
一种风电轮毂自动打磨系统及打磨方法.pdf

一条****彩妍

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种风电轮毂自动打磨系统及打磨方法.pdf
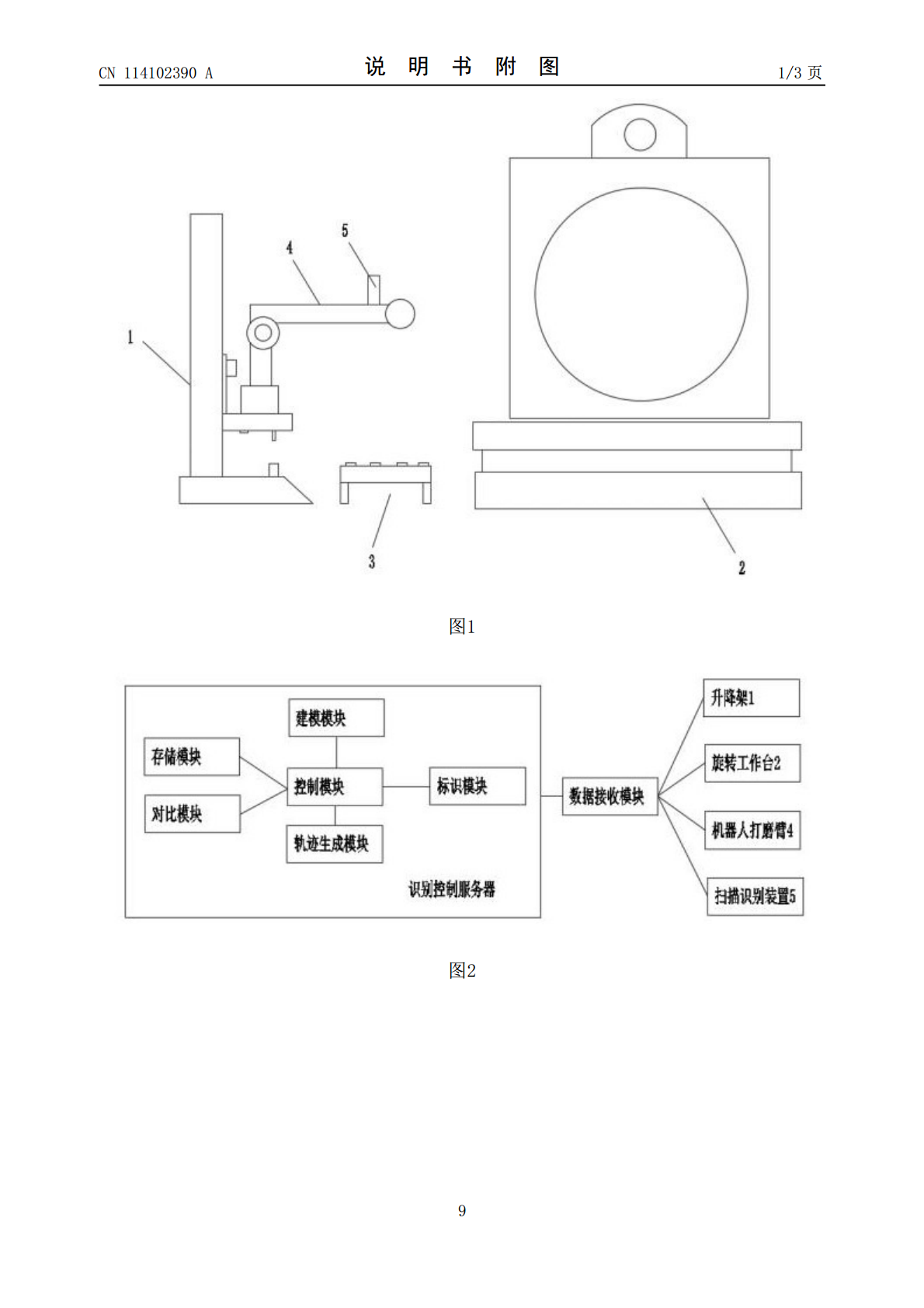
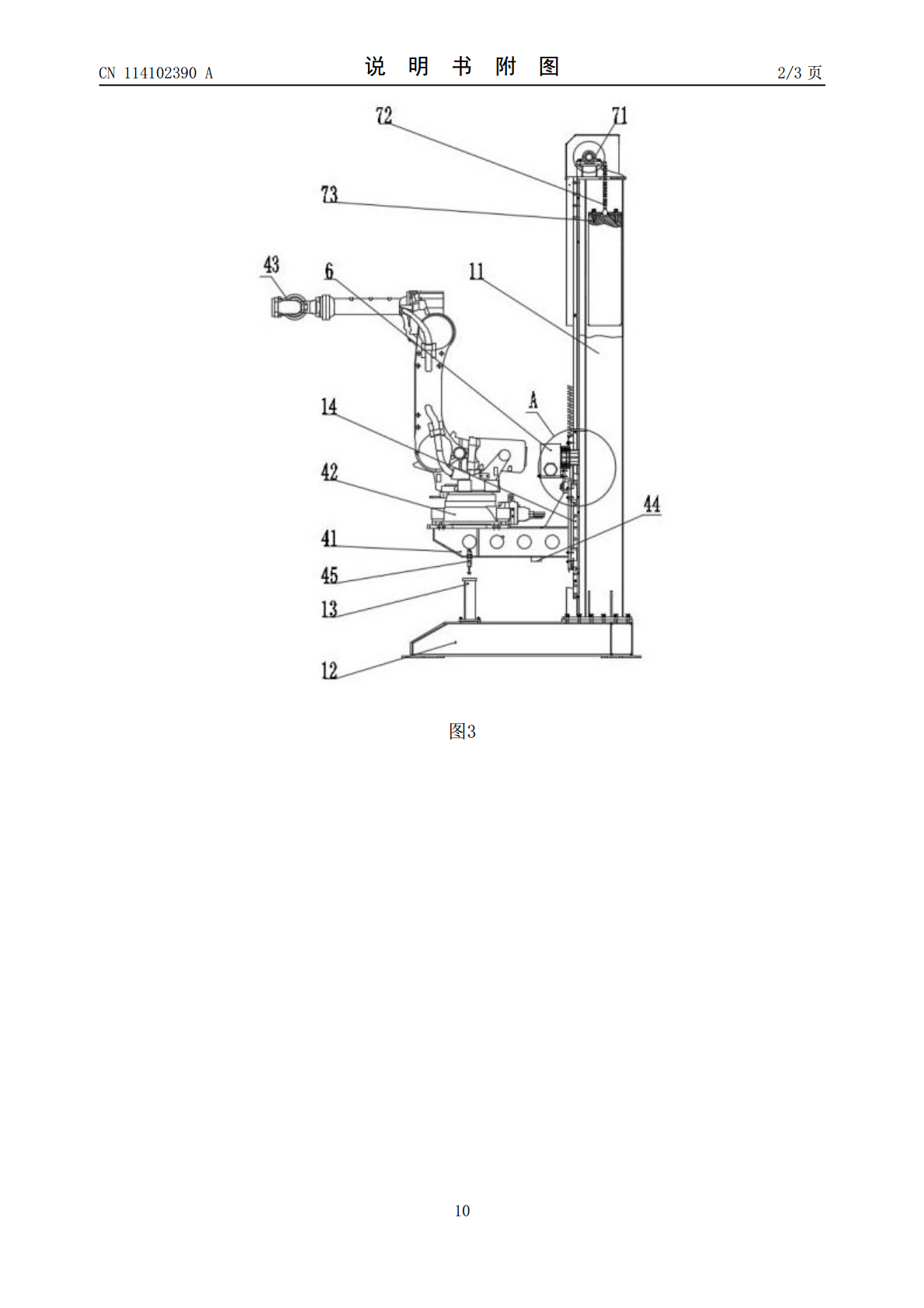
本发明公开了一种风电轮毂自动打磨系统,包括升降架、旋转工作台、刀库和机器人打磨臂,旋转工作台用于放置风电轮毂,还包括扫描识别装置及扫描识别控制服务器,扫描识别装置和恒力浮动装置安装在机器人打磨臂上,机器人打磨臂通过伺服行走驱动装置与伺服升降架滑动连接,行走驱动装置用于驱动机器人打磨臂沿着升降架上下移动。本发明智能打磨系统能够使机器人打磨臂自适应工件智能生成打磨轨迹,控制打磨精度,有效克服了风电轮毂等多曲面大型工件来料一致性差,打磨难,效率低,精度差的顽疾。

一种轮毂自动打磨方法及装置.pdf
一种轮毂自动打磨方法及装置,属于铝轮加工装置领域。现有人工处理轮毂毛坯飞边存在的处理麻烦、劳动强度大等缺陷。本发明通过使用由带有动力装置的主轴箱驱动旋转并安装于其主轴上的磨头作为打磨工具,先将轮毂毛坯轴向成横向固定,使用安装在主轴箱上的视觉系统摄像机从横向正面摄取轮毂毛坯图像,与视觉系统内预存的标准轮毂图像比较,得出待打磨加工部位,控制系统根据待打磨部位的参数,调用控制系统预存的数控加工子程序自动组合成完整的数控加工程序,控制伺服驱动装置,使磨头到达打磨位置,并沿数控程序设定的运动轨迹连续打磨待打磨加工部
一种圆形刀片自动打磨系统及其打磨方法.pdf
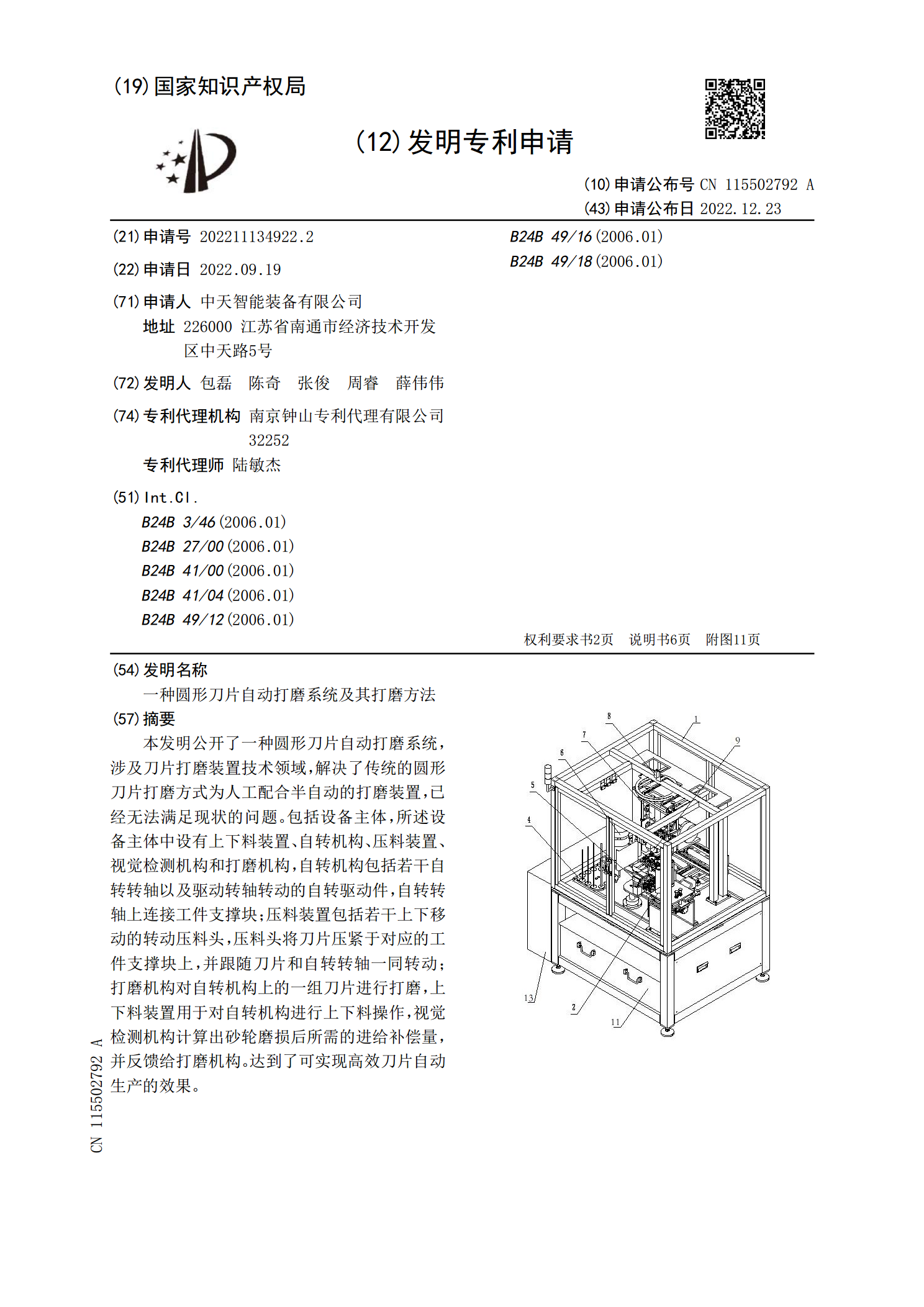
本发明公开了一种圆形刀片自动打磨系统,涉及刀片打磨装置技术领域,解决了传统的圆形刀片打磨方式为人工配合半自动的打磨装置,已经无法满足现状的问题。包括设备主体,所述设备主体中设有上下料装置、自转机构、压料装置、视觉检测机构和打磨机构,自转机构包括若干自转转轴以及驱动转轴转动的自转驱动件,自转转轴上连接工件支撑块;压料装置包括若干上下移动的转动压料头,压料头将刀片压紧于对应的工件支撑块上,并跟随刀片和自转转轴一同转动;打磨机构对自转机构上的一组刀片进行打磨,上下料装置用于对自转机构进行上下料操作,视觉检测机构

一种汽车轮毂自动打磨抛光系统.pdf
本发明为一种汽车轮毂自动打磨抛光系统,包括打磨抛光工作台、设置于待磨抛汽车轮毂上方的可伸缩的磨抛视觉检测装置、固定在打磨抛光工作台上的用于夹持固定待磨抛汽车轮毂的夹持装置、六自由度工业机器人、设置于工业机器人腕关节上的打磨抛光末端及用于控制系统工作的控制柜,在打磨抛光工作台上还设有用于盛放多种加工刀具的轮毂磨抛刀具库,所述夹持装置能对汽车轮毂的加工角度及加工位置进行调整。该系统采用六自由度工业机器人配合气动浮动打磨主轴,大大增加的本系统打磨抛光末端的柔性和灵活性,本发明设置有自己的轮毂磨抛刀具库,可根据需

车轮轮毂打磨系统.pdf
本发明公开了一种车轮轮毂打磨系统,包括工业机器人、设置于工业机器人上且用于对轮毂进行打磨的打磨组件、用于将轮毂输送至打磨工位处的输送装置和设置于打磨工位处且用于实现轮毂固定的定位装置。本发明的车轮轮毂打磨系统,可以提高打磨工作效率,减少人力的成本,可以很大程度上提高轮毂的打磨质量,可以实现较为复杂的打磨姿态并且可以到达较远位置,处理较为复杂的轮毂打磨区域。