
一种栅格图下的基于混合算法的无人船路径规划方法.pdf

梅雪****67

1/10
2/10
3/10
4/10
5/10

6/10
7/10
8/10
9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种栅格图下的基于混合算法的无人船路径规划方法.pdf
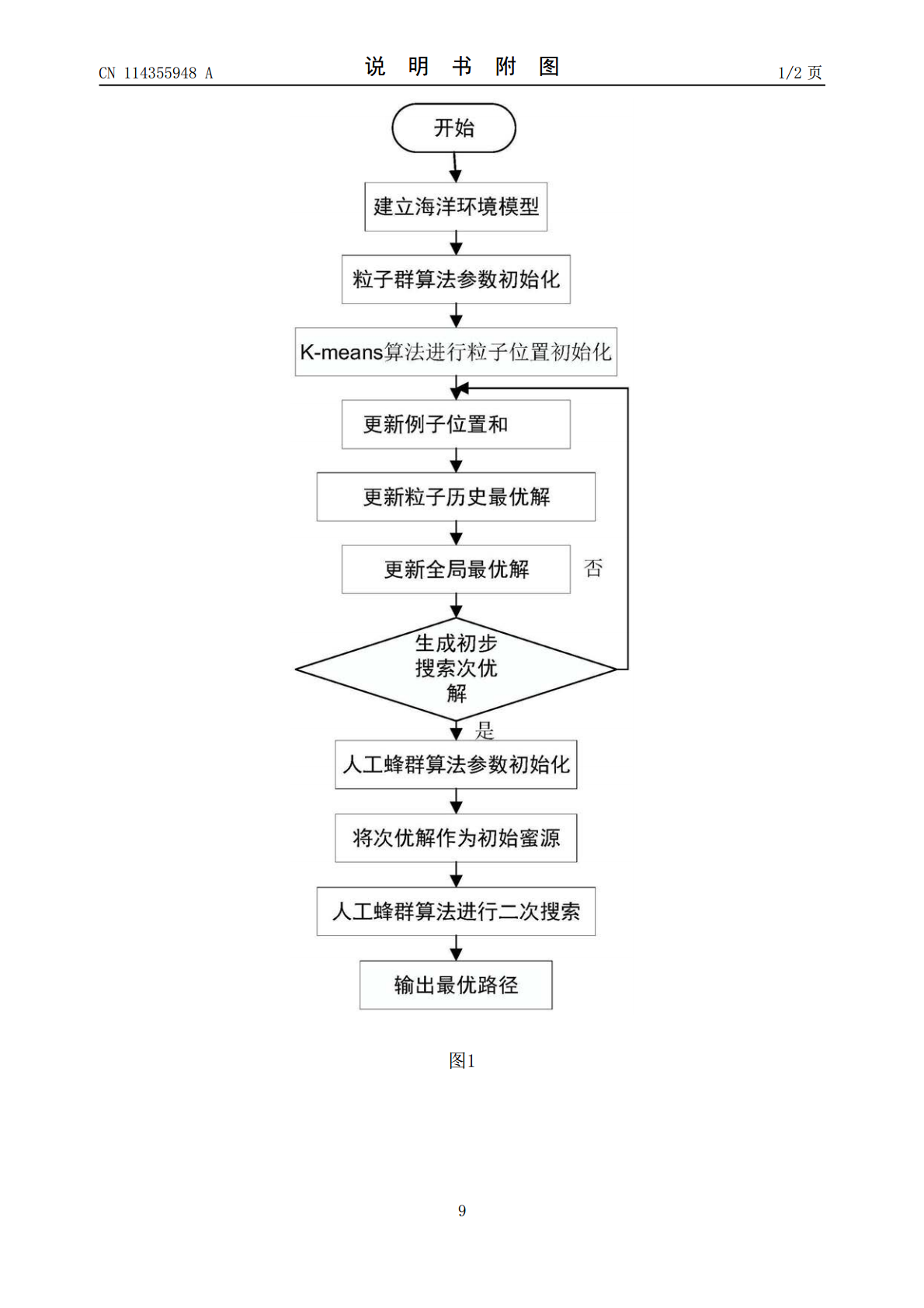
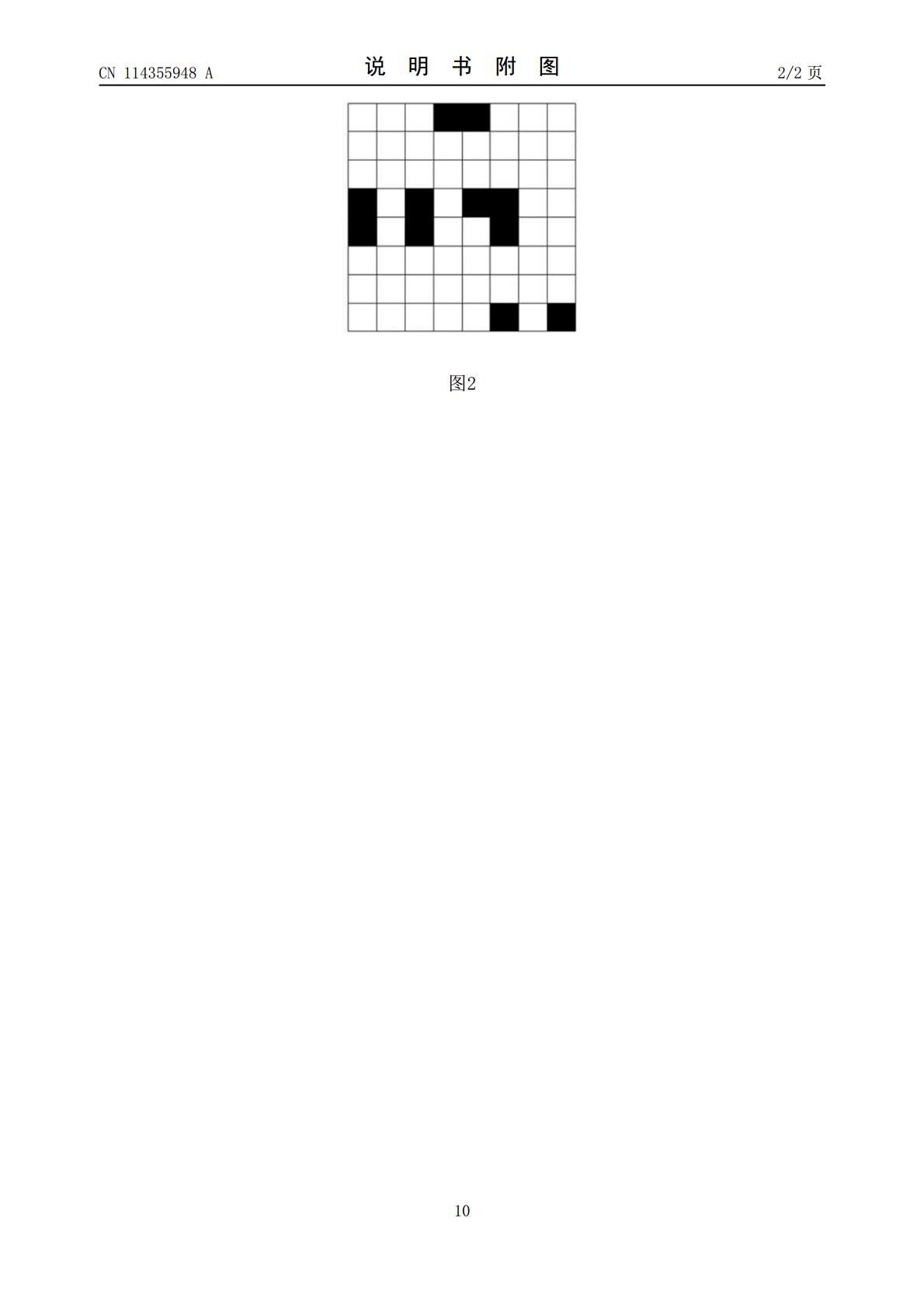
本发明提供一种栅格图下的基于混合算法的无人船路径规划方法,以人工蜂群算法为基础算法,首先通过在粒子群中引入K‑means算法对粒子进行初始化设置,经过粒子群算法计算得出全局最优解;然后以粒子群算法得出的全局最优解作为人工蜂群算法的初始蜂源位置进行二次搜索,在人工蜂群算法运行过程中引入禁忌搜索策略避免重复搜索;最后通过循环计算获得获得全局最优解,即一条距离最短、平滑度最优的路径。本发明的方法规划出来的无人船航行路径的距离更短,使得航行成本低具有经济型。且规划的路径平滑度更优,使得航行环境更加安全,更加符合无
一种基于混合粒子群算法的无人船路径优化方法和系统.pdf
本发明实施例提供一种基于混合粒子群算法的无人船路径优化方法和系统,以无人船当前规划路径中各路径点为基础,同时考虑多点约束和规避障碍物等自然条件约束,重新进行路径点划分,综合考虑路径长度、路径平滑度和路径安全性,实现路径长度、路径平滑度和路径安全性的多目标优化,从而规划出一条符合无人船航行实际的全局路径。
一种基于改进栅格法的无人机巡逻路径规划方法.pdf
本发明属于无人机路径规划技术领域,具体地说,是一种基于改进栅格法的无人机巡逻路径规划方法,为了克服传统栅格法的信息单一不符合实际和确定性算法的局部最优的缺陷,解决环境信息复杂时变、突发情况应急处理、周期巡逻覆盖和隐患消除跟踪等问题,本发明通过优化现有栅格建模方法构建无人机安全风险区划图、重点区域等级区划图和无人机航行速度与探测距离区划图,生成巡逻区域环境信息与速度分布区划图,由任务控制中心进行战术选择,将静态规划与动态规划结合、区域规划与速度规划结合,进而满足约束条件完成路径优化任务。本发明在无人机规划的
基于地图栅格与QPSO算法结合的机器人路径规划方法.pdf
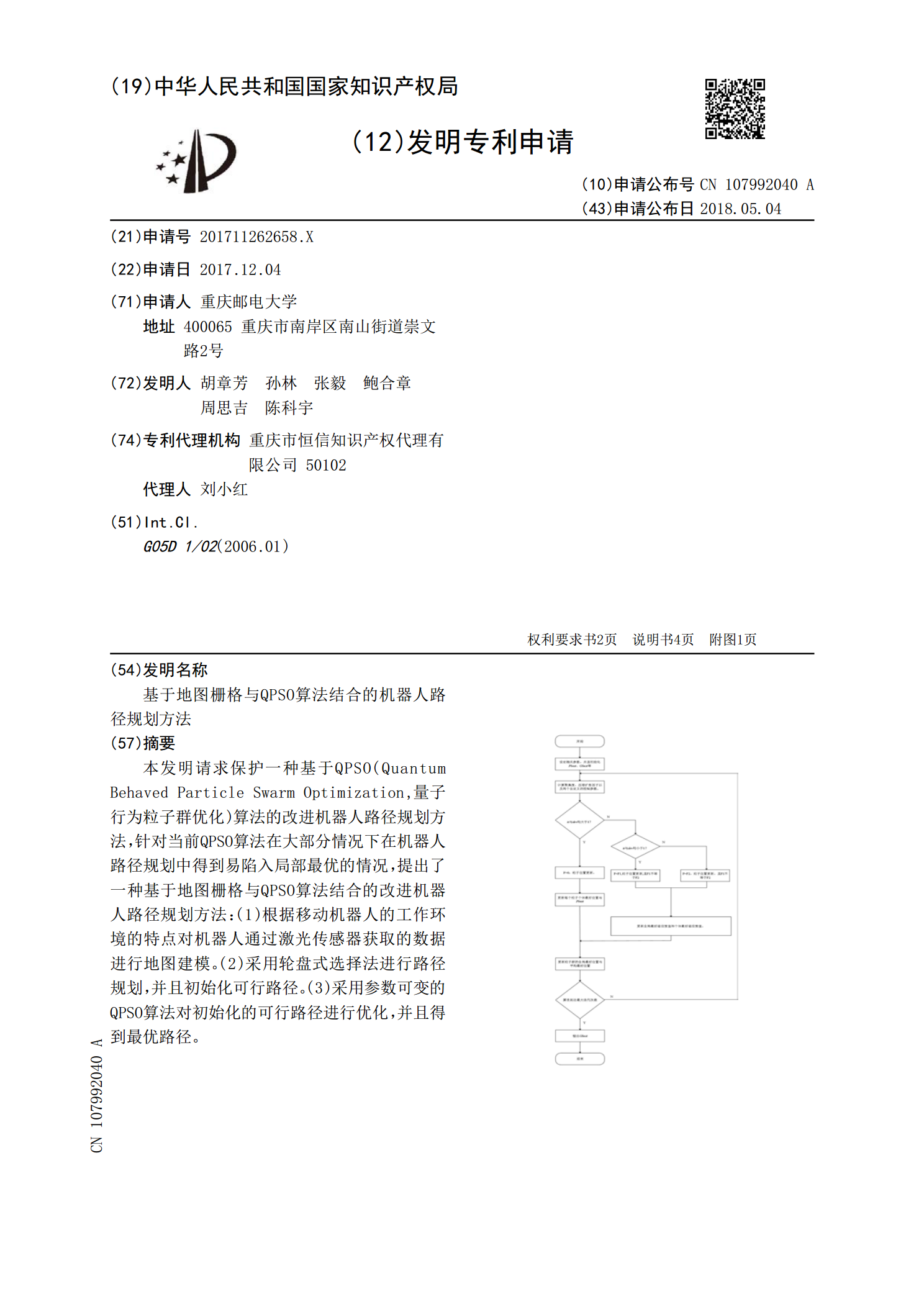
本发明请求保护一种基于QPSO(QuantumBehavedParticleSwarmOptimization,量子行为粒子群优化)算法的改进机器人路径规划方法,针对当前QPSO算法在大部分情况下在机器人路径规划中得到易陷入局部最优的情况,提出了一种基于地图栅格与QPSO算法结合的改进机器人路径规划方法:(1)根据移动机器人的工作环境的特点对机器人通过激光传感器获取的数据进行地图建模。(2)采用轮盘式选择法进行路径规划,并且初始化可行路径。(3)采用参数可变的QPSO算法对初始化的可行路径进行优化
无人船路径规划方法及系统.pdf
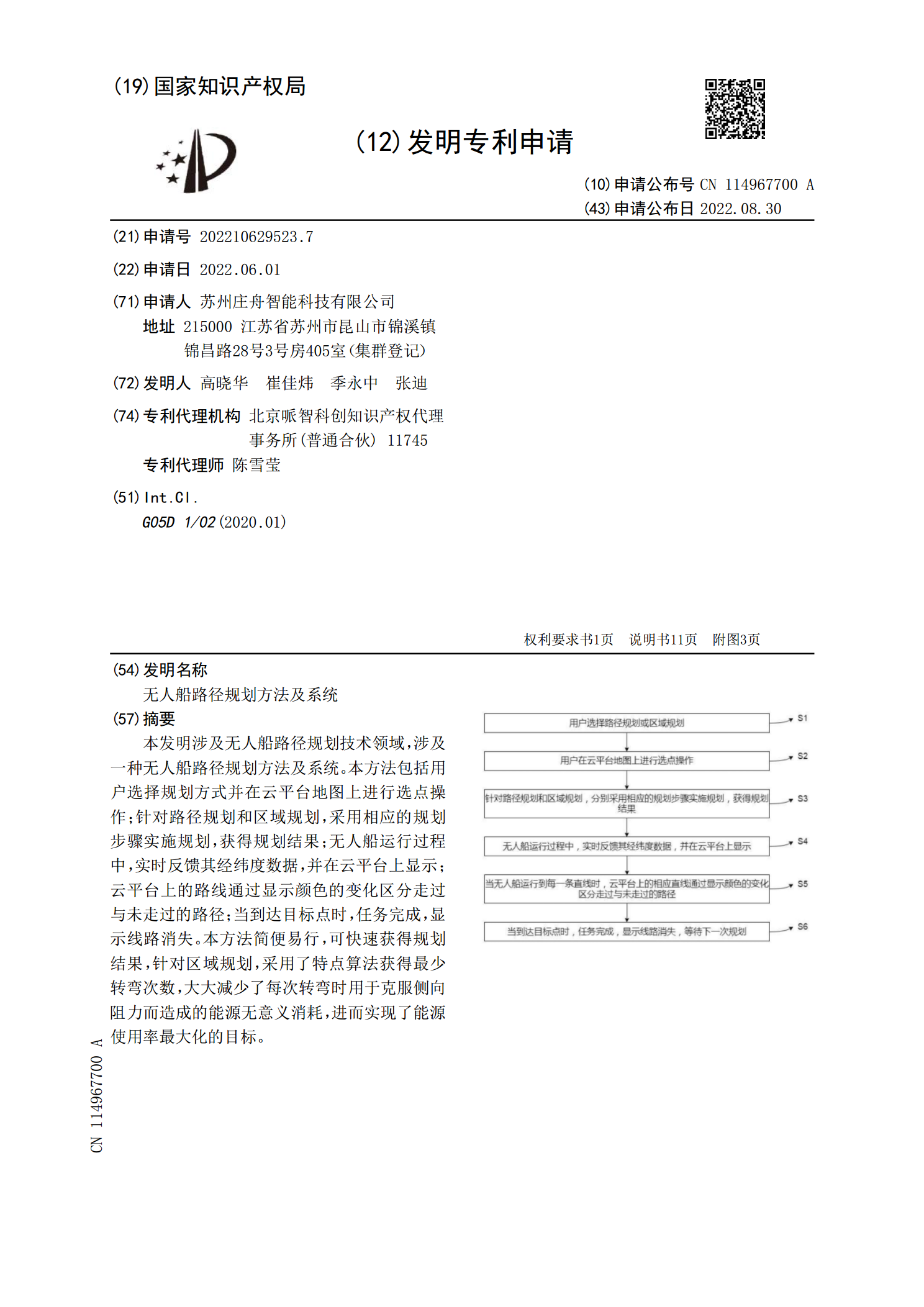
本发明涉及无人船路径规划技术领域,涉及一种无人船路径规划方法及系统。本方法包括用户选择规划方式并在云平台地图上进行选点操作;针对路径规划和区域规划,采用相应的规划步骤实施规划,获得规划结果;无人船运行过程中,实时反馈其经纬度数据,并在云平台上显示;云平台上的路线通过显示颜色的变化区分走过与未走过的路径;当到达目标点时,任务完成,显示线路消失。本方法简便易行,可快速获得规划结果,针对区域规划,采用了特点算法获得最少转弯次数,大大减少了每次转弯时用于克服侧向阻力而造成的能源无意义消耗,进而实现了能源使用率最大