
一种蜂群无人机空中撞绳回收系统.pdf

海昌****姐淑


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种蜂群无人机空中撞绳回收系统.pdf
本发明公布了一种蜂群无人机空中撞绳回收系统及回收方法,该回收系统由回收母机、绞盘机构、回收绳、空气舵、回收锁环组成。绞盘机构安装在母机地板上,绞盘轴与机身纵轴垂直。当回收无人机时,母机到达指定回收空域附近后,在回收空域附近盘旋等待,同时放出回收绳。蜂群无人机则通过调整速度和姿态从侧后方接近母机,并用一侧机翼撞击回收绳,导致无人机绕撞击点向前旋转,从而使回收绳沿机翼前缘滑向翼稍,并撞开位于翼稍的回收锁环的锁舌后,滑入锁环内,随后锁舌在弹簧扭力作用下复位,将无人机锁套在回收绳上,从而完成一架无人机的回收。同样
一种基于空中母舰抛投的蜂群无人机部署系统.pdf
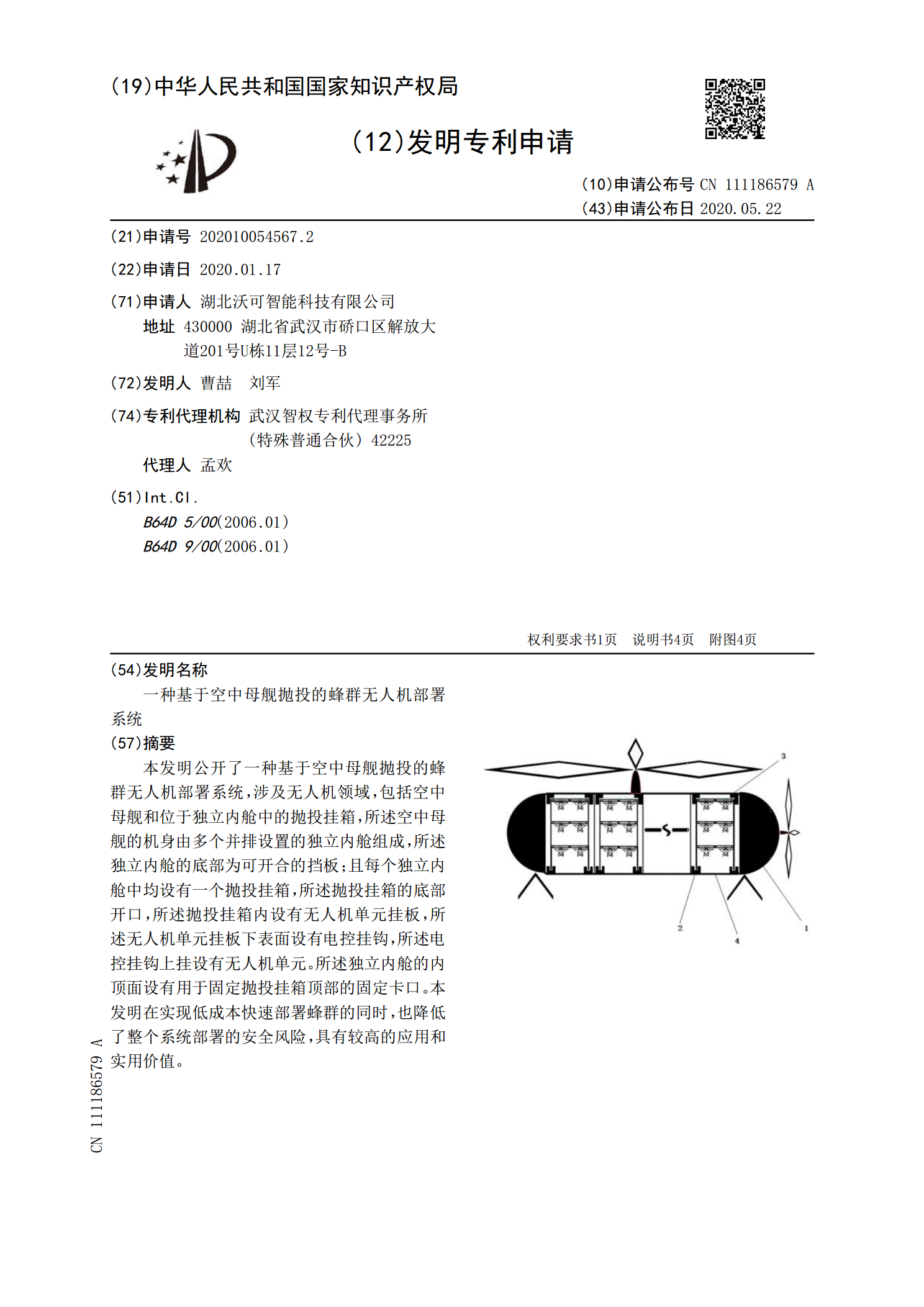
本发明公开了一种基于空中母舰抛投的蜂群无人机部署系统,涉及无人机领域,包括空中母舰和位于独立内舱中的抛投挂箱,所述空中母舰的机身由多个并排设置的独立内舱组成,所述独立内舱的底部为可开合的挡板;且每个独立内舱中均设有一个抛投挂箱,所述抛投挂箱的底部开口,所述抛投挂箱内设有无人机单元挂板,所述无人机单元挂板下表面设有电控挂钩,所述电控挂钩上挂设有无人机单元。所述独立内舱的内顶面设有用于固定抛投挂箱顶部的固定卡口。本发明在实现低成本快速部署蜂群的同时,也降低了整个系统部署的安全风险,具有较高的应用和实用价值。
一种蜂群无人机空中发射装置.pdf
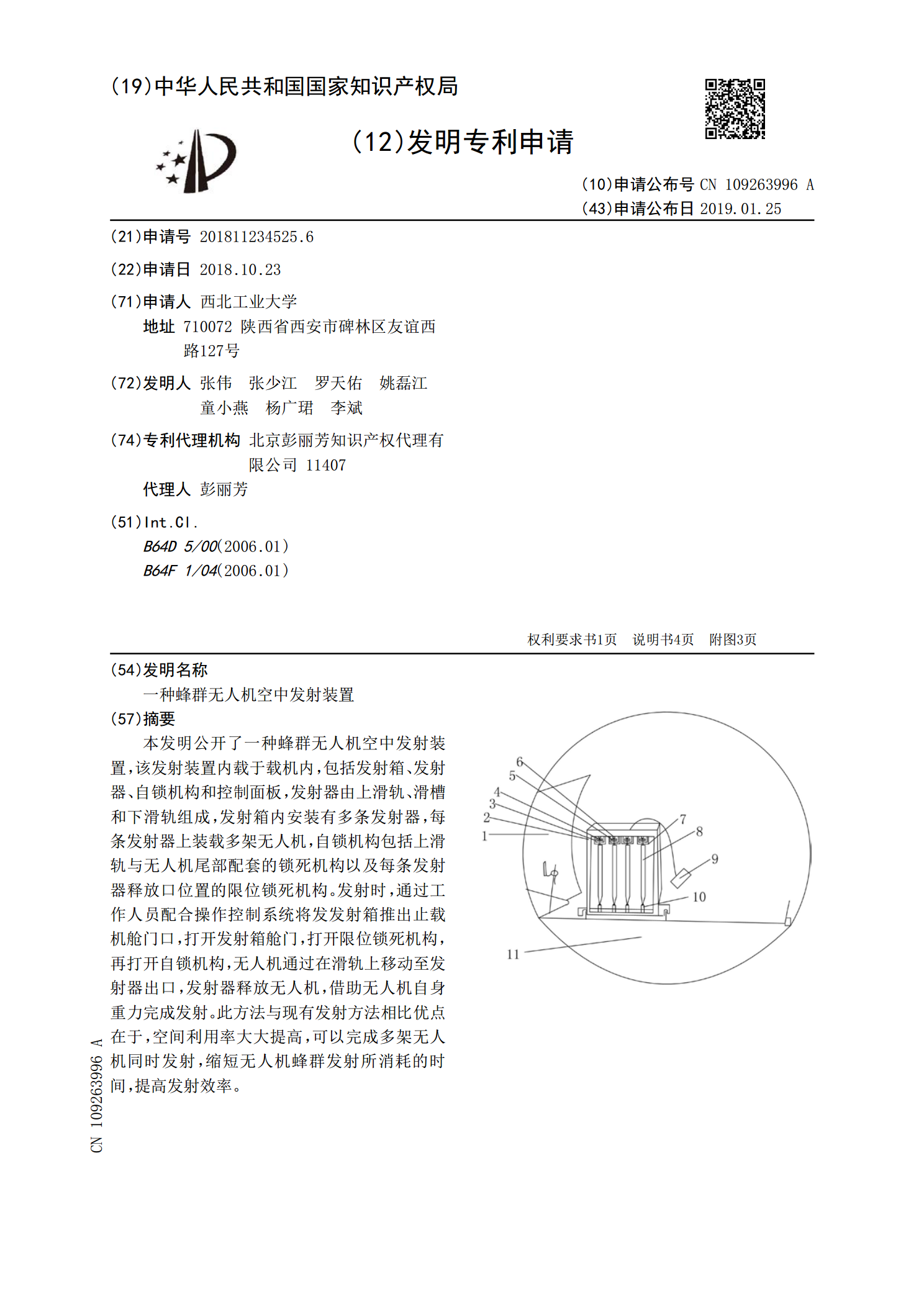
本发明公开了一种蜂群无人机空中发射装置,该发射装置内载于载机内,包括发射箱、发射器、自锁机构和控制面板,发射器由上滑轨、滑槽和下滑轨组成,发射箱内安装有多条发射器,每条发射器上装载多架无人机,自锁机构包括上滑轨与无人机尾部配套的锁死机构以及每条发射器释放口位置的限位锁死机构。发射时,通过工作人员配合操作控制系统将发发射箱推出止载机舱门口,打开发射箱舱门,打开限位锁死机构,再打开自锁机构,无人机通过在滑轨上移动至发射器出口,发射器释放无人机,借助无人机自身重力完成发射。此方法与现有发射方法相比优点在于,空间

无人机蜂群空中作战运用研究.docx
无人机蜂群空中作战运用研究随着科技的不断发展,无人机技术越来越成熟,无人机在国防领域得到广泛应用。作为一种新兴的作战方式,无人机蜂群空中作战,具有综合能力强、威力大、灵活性高等优势,在未来的战争中将发挥越来越重要的作用。本文将以无人机蜂群空中作战运用为切入点,分析其优势和挑战,并探讨未来的发展趋势。一、无人机蜂群空中作战的优势1.1综合能力强无人机蜂群空中作战可以集中多个无人机的能力,完成多种作战任务。在战场上,不同的任务需要不同的无人机来完成,例如侦察、打击、实时监控等任务,采用无人机蜂群可以实现不同的

一种蜂群无人机系统.pdf
一种蜂群无人机系统,将参与执行任务的多个无人机按层次编成多个逻辑组,逻辑群组的形成和逻辑群组中无线对等节点设备的运行无需服务器参与,最小单位的逻辑组组成自组网络,其包括一个组长节点和多个组员节点,组长节点向每个组员节点广播信息,并与每个组员进行认证及通信,还向上一层次的管理节点上报本逻辑组的逻辑组成员及每个组员的相关信息;所述组员节点接收组长节点的广播信息,并根据接收的广播信息更改自己的网络配置及信道,还根据组长节点的命令执行任务。本发明提供的系统使参加执行任务的无人机能够协同执行任务,增强了执行任务的能