
一种基于改进栅格法的无人机巡逻路径规划方法.pdf

建英****66

1/10
2/10
3/10
4/10
5/10
6/10

7/10
8/10
9/10
10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于改进栅格法的无人机巡逻路径规划方法.pdf
本发明属于无人机路径规划技术领域,具体地说,是一种基于改进栅格法的无人机巡逻路径规划方法,为了克服传统栅格法的信息单一不符合实际和确定性算法的局部最优的缺陷,解决环境信息复杂时变、突发情况应急处理、周期巡逻覆盖和隐患消除跟踪等问题,本发明通过优化现有栅格建模方法构建无人机安全风险区划图、重点区域等级区划图和无人机航行速度与探测距离区划图,生成巡逻区域环境信息与速度分布区划图,由任务控制中心进行战术选择,将静态规划与动态规划结合、区域规划与速度规划结合,进而满足约束条件完成路径优化任务。本发明在无人机规划的
一种基于改进势场栅格的机器人路径规划方法.pdf
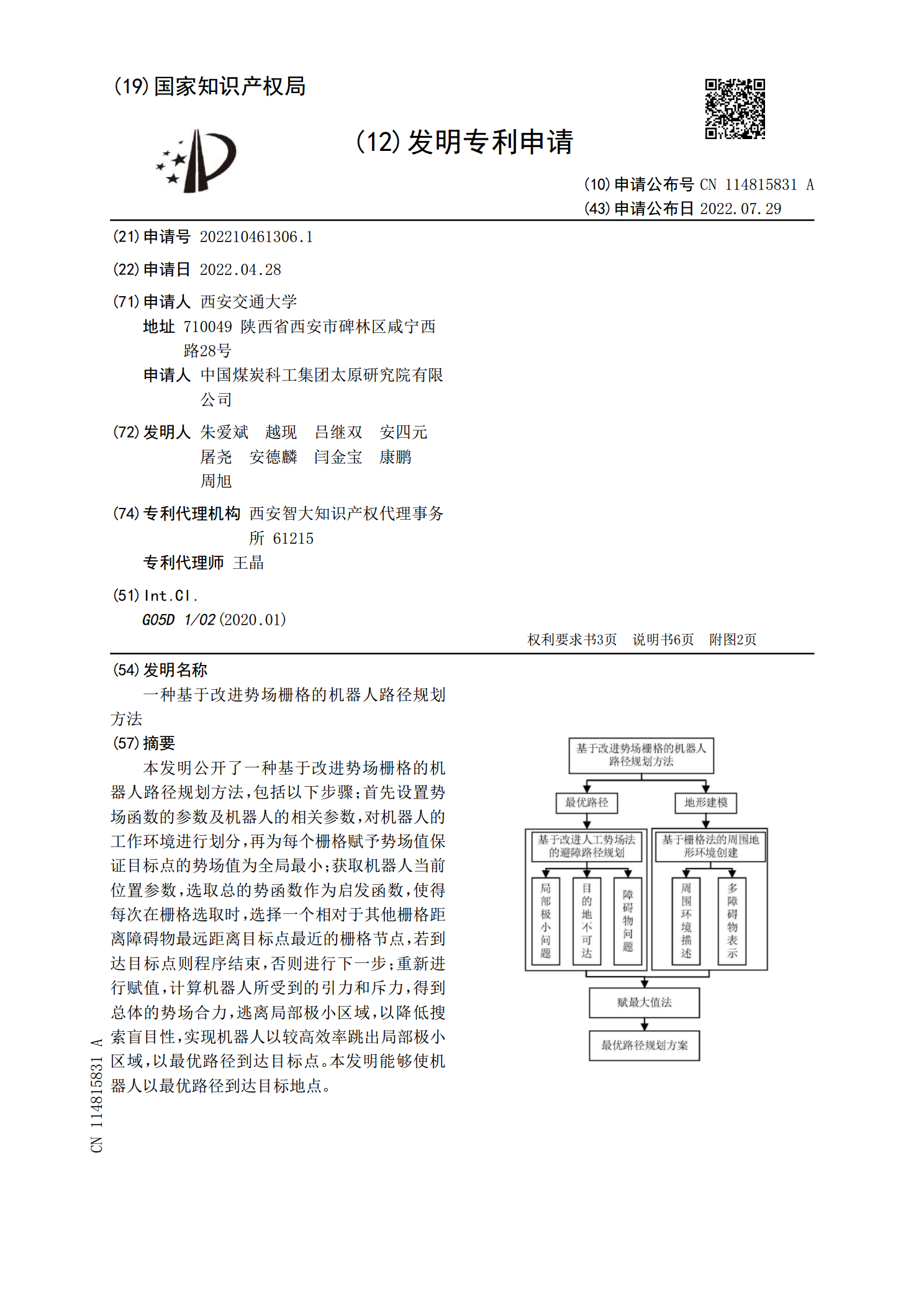
本发明公开了一种基于改进势场栅格的机器人路径规划方法,包括以下步骤;首先设置势场函数的参数及机器人的相关参数,对机器人的工作环境进行划分,再为每个栅格赋予势场值保证目标点的势场值为全局最小;获取机器人当前位置参数,选取总的势函数作为启发函数,使得每次在栅格选取时,选择一个相对于其他栅格距离障碍物最远距离目标点最近的栅格节点,若到达目标点则程序结束,否则进行下一步;重新进行赋值,计算机器人所受到的引力和斥力,得到总体的势场合力,逃离局部极小区域,以降低搜索盲目性,实现机器人以较高效率跳出局部极小区域,以最优
一种基于栅格地图模型的改进AGV路径规划算法.pdf
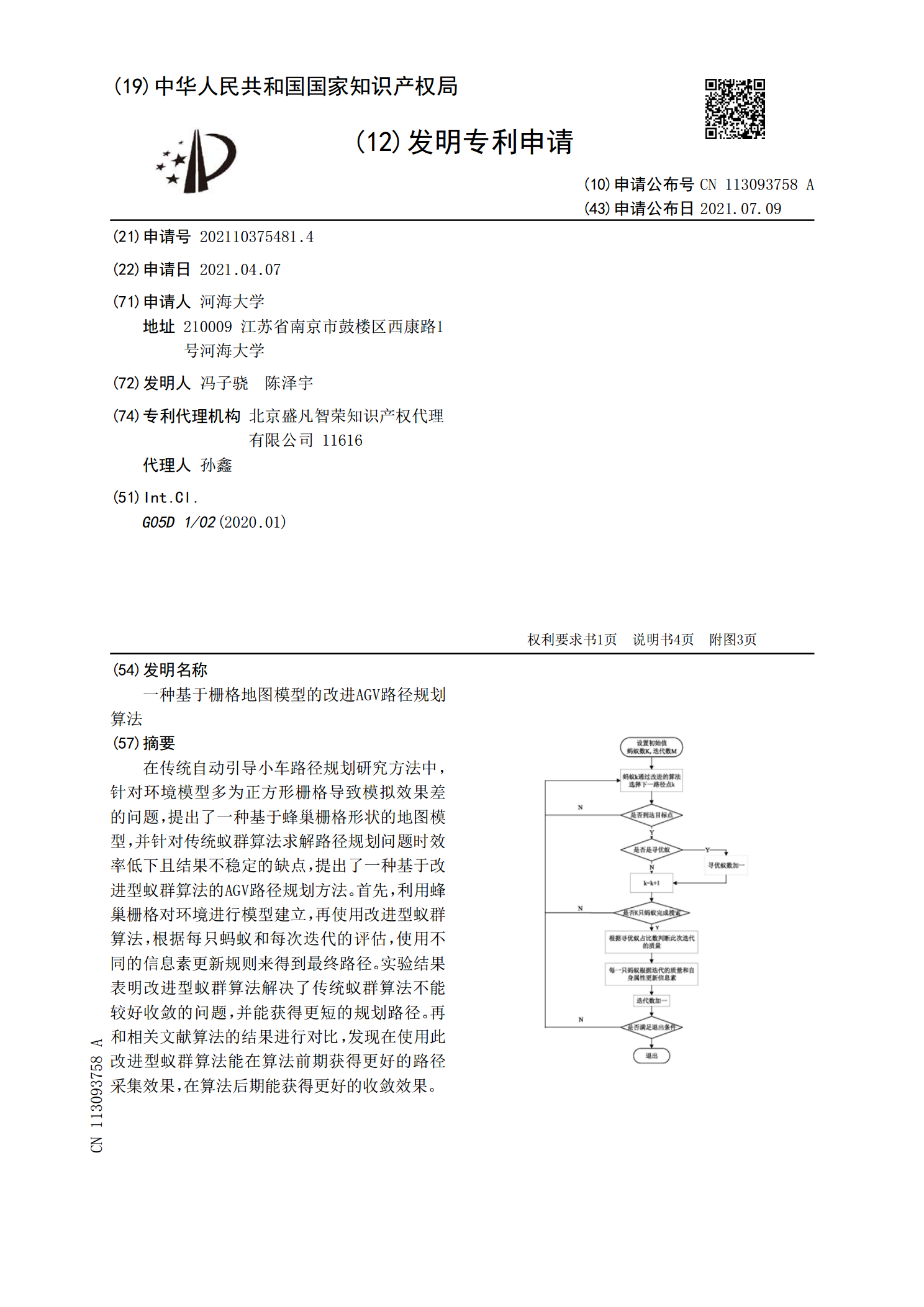
在传统自动引导小车路径规划研究方法中,针对环境模型多为正方形栅格导致模拟效果差的问题,提出了一种基于蜂巢栅格形状的地图模型,并针对传统蚁群算法求解路径规划问题时效率低下且结果不稳定的缺点,提出了一种基于改进型蚁群算法的AGV路径规划方法。首先,利用蜂巢栅格对环境进行模型建立,再使用改进型蚁群算法,根据每只蚂蚁和每次迭代的评估,使用不同的信息素更新规则来得到最终路径。实验结果表明改进型蚁群算法解决了传统蚁群算法不能较好收敛的问题,并能获得更短的规划路径。再和相关文献算法的结果进行对比,发现在使用此改进型蚁群

一种基于改进袋獾优化算法的无人机路径规划方法.pdf
一种基于改进袋獾优化算法的无人机路径规划方法,包括步骤:S1、构建三维地图模型进行初始化;S2、设置起点、终点及约束条件;S3、基于改进袋獾算法进行初步的路径规划;S4、根据算法得到的散点拟合成光滑曲线形成路径;S5、多次迭代算法,寻找到最优路径并输出,根据最新的全局路径规划,到达目的地。本发明可以提高算法的收敛速度和收敛精度,使其更不易陷入局部最优,能合理地规划出飞行轨迹,使无人机安全地到达目的地。
一种基于改进人工蜂群算法的无人机路径规划方法及系统.pdf
本发明公开了一种基于改进人工蜂群算法的无人机路径规划方法及系统,属于无人机航迹规划技术领域;该方法包括以下步骤:S1:使用获取地图信息模块,获取待预测地区地图信息,建立数学模型;S2:根据无人机飞行环境以及自身条件构建代价函数;S3:根据人工蜂群算法与灰狼算法相结合的无人机路径规划方法规划全局最优路径。本发明通过结合灰狼算法思想,利用改进灰狼算法强大的局部搜索能力以及多维搜索的优势提高了算法收敛速度;引入精英个体概念平衡算法的开发与探索能力,提高了算法的收敛精度;引入基于动态评价策略的改进轮盘赌法,保证了