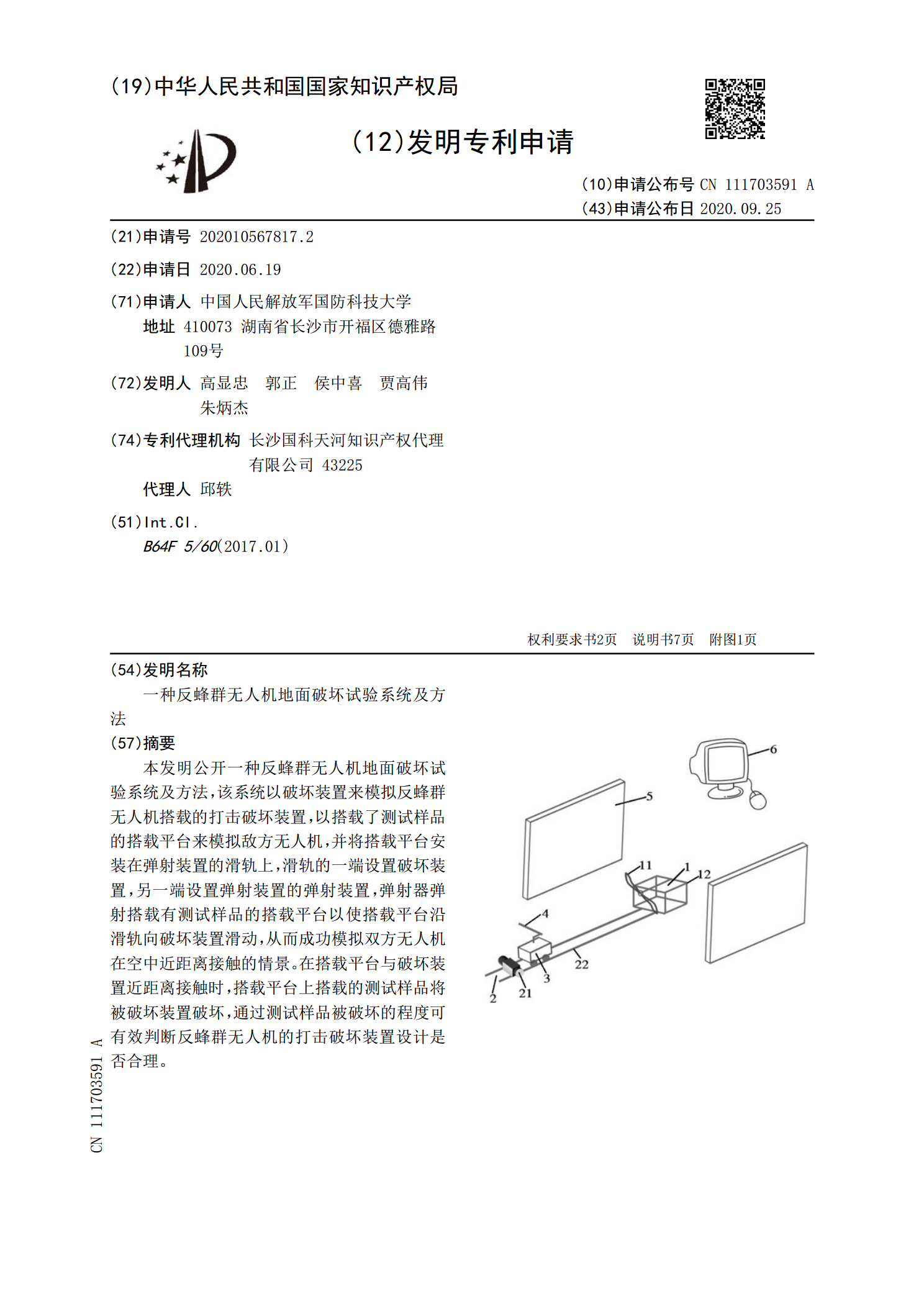
本发明提供一种无人机蜂群发射控制系统和方法,包括地面发射控制计算机、地面发射控制装置、信号电缆、发射控制电缆、发射时序计算装置和蜂群无人机,发射时序计算装置计算每架无人机的发射时间;发射控制计算机控制蜂群无人机多发齐射的发射控制流程;地面发射控制装置收集蜂群无人机的状态信息,控制所述蜂群无人机的工作流程;发射控制电缆连接地面发射控制装置与蜂群无人机,用于传输控制信号和供电功率。本发明实现了不同无人机在同一发射车/发射架上的发射,减少了发射车/发射架的使用,解决现有系统中每架无人机均需要单独的地面发射控制装

一种蜂群无人机系统.pdf
一种蜂群无人机系统,将参与执行任务的多个无人机按层次编成多个逻辑组,逻辑群组的形成和逻辑群组中无线对等节点设备的运行无需服务器参与,最小单位的逻辑组组成自组网络,其包括一个组长节点和多个组员节点,组长节点向每个组员节点广播信息,并与每个组员进行认证及通信,还向上一层次的管理节点上报本逻辑组的逻辑组成员及每个组员的相关信息;所述组员节点接收组长节点的广播信息,并根据接收的广播信息更改自己的网络配置及信道,还根据组长节点的命令执行任务。本发明提供的系统使参加执行任务的无人机能够协同执行任务,增强了执行任务的能
一种反蜂群无人机气动布局设计和性能评估方法.pdf
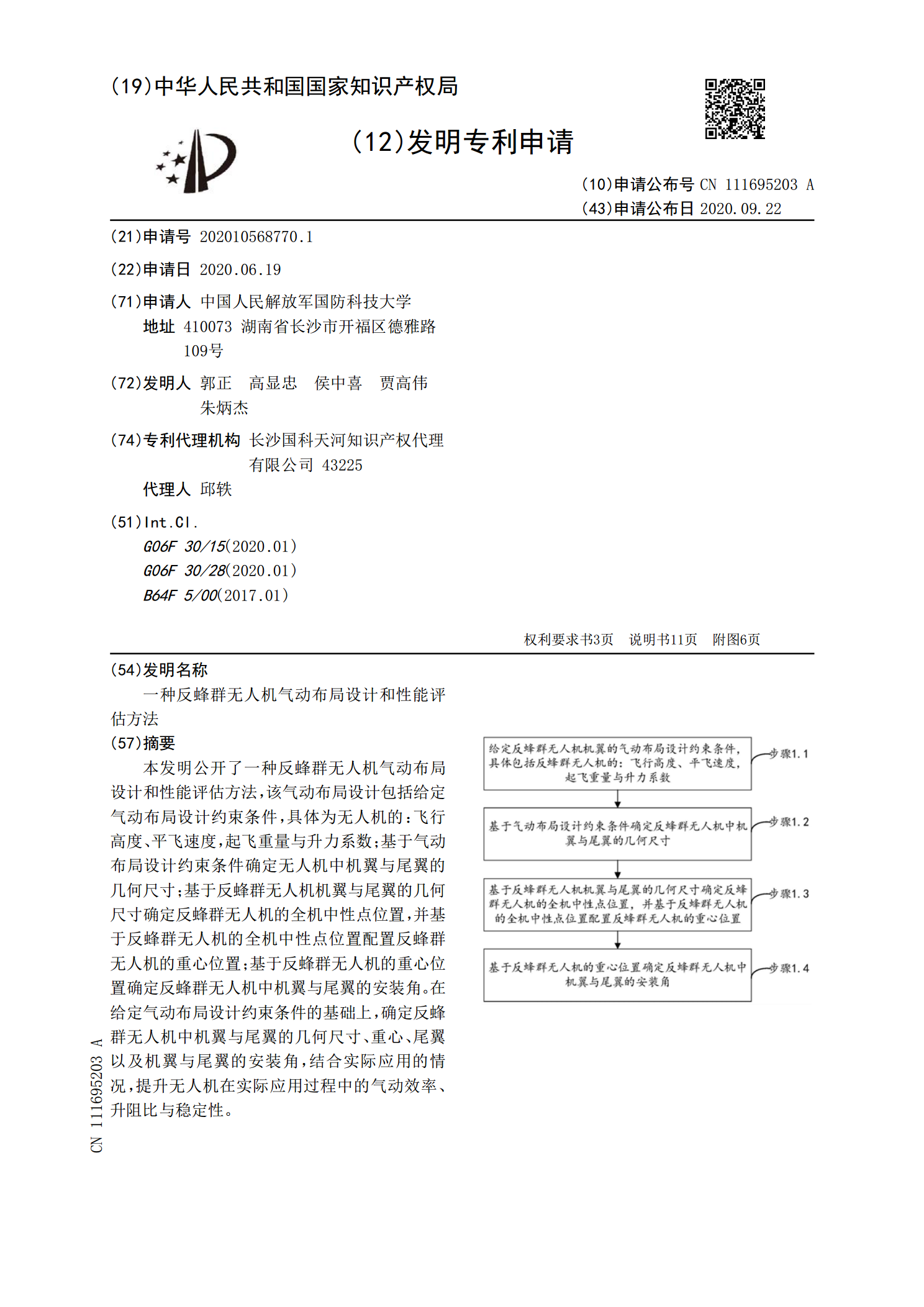
本发明公开了一种反蜂群无人机气动布局设计和性能评估方法,该气动布局设计包括给定气动布局设计约束条件,具体为无人机的:飞行高度、平飞速度,起飞重量与升力系数;基于气动布局设计约束条件确定无人机中机翼与尾翼的几何尺寸;基于反蜂群无人机机翼与尾翼的几何尺寸确定反蜂群无人机的全机中性点位置,并基于反蜂群无人机的全机中性点位置配置反蜂群无人机的重心位置;基于反蜂群无人机的重心位置确定反蜂群无人机中机翼与尾翼的安装角。在给定气动布局设计约束条件的基础上,确定反蜂群无人机中机翼与尾翼的几何尺寸、重心、尾翼以及机翼与尾翼