
基于齿轮齿条机构的仿蜂鸟扑翼机构.pdf

努力****妙风

1/9
2/9

3/9
4/9

5/9
6/9
7/9
8/9

9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于齿轮齿条机构的仿蜂鸟扑翼机构.pdf
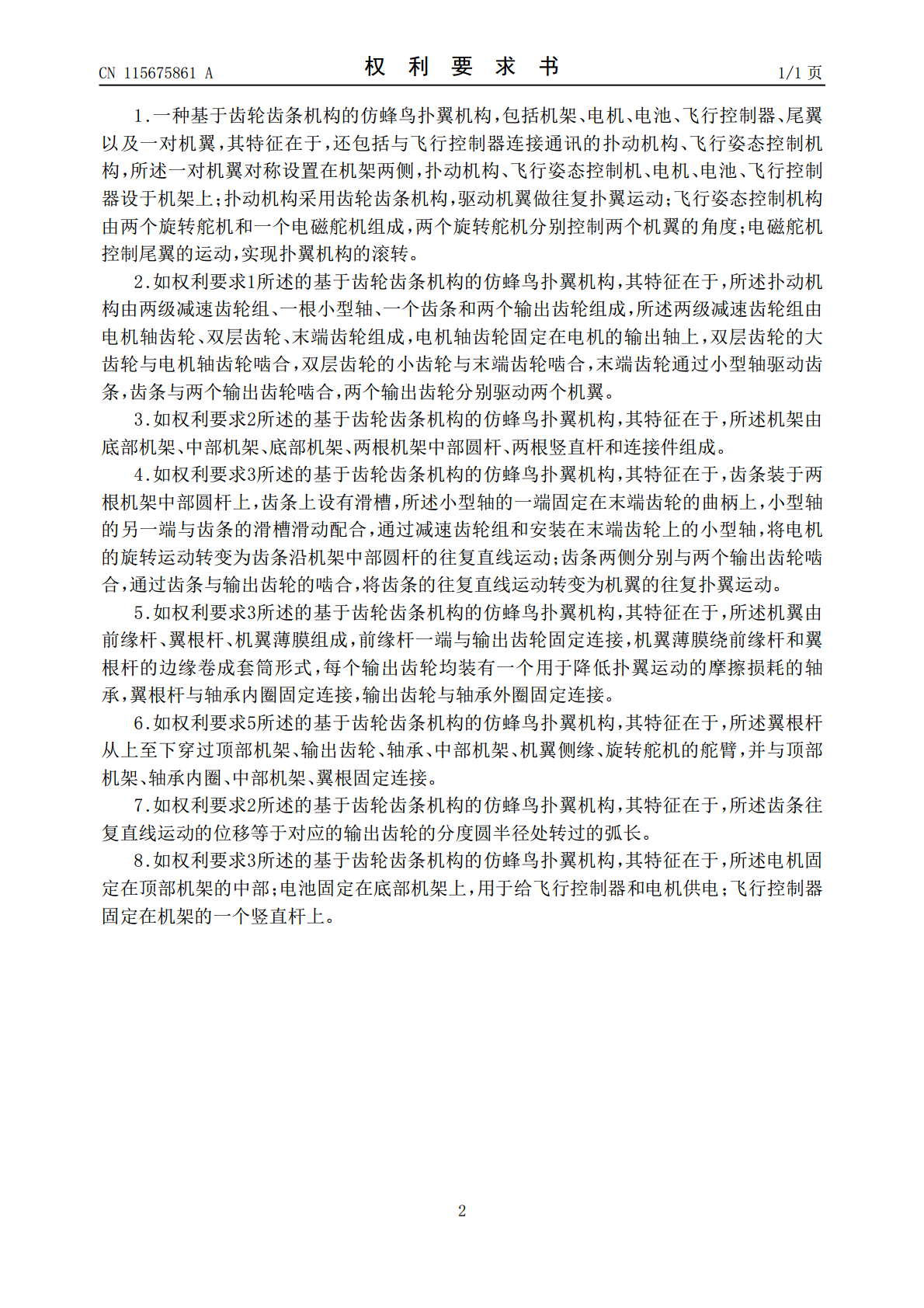
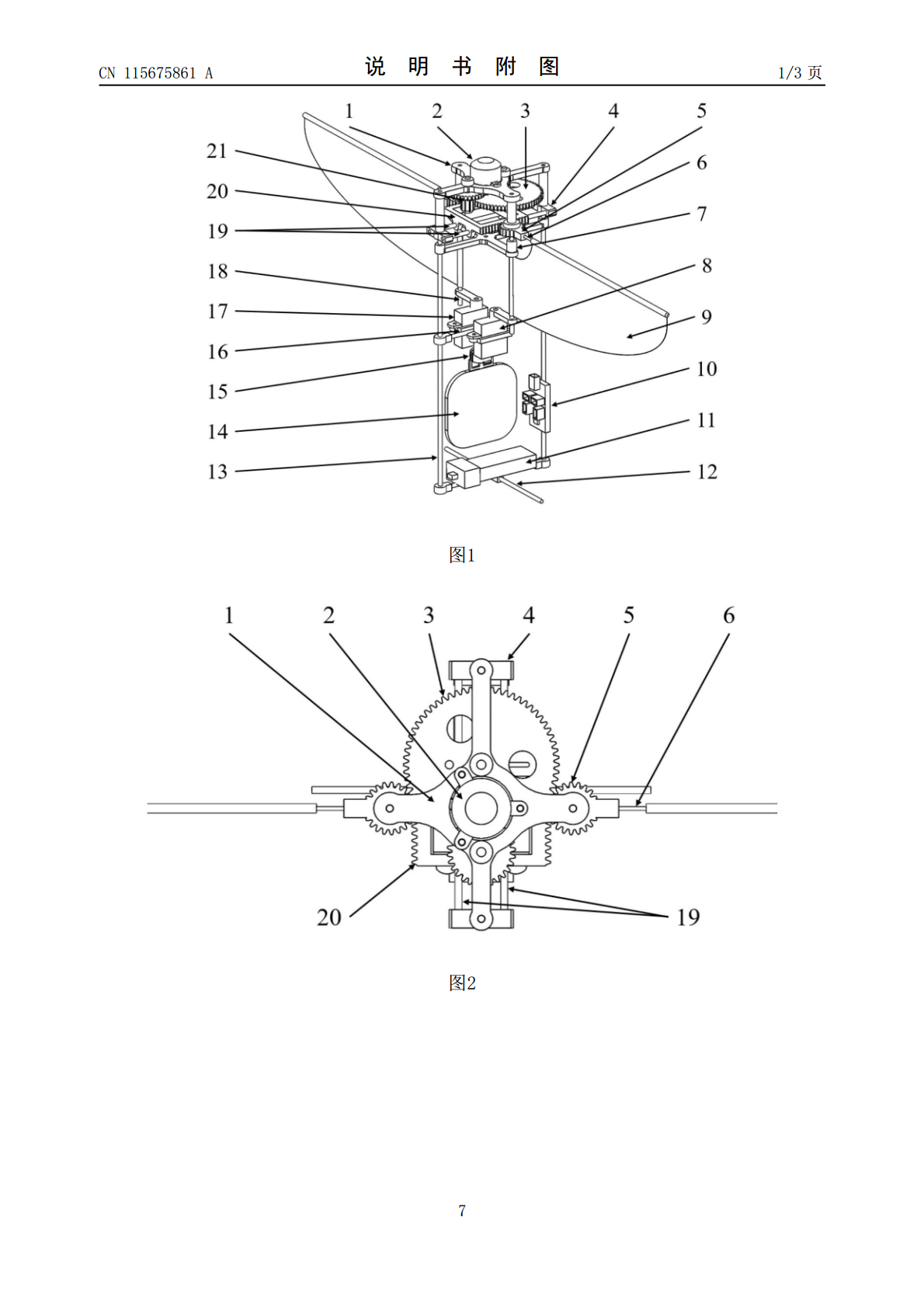
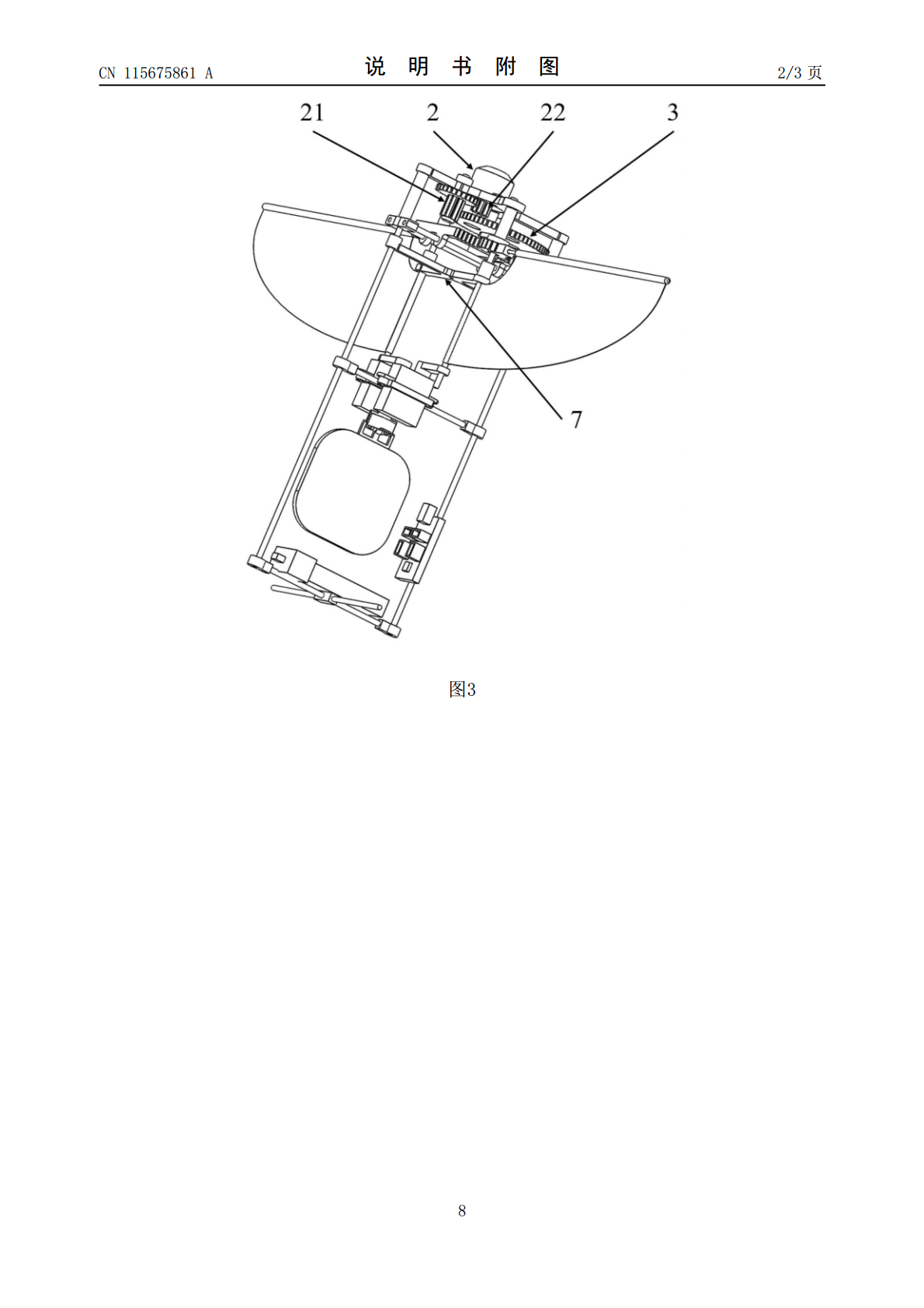
本发明实施例公开了一种基于齿轮齿条机构的仿蜂鸟扑翼机构,包括机架、电机、电池、飞行控制器、尾翼、一对机翼、扑动机构、飞行姿态控制机构,所述一对机翼对称设置在机架两侧,扑动机构、飞行姿态控制机、电机、电池、飞行控制器设于机架上;扑动机构采用齿轮齿条机构,驱动机翼做往复扑翼运动;飞行姿态控制机构由两个旋转舵机和一个电磁舵机组成,两个旋转舵机分别控制两个机翼的角度;电磁舵机控制尾翼的运动,实现扑翼机构的滚转。本发明结构简单、对称性好、容易加工制作、飞行姿态控制简单、可实现较大的扑动幅度。
基于翅翼变形的仿蜂鸟扑翼无人飞行器的控制机构.pdf
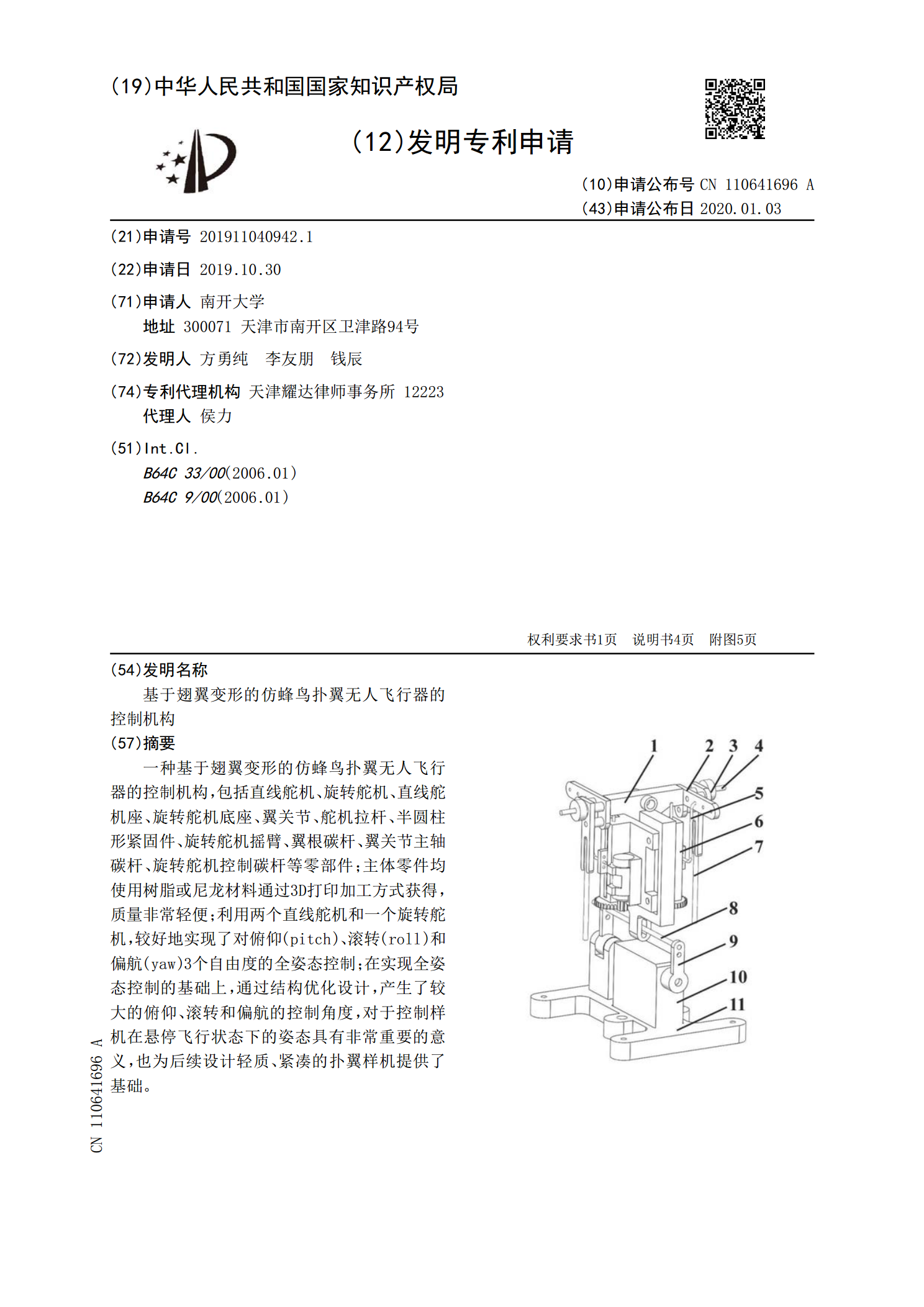
一种基于翅翼变形的仿蜂鸟扑翼无人飞行器的控制机构,包括直线舵机、旋转舵机、直线舵机座、旋转舵机底座、翼关节、舵机拉杆、半圆柱形紧固件、旋转舵机摇臂、翼根碳杆、翼关节主轴碳杆、旋转舵机控制碳杆等零部件;主体零件均使用树脂或尼龙材料通过3D打印加工方式获得,质量非常轻便;利用两个直线舵机和一个旋转舵机,较好地实现了对俯仰(pitch)、滚转(roll)和偏航(yaw)3个自由度的全姿态控制;在实现全姿态控制的基础上,通过结构优化设计,产生了较大的俯仰、滚转和偏航的控制角度,对于控制样机在悬停飞行状态下的姿态具

基于外啮合行星齿轮减速器的齿轮齿条副扑翼驱动机构.pdf
本发明提供一种基于外啮合行星齿轮减速器的齿轮齿条副扑翼驱动机构,包括机架、电机、平行齿轮减速器、外啮合行星齿轮减速器、盖板和齿轮齿条副连杆摇臂机构,其中,电机安装在机架上,驱动平行齿轮减速器,外啮合行星齿轮减速器通过曲柄轴孔和传动轴孔安装在由机架下半部分和盖板构成的内部空间,平行齿轮减速器通过传动轴驱动外啮合行星齿轮减速器,外啮合行星齿轮减速器通过曲柄连接齿轮齿条副连杆摇臂机构驱动扑翼。本发明中,利用外啮合行星齿轮减速器实现结构紧凑和大减速比,提高机构的输出扭矩,传动效率高且相对平稳,利用齿轮齿条副连杆摇
一种基于连杆机构的仿蜂鸟扑翼无人飞行器的驱动机构.pdf
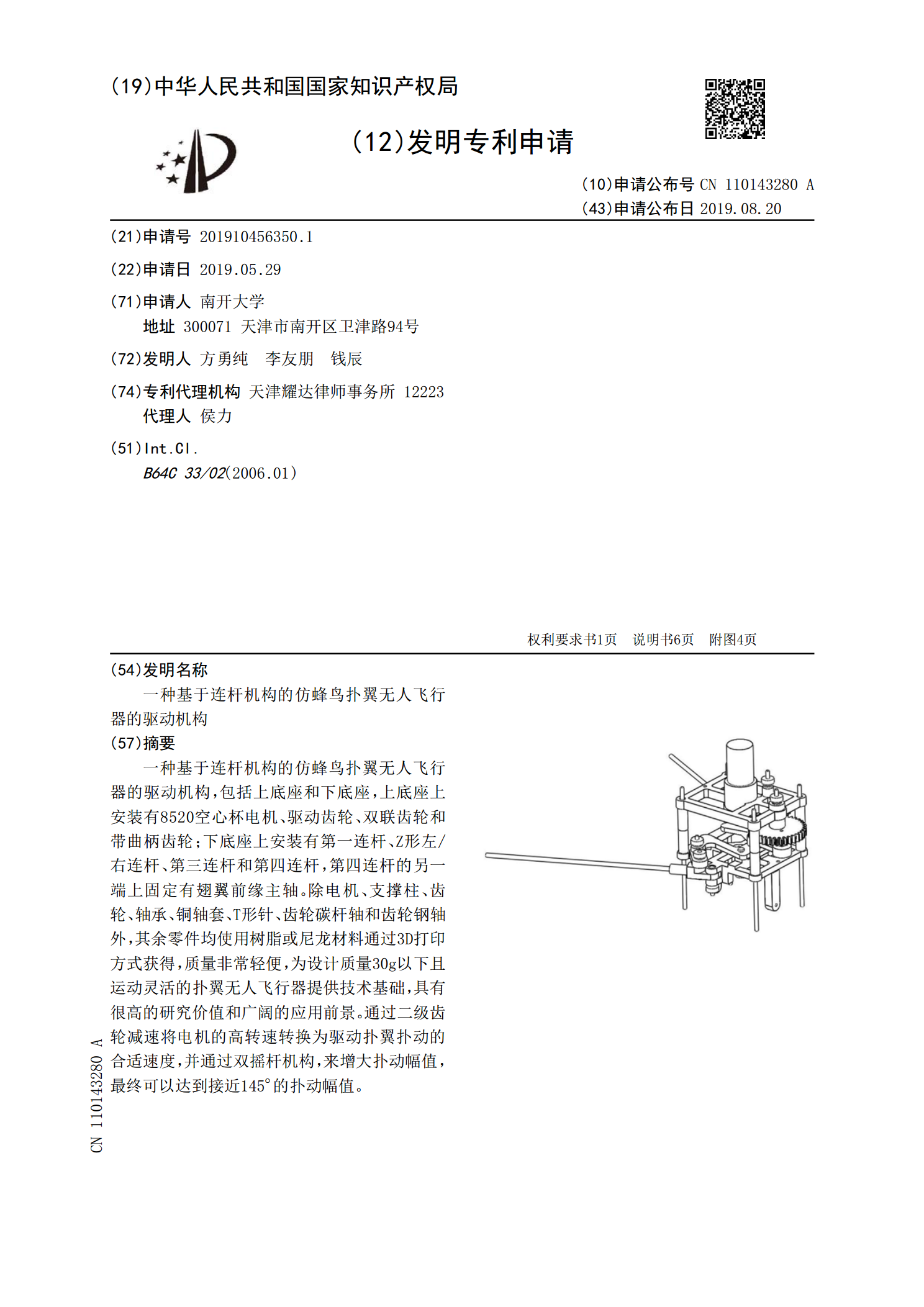
一种基于连杆机构的仿蜂鸟扑翼无人飞行器的驱动机构,包括上底座和下底座,上底座上安装有8520空心杯电机、驱动齿轮、双联齿轮和带曲柄齿轮;下底座上安装有第一连杆、Z形左/右连杆、第三连杆和第四连杆,第四连杆的另一端上固定有翅翼前缘主轴。除电机、支撑柱、齿轮、轴承、铜轴套、T形针、齿轮碳杆轴和齿轮钢轴外,其余零件均使用树脂或尼龙材料通过3D打印方式获得,质量非常轻便,为设计质量30g以下且运动灵活的扑翼无人飞行器提供技术基础,具有很高的研究价值和广阔的应用前景。通过二级齿轮减速将电机的高转速转换为驱动扑翼扑动
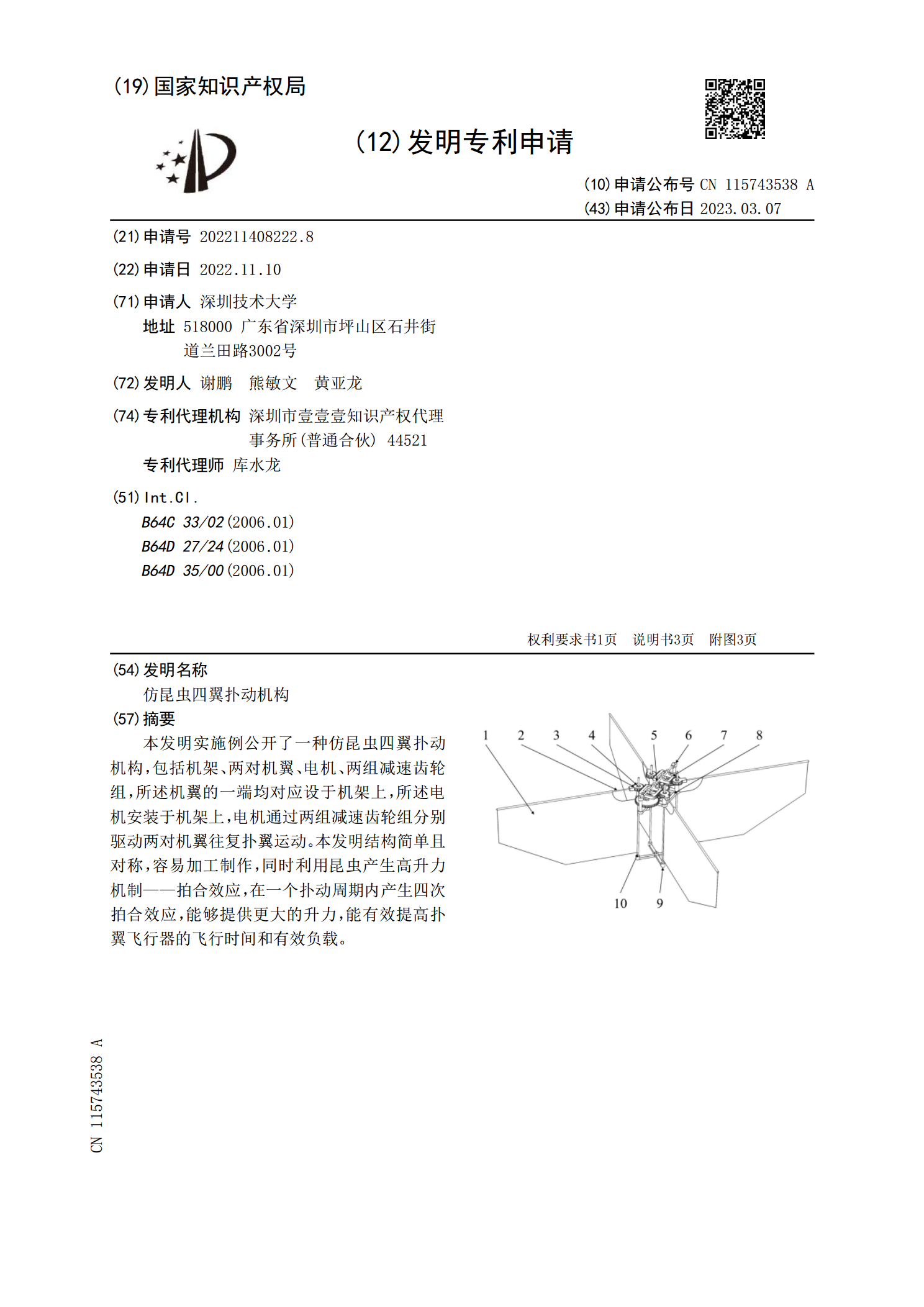
仿昆虫四翼扑动机构.pdf
本发明实施例公开了一种仿昆虫四翼扑动机构,包括机架、两对机翼、电机、两组减速齿轮组,所述机翼的一端均对应设于机架上,所述电机安装于机架上,电机通过两组减速齿轮组分别驱动两对机翼往复扑翼运动。本发明结构简单且对称,容易加工制作,同时利用昆虫产生高升力机制——拍合效应,在一个扑动周期内产生四次拍合效应,能够提供更大的升力,能有效提高扑翼飞行器的飞行时间和有效负载。