
一种基于混合粒子群算法的无人船路径优化方法和系统.pdf

靖烟****魔王

1/10
2/10
3/10

4/10
5/10
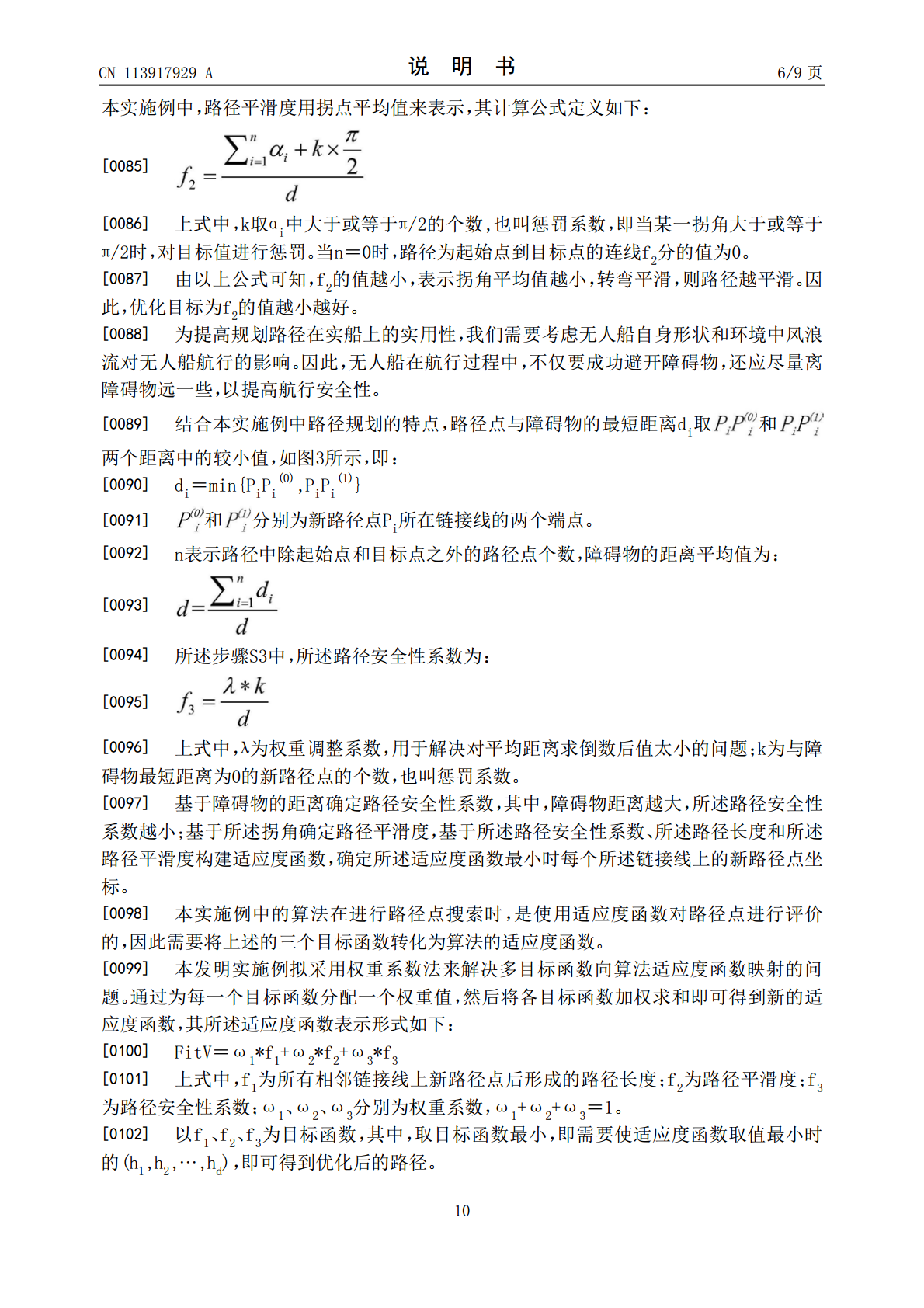
6/10
7/10
8/10
9/10
10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于混合粒子群算法的无人船路径优化方法和系统.pdf
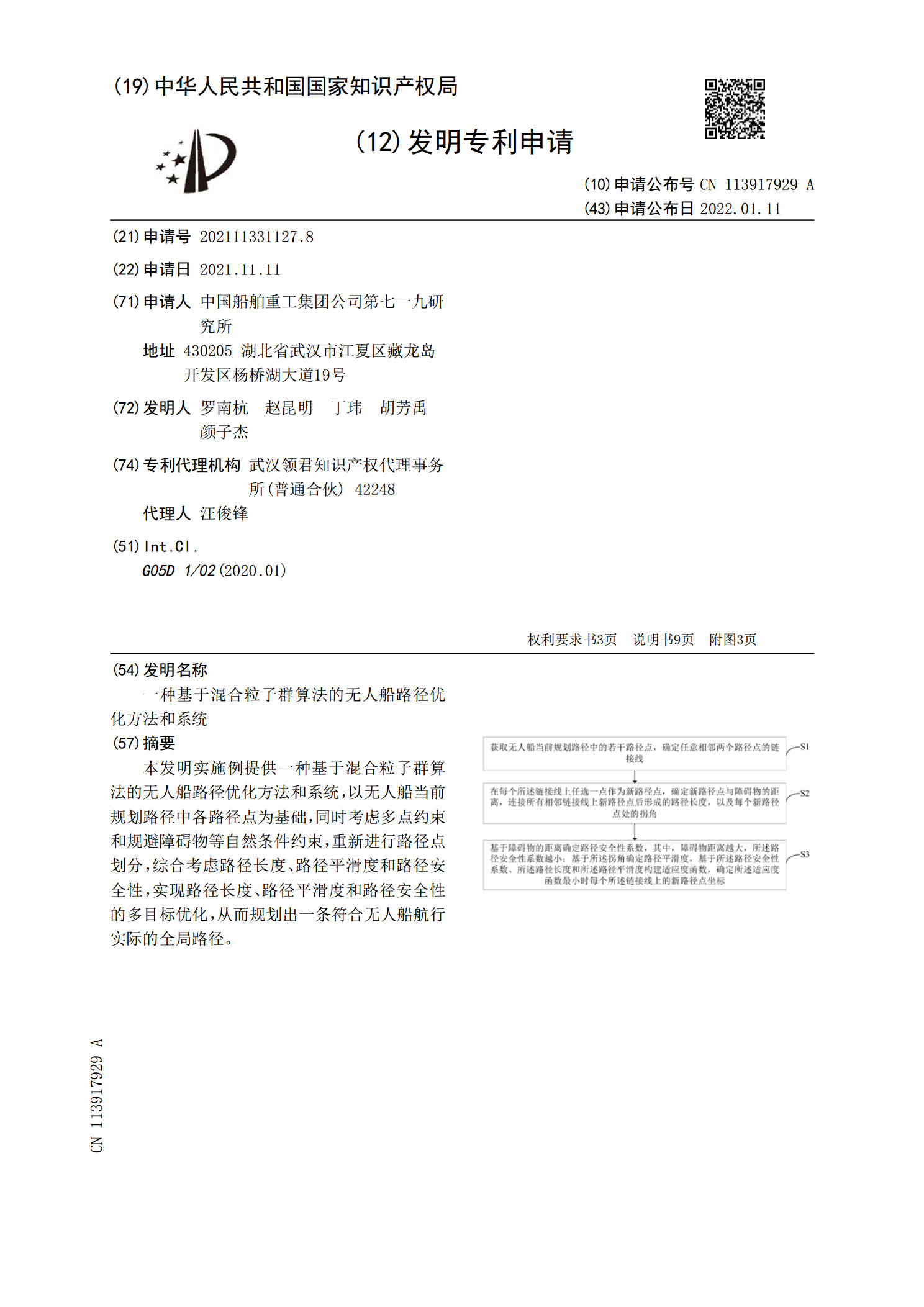
本发明实施例提供一种基于混合粒子群算法的无人船路径优化方法和系统,以无人船当前规划路径中各路径点为基础,同时考虑多点约束和规避障碍物等自然条件约束,重新进行路径点划分,综合考虑路径长度、路径平滑度和路径安全性,实现路径长度、路径平滑度和路径安全性的多目标优化,从而规划出一条符合无人船航行实际的全局路径。
一种基于多目标优化的无人船路径优化方法和系统.pdf
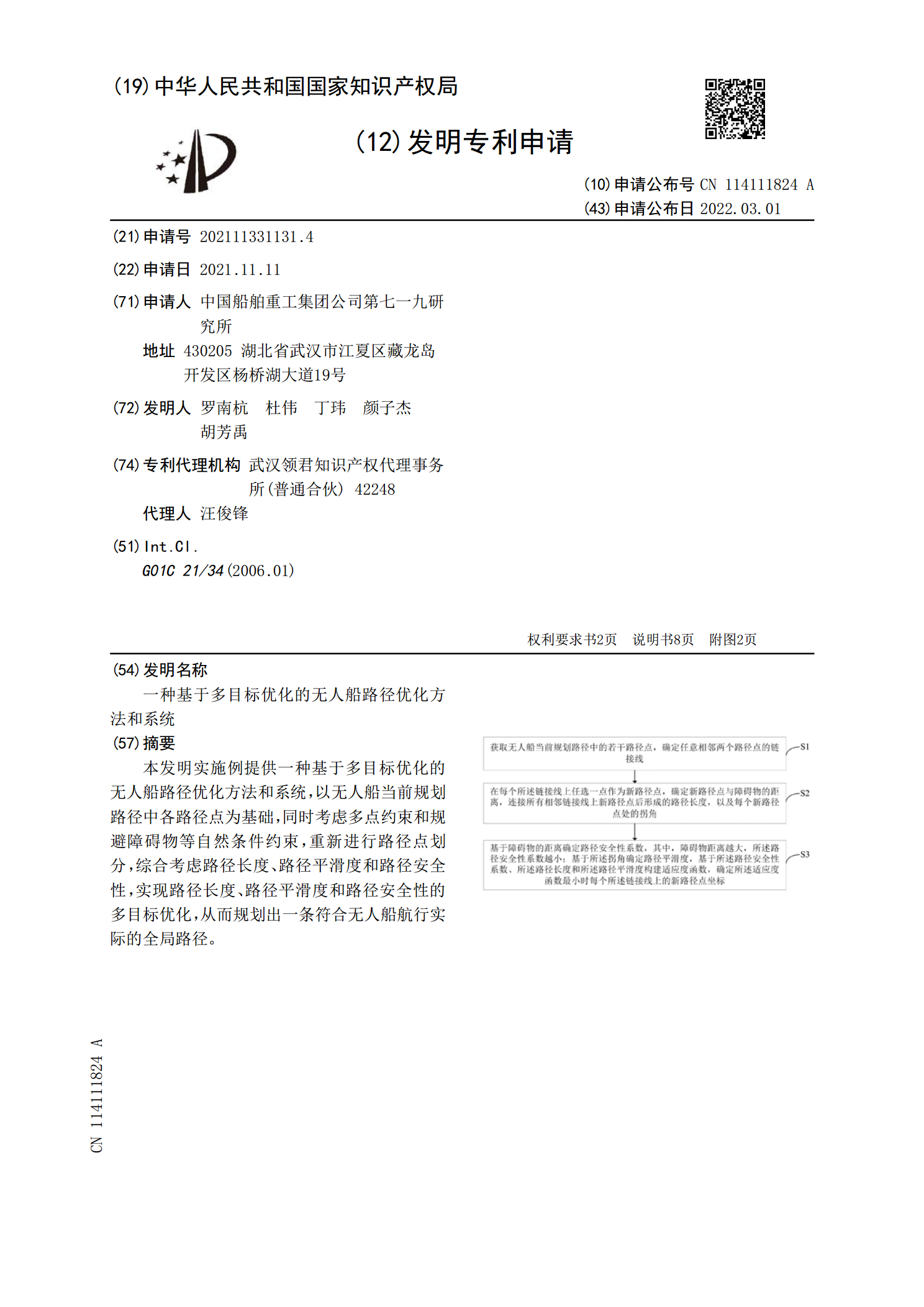
本发明实施例提供一种基于多目标优化的无人船路径优化方法和系统,以无人船当前规划路径中各路径点为基础,同时考虑多点约束和规避障碍物等自然条件约束,重新进行路径点划分,综合考虑路径长度、路径平滑度和路径安全性,实现路径长度、路径平滑度和路径安全性的多目标优化,从而规划出一条符合无人船航行实际的全局路径。

基于粒子群优化算法与极限环法的无人机混合路径规划的开题报告.docx
基于粒子群优化算法与极限环法的无人机混合路径规划的开题报告一、选题背景随着科技的不断进步和发展,无人机在军事、民用等领域的应用越来越广泛。而无人机的混合路径规划问题,即同时考虑直线飞行和环绕飞行的路径规划问题,是无人机应用中的一个重要问题。针对这一问题,许多学者和研究人员提出了各种优化方法和算法。其中,粒子群优化算法和极限环法是两种比较常用的方法。但是,这两种方法各有优缺点,在应用中也存在一些问题,如粒子群优化算法容易陷入局部最优解,极限环法对系统要求较高等。因此,本论文旨在将粒子群优化算法和极限环法相结
一种栅格图下的基于混合算法的无人船路径规划方法.pdf
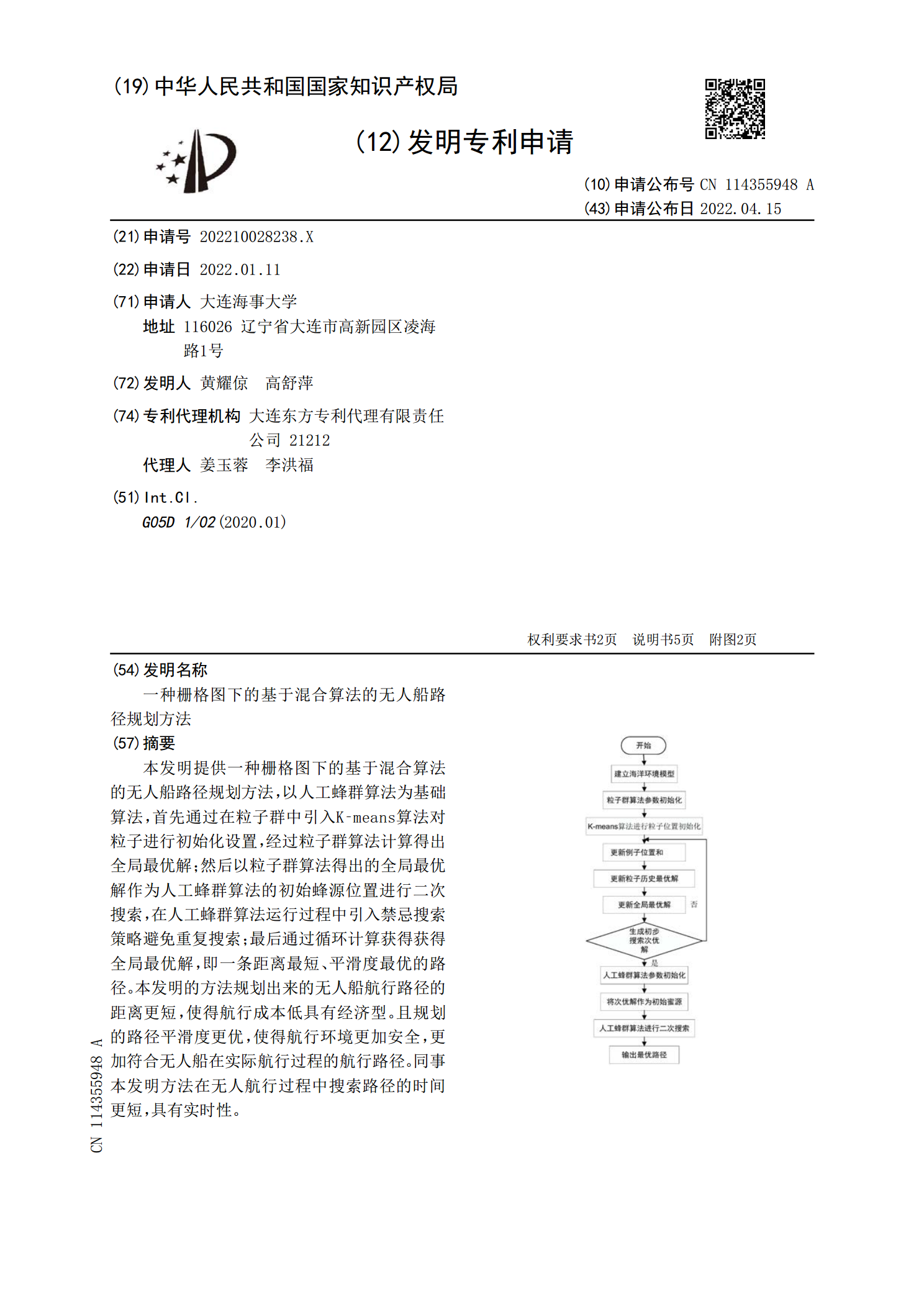
本发明提供一种栅格图下的基于混合算法的无人船路径规划方法,以人工蜂群算法为基础算法,首先通过在粒子群中引入K‑means算法对粒子进行初始化设置,经过粒子群算法计算得出全局最优解;然后以粒子群算法得出的全局最优解作为人工蜂群算法的初始蜂源位置进行二次搜索,在人工蜂群算法运行过程中引入禁忌搜索策略避免重复搜索;最后通过循环计算获得获得全局最优解,即一条距离最短、平滑度最优的路径。本发明的方法规划出来的无人船航行路径的距离更短,使得航行成本低具有经济型。且规划的路径平滑度更优,使得航行环境更加安全,更加符合无

基于混合粒子群算法的仓储系统优化研究的中期报告.docx
基于混合粒子群算法的仓储系统优化研究的中期报告一、研究背景和意义随着物流业的迅速发展和仓储需求的日益增长,仓储系统的优化问题变得越来越重要。为了最大化仓储系统的效率和经济效益,需要通过合理的规划和管理降低成本、提高生产率和服务质量。仓储系统优化问题是一个典型的多目标、多约束的优化问题,而混合粒子群算法是一种适用于多维优化问题的全局优化算法,因此可以应用于仓储系统优化问题中。二、研究目的和内容本研究旨在基于混合粒子群算法对仓储系统进行优化研究。具体包括以下内容:1.建立仓储系统模型,包含仓库数量、存储货物种